基于微波遥感的海表面盐度探测机制研究进展
2015-03-10 10:51严明严卫王迎强产世军介阳阳周霄林
遥感信息 2015年2期
严明,严卫,王迎强,2,产世军,介阳阳,周霄林
(1.解放军理工大学气象海洋学院,南京211101;2.电磁环境效应与光电工程国家级重点实验室,南京211101;3.中国人民解放军92925部队,山西长治046011;4.中国人民解放军61741部队,北京100194)
基于微波遥感的海表面盐度探测机制研究进展
严明1,严卫1,王迎强1,2,产世军3,介阳阳1,周霄林4
(1.解放军理工大学气象海洋学院,南京211101;2.电磁环境效应与光电工程国家级重点实验室,南京211101;3.中国人民解放军92925部队,山西长治046011;4.中国人民解放军61741部队,北京100194)
海表面盐度是气候学和海洋学的重要参数,利用海水盐度在L波段的辐射特性实现海表面盐度探测已经是国际上公认的有效手段。该文回顾了现有基于微波遥感的海表面盐度探测体制的研究进展,包括双波段探测体制、L波段被动探测体制、L波段主被动联合探测体制,着重介绍了机载L/S双波段,土壤温度观测卫星和宝瓶座应用科学卫星(Aquarius)的亮温校正技术,反演算法以及两颗盐度卫星的定标技术。此外,还介绍了一种基于GNSS反射信号(GNSS-R)技术的新型海表面盐度探测体制。最后,对基于微波遥感的不同海表面盐度探测体制的特点进行了总结比较,提出了未来海表盐度遥感可以改进的方向。
海表面盐度;微波遥感;探测体制;反演算法;GNSS-R;盐度探测
1 引 言
海表面盐度(Sea Surface Salinity,SSS)是气候学和海洋学的重要参数,是全球水循环和海洋环流的重要影响因素,在海洋-大气这一复杂系统中发挥着极其重要的作用。国外从上世纪70年代就开始研究盐度遥感的相关理论和技术,开展了大量的固定平台实验[1-2]、航空实验[3-5],以及卫星遥感实验[67]。国内华中理工大学[8]成功研制机载L波段微波辐射计并开展了航空遥感实验,得到的海水盐度精度为1.28‰~2.05‰。尽管L波段成为公认的盐度遥感的最佳波段[2-3,6,9],但就目前来看,L波段亮温对盐度的敏感性因受多种因素制约,盐度反演精度仍未达到令人满意的程度。
航空遥感的机动性较强,分辨率较高,但费用较为昂贵,且不适宜进行大范围连续观测。卫星遥感具有全天候、大范围的特点,适合全球范围内的长期观测。目前在轨运行的盐度遥感卫星有两颗:欧洲空间局的海表盐度遥感和土壤湿度观测卫星(the Soil Moisture and Ocean Salinity,SMOS)以及美国宇航局(NASA)和阿根廷航天局合作的宝瓶座应用科学卫星-D(Aquarius/SAC-D)。从国外现有的星载盐度计以及国内外对海表盐度遥感技术的研究来看,目前基于微波遥感的海表面盐度探测体制主要有:双波段探测体制、全被动探测体制、主被动相结合探测体制,此外本文还介绍了一种基于GNSS反射信号(GNSS-R)技术的新型盐度探测体制。
2 双波段探测体制
2.1 双波段探测体制介绍
该体制同时使用了两个波段的微波辐射计,利用海表面亮温在不同波段随海水温度和盐度的变化特性,能够在反演海表面盐度的同时也能反演出海表面温度。Blume等[4]最早提出了利用L/S波段亮温反演海表面盐度温度的方法;陆兆轼等[10]通过水池实验验证了双波段航空遥感反演盐度的可行性,得到的反演误差在0.3psu~0.5psu左右,最大反演误差为2.18psu;王杰[11]通过实验证实了双波段双极化的反演组合结果要优于仅使用L波段H/V极化亮温的单波段算法,得到了0.5psu的反演精度;赵凯等[12]通过高灵敏度机载L波段微波辐射计和S波段微波辐射计数据,获得了分辨率优于0.2 psu,误差精度0.42psu的测量结果。
平静海面的微波辐射亮温可以表示为频率f,极化方式p,入射角θ,海表面温度T和盐度S的表达式:

图1为入射角为0°时,海水介电常数模型采用KS模型的海表面亮温在L/S波段与温度和盐度的变化关系。在L波段海表面亮温对盐度的敏感性较强,而在S波段海表面亮温对温度的敏感性较强。
如果已知L和S两个波段的海面辐射亮温以及极化方式p和入射角θ,根据海表发射率在L/S波段的不同特性,那么就可以由式(2)求解得到海表面温度T和盐度S。

