小型电动垂直起降飞行器推进系统性能分析*
2015-03-09 01:22侯中喜汪文凯
国防科技大学学报 2015年3期
王 波,侯中喜,汪文凯
(国防科技大学航天科学与工程学院,湖南长沙410073)
相对于固定翼飞行器而言,垂直起降(vertical takeoff and landing,VTOL)飞行器能够在自身动力系统的作用下完成垂直起降,不再依赖于跑道或者复杂的弹射、回收装置,适合在城市街区、前线阵地和灾害现场等复杂环境下执行各种飞行任务。独特的空中定点悬停能力,使得VTOL飞行器在空对地的搜索、侦查和监视等任务领域的优势十分明显。
微小型无人VTOL飞行器重量轻、体积小、成本低,使用和维护方便,安全性高,复杂空域中的任务执行能力突出,具有较好的市场需求和应用前景。2011年福岛核事故和2014年云南地震的现场勘察和救援过程中都使用了小型四轴VTOL飞行器;俄亥俄大学设计了搭载有激光雷达导引系统的四轴VTOL飞行器,可在没有惯性导航和卫星导航的情况下穿梭于城市街道[1];美国航空航天局计划在金星和火星的探测活动中采用VTOL飞行器[2]。
VTOL飞行器中,技术相对成熟,且适合进行小型化、无人化设计的主要是单轴或多轴直升机,以及尾坐式飞行器[3]。基于重量、体积、成本和噪声等方面的约束,以及可行性、复杂性、安全性和模块化设计等方面的考虑,微小型VTOL飞行器常采用BEMP(Battery,Electronic speed control,Motor and Propeller)推进系统,该系统一般包括电池、电调、无刷直流电机和定距螺旋桨。和其他微小型飞行器一样,小型VTOL飞行器目前面临的主要问题之一是续航能力严重不足[4]。一方面,与固定翼飞行器相比,此类飞行器的负载能力相对较小,除去有效载荷占掉的部分,有限的能源载荷难以支撑长时间的飞行;另一方面,这种依靠桨盘承载重量的飞行方式,其效率要明显低于翼载飞行,滞空状态下,相同重量情况下的能耗要高得多。为了简化分析过程,本文的续航和滞空专指悬停飞行。
随着储能电池技术的发展、电机的集成设计与性能提升、高效率螺旋桨设计技术的发展,BEMP推进系统的效率正在不断改善,飞行器的续航能力也在不断提升。然而,BEMP推进系统内各部件的可选择性较大,各部件之间、BEMP系统与飞行器平台之间的相互制约关系和匹配规律还不是很明晰,推进系统的性能亟待提高。
文献[5]分析了电池参数对小型固定翼电动无人飞行特性的影响,研究了该类飞行器总体参数确定方法;文献[6]在直升机性能评估方法的基础上,分析了电动推进系统参数对电动直升机性能的影响。文献[7]利用经验公式建立了电动推进系统的数学模型,并通过实验对推力、功耗和电流的计算结果进行了验证,但是没有对推进系统的参数影响规律进行分析。文献[8]统计分析了无刷直流电机的模型参数,开展了固定翼电动无人飞行器推进系统的多学科优化设计,在一定的约束条件下同步优化电机、电池和螺旋桨的参数以获得预期的性能指标,对固定翼电动飞行器的推进系统设计有很好的指导意义;然而这种直接优化不能明确地描述各部件、各参数之间的物理制约关系。文献[1]设计了四轴VTOL飞行器的BEMP推进系统,重点针对各部件的功率损耗进行了建模,得到了续航时间的评估方法并开展了试验;虽然系统模型和设计结果的可信度均较高,但参数的作用规律并不明显,因此往往不能得到最佳的推进系统。
本文旨在分析BEMP各部件参数对续航性能的影响规律和参数的协调方法,研究BEMP系统各部件之间的匹配问题,重点分析电池放电能力对VTOL飞行器悬停性能的影响。
1 BEMP推进系统的数学模型
1.1 电池模型
电池是BEMP推进系统中质量占比较大的一部分,文献[8]针对11个不同生产厂商的LiPo电池(组)的统计结果显示,“质量mB-能量EB”关系为:

其中ξ=0.015 5。当BEMP推进系统采用不同厂商、类型的锂电池时,该质量-能量统计规律可能会不尽相同。本文对小型无人机和航模常用的LiPo电池组(mB〈2kg)进行了统计,针对AKE,Kokam等公司152款电池“质量-能量”“质量-允许功率”的分析结果如图1、图2所示。
从图1中可以得到电池“能量-质量”的变化规律:

图1 小型LiPo电池(组)能量密度Fig.1 Specific energy density of small LiPo batteries
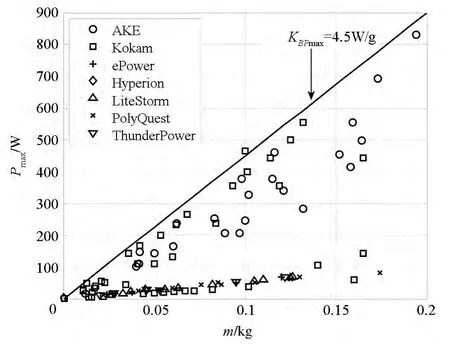
图2 小型LiPo电池(组)的功率密度Fig.2 Specific power density of small LiPo batteries

其中,KBEm为能量密度,单位为Wh/kg,即单位质量电池(组)所具有的有效电能量,是衡量储能电池性能的重要指标之一。不同厂商、类型的锂电池,KBEm有差异;但是当电池组的总能量EB〈100Wh时,各电池组的能量密度差异相对较小。基于当前技术的平均水平,本文保守取KBEm=150Wh/kg。
由于功率密度并不是所有电池设计所追求的性能指标,因此没有明确的统计规律,然而每块电池的最大允许功率密度仍然受技术水平的限制。
从图2中可以发现,LiPo电池(组)质量mB与最大允许功率Pmax之间的约束关系为:

其中,KBPm为电池的功率密度,U,I分别为电池的端电压和最大允许持续工作电流,KBPmax为最大功率下的电池功率密度,约等于4.5W/g。若电池组的节数为ncell,则名义端电压为:

而电池的容量为

1.2 ESC电子调速器
ESC将电池的直流电压转换成三相交流电,并通过调制信号的脉宽来改变相电压,从而控制电机的转速。一般情况下,ESC的质量在BEMP系统和整机中的占比均较小,但对于小型甚至是微型飞行器而言,这部分质量仍是不可忽略的。
分析发现,电调质量主要取决于允许的最大持续工作电流,同时也受生产工艺和厂商等因素的影响。统计Scorpion,Hacker和JETI三种总计95款电调,结果显示,其最大允许工作电流Ilim与质量mE大致呈如图3所示线性关系。
当允许电流Ilim〈60A时,Ilim-mE的线性关系较明显。若定义电流系数KEIm(A/kg),则有

而对于大电流电调,各厂商之间、同一厂商的不同型号之间,电调的质量特性差异均较大。本文暂且取电调质量模型KEIm=1×103A/kg。

图3 电调质量与允许电流之间的关系Fig.3 Relationship between the maximum permissible current and ESC
1.3 无刷直流电机模型
电机是BEMP系统中将电能转换成机械能的关键部件,质量占比相对较大。无刷直流电机允许的最大持续输出功率与电机的质量/尺寸之间存在正比例线性关系[8]:

式中,KMPm为电机的功率密度。文献[8]将市面上的无刷直流电机分为高压大扭矩电机、高效率商用电机和小型高功率密度电机三类,其分析认为110W/kg〈KMPm〈800W/kg。由于小型无人机承载能力和运行功率较低,所以大多采用效率较高的第三类电机。市面上大多数的现货供应产品,几乎都会标识15s或者60s最大运行功率,而实际使用短则几分钟,有时长达数十分钟。因此标识的最大持续功率只能作为选型的一个参考。
飞行器的设计过程中,可将电机的功率密度作为设计变量。而在部件选型阶段,则需要根据实际情况选择合适的电机型号。需要高转速还是大扭矩,则需要结合电机的KV,KT值。
1.4 微小型定距螺旋桨模型
对于待评估的VTOL飞行器,若已知螺旋桨的桨叶数目NB、桨叶直径