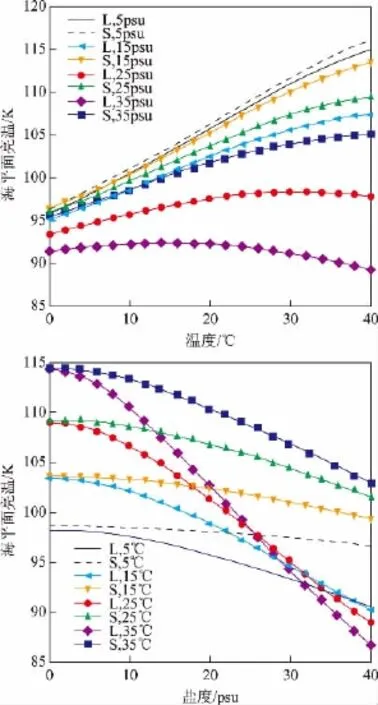
图1 海表面亮温在L/S波段与温度和盐度的变化关系
2.2 双波段反演技术
真实的海面辐射亮温必须分别充分考虑L和S两个波段下海面风生亮温、大气辐射、宇宙辐射等的影响。机载微波辐射计亮温与海表面亮温存在如下关系[4]:

其中,e为平静海面发射率,τh为高度为h时的大气不透明度,TCOS为宇宙背景辐射,TGAL为宇宙噪声,TATM为大气辐射亮温,ΔTW为风生亮温,ΔTSUN为太阳辐射亮温,ΔTp为天线亮温校正项。
Blume等详细讨论了上式中各物理量在L/S波段的大小,给出了海面辐射亮温的修正公式[4]:

其中,h为飞机高度(km),W 为海平面风速(m/s),TSR和TLR为对应的机载微波辐射计亮温,TSB和TLB为修正后的海表面亮温。可以看到,该修正公式中忽略了风速对L波段海平面辐射亮温的影响。然而一些研究表明[14-16],风速对L波段海面亮温的贡献将带来不能忽略的盐度反演误差。
Blume等提出了利用L/S波段亮温反演海表面盐度温度的方法并基于多元线性回归给出了反演的算法[4]:

式中,TSB和TLB分别为S、L波段微波辐射亮温,F为所求的海水温度或盐度,Xi为所对应的一组系数。史久新等[13]在此基础上优化了多项式的系数,进一步提高了反演精度,并提出了一种半解析反演算法。
3 L波段被动微波探测机制
3.1 SMOS卫星计划相关介绍
全被动微波探测体制使用被动式的微波辐射计进行亮温观测反演盐度。通过采用合成孔径技术,可以获得高空间分辨率的盐度信息。但这种盐度探测体制需要海面风场,海表温度等辅助数据,辅助数据的精度会影响到盐度反演的结果。早在上世纪70年代Lerner和Hollinger[6]就利用Skylab卫星上的1.4GHz微波辐射计S-194进行了盐度反演的相关研究。欧空局的SMOS卫星于2009年11月发射,是目前在轨运行的全被动探测体制卫星。
SMOS卫星的主要目标是提供特定精度、灵敏度、空间分辨率、空间覆盖与实时覆盖的土壤湿度和海洋盐度图像。SMOS卫星运行在太阳同步轨道,平均轨道高度为755km,将提供分辨率为100km和200km的10天~30天平均的全球海洋盐度数据,精度达到0.1psu[17]。使用L波段的合成孔径辐射计(Microwave Imaging Radiometer with Aperture Synthesis,MIRAS),MIRAS采用Y形天线阵列稀疏方案,每根臂长4.5m,相邻2个天线臂的夹角为120°,整个系统含69个L波段接收机单元,入射角变化范围:0°~65°,分辨率为32km~100km,是目前最先进的综合孔径辐射计系统[18]。SMOS的L波段微波辐射计直接获取海面亮温,反演盐度所需的海面温度和海面风向风速的辅助数据由欧洲中期天气预报中心(European Center for Medium Range Weather Forcasting,ECWMF)提供。
3.2 SMOS定标方案
SMOS定标是指对其搭载的观测仪器MIRAS进行定标。定标的过程是将辐射计观测的原始数据转化成观测亮温,对于SMOS来说主要指数据预处理环节中从0级数据到1级数据的转化过程[19]。这其中包含了4个步骤,即L0、L1a、L1b到L1c的转化。L0到L1a级数据是将原始观测数据经过定标模型的处理得到可见度数据。L1a到L1b级数据转化是将可见度数据经过图像重构算法转化成亮温。L1c为基于条带状的亮温值地图。
SMOS定标的基础是基于可见度函数以及Corbella方程[20]。可见度函数表示为:

其中,Vkj表示可视化函数,k,j表示接受机,Tsys,k和Tsys,j表示来自NIR的系统温度,Gkj表示两接收机k、j的条纹函数公共项,Mkj为归一化相关项。
Corbella方程表示为:

其中,(ξ,η)是方向余弦,fo为中心频率,(u,v)是中心波长,D为天线最大增益,Fn为极化方式选定时的天线电压的归一化值,TB为亮温温度,Tr为接收机的物理温度,r为条纹函数。
基于以上公式结合噪声注入定标模型,就可得到辐射计的相位以及振幅增益和偏移量。
3.3 SMOS反演技术
SMOS的盐度反演前向模型主要包括平静海面、海面粗糙度、海面泡沫覆盖、大气传输、法拉第旋转、宇宙噪声等[21]。其反演流程图如图2所示。
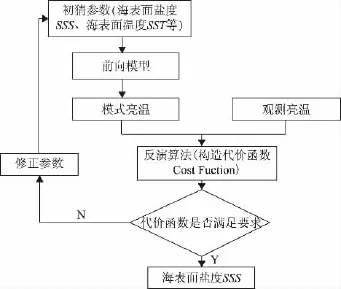
图2 SMOS反演算法流程图
由于SMOS只有被动式的微波辐射计,对于海面粗糙度的修正只能依靠辅助资料。SMOS反演算法中使用了3种不同的海面粗糙度模型:双尺度模型TSM[22-23]+2×Durden&Vesecky海浪谱[24],小斜率模型SSA/SPM[25]+Kudryatsev海浪谱[26]以及经验模型[14-15,27],不同粗糙度模型所需的辅助资料有所不同。
风浪破碎产生的泡沫会对海表面微波辐射产生影响。SMOS海面泡沫覆盖模型的公式为[28]:

Tb,foam为泡沫覆盖导致的海面亮温增量,f、p、θ、WS、h分别为频率、极化、入射角、风速,etypfoam;p为泡沫层的发射率,F为风速WS和厚度h条件下的白冠层覆盖率。
大气中的氧气和水蒸气含量会对L波段海表亮温探测产生影响。大气辐射传输的基本模型为[29]:

Tbm为到传输至大气层顶端的亮温,Tbs为海表亮温,Tbup和Tbdown为大气上下行辐射,e-τ为大气透射率,Γ为菲涅尔反射率。
电离层的法拉第旋转效应对亮温探测的影响可以表示为[30]:

空间环境对亮温的影响主要包括宇宙背景辐射,银河系辐射以及天体辐射。利用L波段天空辐射图可以对辐射计的观测值进行校正以消除这部分因素的影响[31]。
SMOS反演算法的核心公式是:

其中,N为不同极化条件下不同入射角的有效观测次数,M为先验参数的个数,Tmodbi为某一次的亮温观测值,Tmodbi为与之相应的模式观测值,θn为入射角,P代表个影响亮温的各个参数:海表面盐度SSS,海表面温度SST,海面风速WS,海面风向φ,有效波高SWH,逆波年龄Ω,垂直电场量TEC等。σ2Tbi为亮温测量的不确定度。它由仪器噪声σTb_meas_i和测量不确定度σTb_meas_i合成:σ2Tbi=σ2Tb_meas_i+σ2b_model_i。Pi0为对应亮温影响量P的先验信息,σ2Pi为先验信息的方差估计,由辅助资料获得。该算法首先输入一组初始值,通过反复迭代使构造的代价函数x2达到最优从而反演出海表面盐度。
4 L波段主被动联合探测机制
4.1 Aquarius/SAC-D卫星计划介绍
这种盐度探测体制采用了微波辐射计与散射计相结合的形式。Yueh[32]等指出,雷达后向散射信号对海面粗糙度敏感而对海表温度和盐度不敏感,因此可以对海面粗糙度起到修正作用。其主要代表为美国宇航局(NASA)和阿根廷空间局(CONAE)共同研制的Aquarius/SAC-D卫星。
Aquarius的主要目标是检测大洋表面盐度场大范围特征的季节性和年度间的变化,提供的数据用于更好地理解海洋水循环和其对气候的影响,并有助于更好地研究全球水循环以及它的变化过程。Aquarius位于太阳同步轨道上,轨道高度657km,倾角98°,刈幅为390km,能够实现7天全球覆盖,提供150km空间分辨率下的月平均精度为0.2psu的全球海表面盐度分布[33]。Aquarius主要由1.413GHz的L波段微波辐射计和1.26GHz的L波段散射计组成。被动式的L波段微波辐射计的3个馈源对应的入射角分别为29.3°、38.2°、46.3°,用于测量海平面辐射亮温,主动式的L波段微波辐射计用于测量海面粗糙度。在Aquarius系统设计中,散射计和辐射计工作于近似相同的频率,共享同一天线源,在近似同样的足迹中观测相同的相元,以保证数据的时空一致性。Aquarius的辐射计能够利用极化通道测量第三斯托克斯分量,以消除法拉第旋转效应[30]。Aquarius的天线波束指向轨道的夜晚时间一方,从而解决太阳辐照和海表面反射到天线主波束的问题[34]。Aquarius在盐度反演中所需的海面温度资料由NOAA OISST(Reynolds)产品提供,大气辐射修正中所需的温压湿等廓线资料由NCEP提供。
4.2 Aquarius定标方案
Aquarius辐射计定标是指对其搭载的极化微波辐射计进行定标,将一起观测的原始数据转化为观测亮温。Aquarius定标过程主要包含在其1级数据的处理过程中。Aquarius定标主要包含噪声定标、冷空定标以及卫星间互定标等几部分。
Aquarius配置的相关噪声二极管可以提供参考的噪声注入,用以对接收机信号的相位和振幅进行校正,从而对包括第三Stokes参数亮温在内的极化数据进行定标。噪声注入定标基于的定标方程表示为[35]:

其中,¯V是输出响应矢量,¯TB(Tv,Th,T3)表示亮温,¯g和¯o构成辐射计的增益和偏移量参数,¯n是噪声。
冷空定标指通过对2.73K宇宙背景辐射的照射来对辐射计观测温度的低端进行定标。Aquarius进行冷空定标时,平台会沿着俯仰旋转180°,使得观测波束朝向宇宙远端,从而获得宇宙背景辐射的照射[36]。
卫星间互定标指Aquarius与在轨运行其他微波辐射计之间的相互定标。当全极化微波辐射计WindSat在轨运行时,Aquarius可以与WindSat的观测数据进行时空匹配[37],利用WindSat的观测数据对Aquarius的亮温进行校正。Aquarius的互定标还可以基于NASA的微波辐射计卫星间定标工作组ICWG(Inter-sat Calib Working Group)提供的近实时空间匹配微波辐射计数据集进行定标。
4.3 Aquarius反演技术
图3为入射角30°时,海水介电常数模型采用MW模型的海平面亮温随盐度的敏感性变化关系。L波段海表辐射亮温随海表面盐度的上升而递减,且同一温度下垂直极化亮温对盐度的敏感性比水平极化亮温对盐度的敏感性较强。目前Aquarius V2.0产品仅使用L波段垂直极化亮温通过迭代运算进行盐度反演。
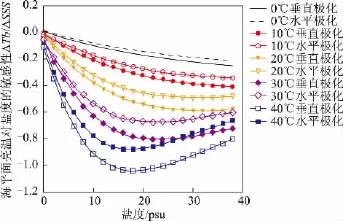
图3 入射角为30°时,海平面亮温对盐度的敏感性分析
Aquarius的反演过程中主要对天线亮温进行无线电频率干扰,宇宙辐射,天线方向图,法拉第旋转,大气辐射以及海面粗糙度校正,由得到的平静海面亮温值利用MW模型和海表发射率公式反演出海表面盐度[38],其v2.0产品的反演流程如图4所示。

图4 Aquarius V2.0反演算法流程图
天线方向图校正是去除天线交叉极化以及旁瓣的影响,将辐射计接收到的天线温度转化成电离层顶部的亮温,其校正公式为[38]:

Tτoi为电离层顶部的亮温,TA为天线亮温,A是依据最小二乘原理确定的天线方向图校正矩阵。
Aquarius在法拉第旋转校正和大气辐射校正中所使用的基本模型与SMOS相同,而在海面粗糙度校正部分,Aquarius使用主动式散射计进行海面粗糙度修正。其2.0产品中运用了散射计vv极化散射截面系数和NCEP风场资料进行粗糙度修正[39]:

其中,ΔEW为海面粗糙度引起的亮温贡献,WNCEP和φrel为由NCEP资料获得的风速和风向,A0,A2,A3,B1,B2是NCEP风速的多项式。R′(WNCEP,σo′VV)可以通过粗糙度校正图得到。
Aquarius在盐度反演算法中使用的海水介电常数模型为MW模型,它是由Meissner和Wentz[40-41]基于双Debye方程得到的,有效范围-2℃~34℃,0psu~40psu。该模型与SMOS所采用的KS模型[42]在低温条件下存在着较为明显的差异(图5)。目前KS模型仍是普遍认可的介电常数模型。
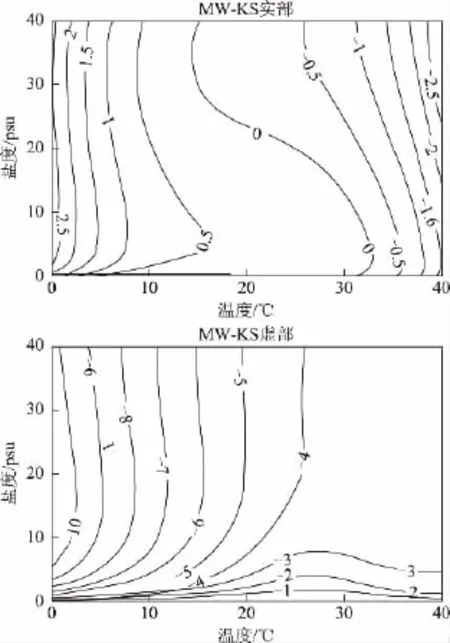
图5 MW模型与KS模型实部和虚部的差异对比
5 L波段与GNSS-R结合探测机制
5.1 GNSS-R探测技术介绍
GNSS全称为全球导航卫星系统(Global Navigation Satellite System),它泛指所有的卫星导航系统,如美国的GPS(the US Global Positioning System)、俄罗斯的Glonass(the Russian Global Navigation Satellite System),欧洲的Galileo,中国的北斗导航系统,以及相关的增强系统,同时涵盖在建和以后要建设的其他卫星导航系统。
大量基于岸基,机载和宇航实验研究表明,GNSS反射信号可以被接受并利用来反演海面风场[4345]、有效波高[46-47]、海面高度[48-49]等海洋参数。与传统遥感技术相比,GNSS-R技术具有造价低,功耗小,不易受干扰等特点。
关于GNSS-R数据对辐射计亮温校正的可行性研究,国外ESA等研究机构从2003年开始已进行了地基和空基试验,开展了初步研究工作。2003年,ESA的研究人员设计了用于海洋监测的无源先进单元(Passive Advanced Unit,PAU)[50]。PAU包含了3个传感器:用于测量海表亮温的L波段辐射计,用于测量海况的GPS反射信号接收机,以及用于测量海面温度的红外辐射计。2009年ESA利用PAU方案进行了双极化L波段全功率辐射计和GNSS-R接收机相结合的地基ALBATROSS试验[51],成功证明了直接利用GNSS-R观测数据校正由于海态导致的亮温影响的可行性以及发展辐射计/反射计综合传感器的可行性。
5.2 GNSS-R反演海面粗糙度原理
GNSS-R反演海面粗糙度的方法主要是通过接收机接收到的DDM(Delay-Doppler Map)波形得到。根据Zavorotny等人推导的表达式,GNSS信号海面散射信号可以表示为[52]:

其中,

Ti为相干积分时间,τ为延迟,fd为多普勒频率,→ρ为海面上某点的位置向量,R为菲涅尔反射系数,D为天线增益,R为发射机与散射点之间的距离,R0为接收机与散射点之间的距离,Λ是伪随机码的自相关函数,S是多普勒频移的函数,σ0(ρ→)为散射截面模型。利用式(18)可以计算出海表面任意的延迟/多普勒单元到达接收机的GNSS信号功率。DDM波形图中包含了海面粗糙度的有关信息,通过对DDM波形参数(如DDM体积,DDM面积)的与海态参数的关系以及亮温增量与海态参数关系的研究,建立DDM波形参数与海表亮温增量的关系,从而就能实现GNSS-R信号作为辅助数据反演盐度的可能性。
尽管利用GNSS-R信息与L波段微波辐射计之间的协同工作实现海表盐度的反演是可行的,但目前对于相关算法的研究还不多。Marchán[53]等从归一化的DDM波形图中提取了DDM体积和DDM面积参数,并初步建立了海面亮温与之的对应关系。Sabia提出了一个带有GNSS-R接收机的卫星与SMOS卫星编队飞行的假设,并给出了利用GNSS信号获得的mss(mean square slope)参数构造代价函数进行盐度反演的公式[54]:
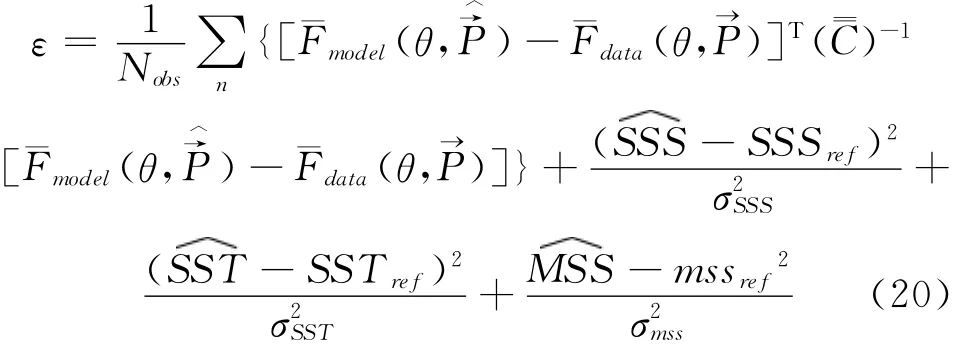
上式与式(13)类似,将风速WS替换为海面均方斜率mss,其中=C为由SMOS工作模式,参考系以及视场像素位置等得出的协方差矩阵。
6 结束语
现有盐度探测体制中,L/S双波段盐度探测体制目前应用于机载探测实验,不依赖海表温度资料,能够同时反演得到海表温度和盐度。尽管机载探测较星载探测在正演模型中所需考虑的影响因素较少,且具有高机动高分辨率等特点,但不具有大范围连续性观测的能力。星载探测能够研究海表面盐度对全球气候性变化的影响,因此已成为目前探测海表面盐度的主要发展趋势。目前已经升空的SMOS卫星和Aquarius卫星采用了各自不同的盐度探测体制。SMOS卫星是L波段全被动探测体制的代表,它的主要优势在于采用了合成孔径微波辐射计MIRAS,能够获得传统星载微波辐射计难以获得的高分辨率盐度信息。其不足之处主要在于需要较多的外部数据,辅助数据的精度对盐度反演的精度影响较大[55]。以Aquarius为代表的L波段主被动联合探测体制虽然能够通过主动方式探测海面粗糙度,但是主动化探测器造价较高,卫星轻量化要求不能得到满足。目前Aquarius V2.0盐度产品的反演算法中,对于海面粗糙度修正仍然离不开NCEP辅助资料的支持。
GNSS-R技术采用无源探测方法,具有成本低、获取数据量多和快速的特点,降雨对L波段的衰减频率很小,并且它的占用率低于其他波段,与其他波段不易发生相互干扰。GNSS-R技术通过DDM波形反演得到的海态参数,包括风场、海面均方倾斜等都是海面粗糙度的指示器。因此GNSS-R与L波段微波辐射计相结合的这一机制具有一定的应用前景。但是星载GNSS-R反演海面粗糙度尚未实现业务化,相关技术尚处在不断成熟过程中,同时面临海面镜像反射点的时空匹配问题[54],相关研究值得进一步开展,以解决GNSS-R反演海面粗糙度的精度等问题。
总的来看,现有盐度探测机制的盐度反演精度还需进一步提高,除了使用高精度遥感仪器外,还可以从以下方面着手:①充分考虑盐度反演过程中海面粗糙度、大气传输、法拉第旋转、宇宙辐射、天线噪声等因素的影响,提高模型的准确性。②采用新的反演算法,例如Aquarius数据采用了MLE(Maximum Likelihood Estimation)算法后,盐度反演的均方根误差由0.34psu提高到0.27psu。③减少反演过程中对辅助资料的依赖性。
[1] HOLLINGER J P.Passive microwave measurements of sea surface roughness[J].Geoscience Electronics,IEEE Transactions on,1971,9(3):165-169.
[2] SWIFT C T,MCINTOSH R E.Considerations for microwave remote sensing of ocean-surface salinity[J].Geoscience and Remote Sensing,IEEE Transactions on,1983(4):480-491.
[3] DROPPLEMAN J D,MENNELLA R A,EVANS D E.An airborne measurement of the salinity variations of the mississippi river outflow[J].Journal of Geophysical Research,1970,75(30):5909-5913.
[4] BLUME H J C,KENDALL B M,FEDORS J C.Measurement of ocean temperature and salinity via microwave radiometry[J].Boundary-Layer Meteorology,1978,13(1-4):295-308.
[5] BLUME H J C,KENDALL B M.Passive microwave measurements of temperature and salinity in coastal zones[J].Geoscience and Remote Sensing,IEEE Transactions on,1982(3):394-404.
[6] LERNER R M,HOLLINGER J P.Analysis of 1.4GHz radiometric measurements from skylab[J].Remote Sensing of Environment,1977,6(4):251-269.
[7] LAGERLOEF G S E,SWIFT C T,LEVINE D M.Sea surface salinity:The next remote sensing challenge[J].Oceanography,1995,8(2):44-50.
[8] 雷震东,曾原,林士杰,等.航空微波遥感海水盐度的研究[J].宇航学报,1992,13(2):62-67.
[9] 殷晓斌,刘玉光,张汉德,等.海表面盐度的微波遥感-平静海面的微波辐射机理研究[J].高技术通讯,2005,15(8):86-90.
[10] 陆兆轼,史久新,矫玉田,等.微波辐射计遥感海水盐度的水池实验研究[J].海洋技术,2006,25(3):70-75.
[11] 王杰.微波遥感海水盐度的算法和影响因素分析[D].青岛:国家海洋局第一海洋研究所,2007.
[12] 赵凯,史久新,张汉德.高灵敏度机载L波段微波辐射计探测海表盐度[J].遥感学报,2008,12(2):277-283.
[13] 史久新,陆兆轼,李淑江,等.L/S波段微波遥感海水盐度和温度的反演算法[J].高技术通讯,2006,16(11):1181-1184.
[14] CAMPS A,FONT J,ETCHETO J,et al.Sea surface emissivity observations at L-band:First results of the wind and salinity experiment WISE 2000[J].Geoscience and Remote Sensing,IEEE Transactions on,2002,40(10):2117-2130.
[15] CAMPS A,FONT J,VALL-LLOSSERA M,et al.The WISE 2000and 2001field experiments in support of the SMOS mission:Sea surface L-band brightness temperature observations and their application to sea surface salinity retrieval[J].Geoscience and Remote Sensing,IEEE Transactions on,2004,42(4):804-823.
[16] 殷晓斌,刘玉光,张汉德.海面风向不确定性对海表面盐度反演影响的剔除[J].科学通报,2006,51(3):349-354.
[17] SILVESTRIN P,BERGER M,KERR Y,et al.ESA’s second earth explorer opportunity mission:The soil moisture and ocean salinity mission-SMOS[J].IEEE Geoscience and Remote Sensing Newsletter,2001,(118):11-14.
[18] FONT J,LAGERLOEF G S E,LE VINE D M,et al.The determination of surface salinity with the european SMOS space mission[J].Geoscience and Remote Sensing,IEEE Transactions on,2004,42(10):2196-2205.
[19] GUTIERREZ A,BARBOSA J,ALMEIDA N,et al.SMOS L1Processor prototype:From digital counts to brightness temperatures[C].Geoscience and Remote Sensing Symposium,2007.IGARSS 2007.IEEE International.IEEE,2007:3626-3630.
[20] CORBELLA I,TORRES F,CAMPS A,et al.MIRAS end-to-end calibration:Application to SMOS L1processor[J].Geoscience and Remote Sensing,IEEE Transactions on,2005,43(5):1126-1134.
[21] ZINE S,BOUTIN J,FONT J,et al.Overview of the SMOS sea surface salinity prototype processor[J].Geoscience and Remote Sensing,IEEE Transactions on,2008,46(3):621-645.
[22] YUEH H A,SHIN R T,KONG J A.Scattering of electromagnetic waves from a periodic surface with random roughness[C].1988Orlando Technical Symposium.International Society for Optics and Photonics,1988:96-103.
[23] YUEH S H.Modeling of wind direction signals in polarimetric sea surface brightness temperatures[J].Geoscience and Remote Sensing,IEEE Transactions on,1997,35(6):1400-1418.
[24] DURDEN S,VESECKY J.A physical radar cross-section model for a wind-driven sea with swell[J].Oceanic Engineering,IEEE Journal of,1985,10(4):445-451.
[25] JOHNSON J T,ZHANG M.Theoretical study of the small slope approximation for ocean polarimetric thermal emission[J].Geoscience and Remote Sensing,IEEE Transactions on,1999,37(5):2305-2316.
[26] KUDRYAVTSEV V N,MAKIN V K,CHAPRON B.Coupled sea surface-atmosphere model:2.spectrum of short wind waves[J].Journal of Geophysical Research:Oceans(1978-2012),1999,104(C4):7625-7639.
[27] GABARRO C,FONT J,CAMPS A,et al.A new empirical model of sea surface microwave emissivity for salinity remote sensing[J].Geophysical Research Letters,2004,31(1):LD1608.
[28] REUL N,CHAPRON B.A model of sea-foam thickness distribution for passive microwave remote sensing applications[J].Journal of Geophysical Research:Oceans(1978-2012),2003,108(C10).
[29] SKOU N,HOFFMAN-BANG D.L-band radiometers measuring salinity from space:Atmospheric propagation effects[J].Geoscience and Remote Sensing,IEEE Transactions on,2005,43(10):2210-2217.
[30] YUEH S H.Estimates of faraday rotation with passive microwave polarimetry for microwave remote sensing of earth surfaces[J].Geoscience and Remote Sensing,IEEE Transactions on,2000,38(5):2434-2438.
[31] LEVINE D M,ABRAHAM S.Galactic noise and passive microwave remote sensing from space at l-band[J].Geoscience and Remote Sensing,IEEE Transactions on,2004,42(1):119-129.
[32] YUEH S H,WILSON W J,DINARDO S.Polarimetric radar remote sensing of ocean surface wind[J].Geoscience and Remote Sensing,IEEE Transactions on,2002,40(4):793-800.
[33] LEVINE D M,LAGERLOEF G S E,COLOMB F R,et al.Aquarius:An instrument to monitor sea surface salinity from space[J].Geoscience and Remote Sensing,IEEE Transactions on,2007,45(7):2040-2050.
[34] DINNAT E P,LEVINE D M.Impact of sun glint on salinity remote sensing:An example with the aquarius radiometer[J].Geoscience and Remote Sensing,IEEE Transactions on,2008,46(10):3137-3150.
[35] LAHTINEN J,GASIEWSKI A J,KLEIN M,et al.A calibration method for fully polarimetric microwave radiometers[J].Geoscience and Remote Sensing,IEEE Transactions on,2003,41(3):588-602.
[36] LEVINE D M,DINNAT E P,ABRAHAM S,et al.The aquarius simulator and cold-sky calibration[J].Geoscience and Remote Sensing,IEEE Transactions on,2011,49(9):3198-3210.
[37] BISWAS S K,JONES L,KHAN S,et al.MWR and windsat inter-satellite radiometric calibration plan[C].Microwave Radiometry and Remote Sensing of the Environment(MicroRad),2010 11th Specialist Meeting on.IEEE,2010:266-271.
[38] WENTZ F J,LEVINE D M.Algorithm theoretical basis document(ATBD),aquarius salinity retrieval algorithm[C].RSS Tech.Report 082912,Version 2,2012.
[39] LEVINE D M,MEISSNER T,WENTZ F J,et al.Addendum II to ATBD[C].RSS Tech.Report 082912:Addendum II,February 27,2013.
[40] MEISSNER T,WENTZ F J.The complex dielectric constant of pure and sea water from microwave satellite observations[J].Geoscience and Remote Sensing,IEEE Transactions on,2004,42(9):1836-1849.
[41] MEISSNER T,WENTZ F J.The emissivity of the ocean surface between 6and 90GHz over a large range of wind speeds and earth incidence angles[J].Geoscience and Remote Sensing,IEEE Transactions on,2012,50(8):3004-3026.
[42] KLEIN L,SWIFT C.An improved model for the dielectric constant of sea water at microwave frequencies[J].Antennas and Propagation,IEEE Transactions on,1977,25(1):104-111.
[43] KOMJATHY A,ARMATYS M,MASTERS D,et al.Developments in using GPS for oceanographic remote sensing:Retrieval of ocean surface wind speed and wind direction[C].Proc.of ION National Meeting,2001.
[44] GARRISON J L,KOMJATHY A,ZAVOROTNY V U,et al.Wind speed measurement using forward scattered GPS signals[J].Geoscience and Remote Sensing,IEEE Transactions on,2002,40(1):50-65.
[45] CARDELLACH E,RUFFINI G,PINO D,et al.Mediterranean balloon experiment:Ocean wind speed sensing from the stratosphere,using GPS reflections[J].Remote Sensing of Environment,2003,88(3):351-362.
[46] SOULAT F,CAPARRINI M,GERMAIN O,et al.Sea state monitoring using coastal GNSS-R[J].Geophysical Research Letters,2004,31(21):1-4.
[47] XIN W,QIANG S,XUNXIE Z,et al.First China ocean reflection experiment using coastal GNSS-R[J].Chinese Science Bulletin,2008,53(7):1117-1120.
[48] MARTIN-NEIRA M,CAPARRINI M,FONT-ROSSELLO J,et al.The PARIS concept:An experimental demonstration of sea surface altimetry using GPS reflected signals[J].Geoscience and Remote Sensing,IEEE Transactions on,2001,39(1):142-150.
[49] LOWE S T,ZUFFADA C,CHAO Y,et al.5cm precision aircraft ocean altimetry using GPS reflections[J].Geophysical Research Letters,2002,29(10):131-134.
[50] CAMPS A,BOSCH-LLUIS X,RAMOS-PEREZ I,et al.New instrument concepts for ocean sensing:Analysis of the PAU-radiometer[J].Geoscience and Remote Sensing,IEEE Transactions on,2007,45(10):3180-3192.
[51] VALENCIA E,MARCHAN-HERNANDEZ J F,CAMPS A,et al.Experimental relationship between the sea brightness temperature changes and the GNSS-R delay-doppler maps:Preliminary results of the albatross field experiments[C].Geoscience and Remote Sensing Symposium,2009IEEE International,IGARSS 2009.IEEE,2009,(3):741-744.
[52] ZAVOROTNY V U,VORONOVICH A G.Scattering of GPS signals from the ocean with wind remote sensing application[J].Geoscience and Remote Sensing,IEEE Transactions on,2000,38(2):951-964.
[53] MARCHAN-HERNANDEZ J F,RODRIGUEZ-ALVAREZ N,CAMPS A,et al.Correction of the sea state impact in the L-band brightness temperature by means of delay-doppler maps of global navigation satellite signals reflected over the sea surface[J].Geoscience and Remote Sensing,IEEE Transactions on,2008,46(10):2914-2923.
[54] SABIA R,CAPARRINI M,RUFFINI G.Potential synergetic use of GNSS-R signals to improve the sea-state correction in the sea surface salinity estimation:Application to the SMOS mission[J].Geoscience and Remote Sensing,IEEE Transactions on,2007,45(7):2088-2097.
[55] SABIA R,CAMPS A,VALL-LLOSSERA M,et al.Impact on sea surface salinity retrieval of different auxiliary data within the SMOS mission[J].Geoscience and Remote Sensing,IEEE Transactions on,2006,44(10):2769-2778.
Progress in Sea Surface Salinity Probe Technology Based on Microwave Remote Sensing
YAN Ming1,YAN Wei1,WANG Ying-qiang1,2,CHAN Shi-jun3,JIE Yang-yang1,ZHOU Xiao-lin4
(1.Institute of Meteorology and Oceanography,PLA University of Science and Technology,Nanjing211101;2.National Key Laboratory on Electromagnetic Environmental Effects and Electro-Optical Engineering,Nanjing211101;3.No.92925 Army of PLA,Changzhi 046011;4.No.61741 Army of PLA,Beijing100194)
Sea surface salinity is a key parameter in both climatology and oceanography fields.L-band microwave remote sensing had been a useful method for monitoring the sea surface salinity.This article reviews the research progress of the existing sea surface salinity probe technology based on microwave remote sensing including dual-band probe technology,L-band passive probe technology and L-band active and passive combined probe technology and focuses on the brightness temperature correction technology,retrieval algorithms and calibration technology.Besides,a new sea surface salinity probe technology based on GNSS-R technology is introduced.At last,the characteristics of different sea surface salinity probe technology are summarized and compared and suggestions of future sea surface salinity retrieval based on remote sensing are presented.
sea surface salinity;microwave remote sensing;probe technology;inversion algorithm;GNSS-R;salinity probe
10.3969/j.issn.1000-3177.2015.02.003
TP722.6
A
1000-3177(2015)138-0017-09
2014-03-21
2014-05-04
严明(1990~),男,硕士,主要从事海洋表层盐度卫星遥感方面研究。
E-mail:yanming625@foxmail.com
猜你喜欢
大气科学学报(2022年2期)2022-05-12
今日农业(2021年19期)2022-01-12
成都信息工程大学学报(2021年2期)2021-07-22
上海航天(2021年3期)2021-07-21
空间科学学报(2020年1期)2021-01-14
海洋通报(2020年2期)2020-09-04
空间科学学报(2020年3期)2020-07-24
雷达学报(2018年3期)2018-07-18
中国光学(2015年5期)2015-12-09
中国地震(2015年1期)2015-11-08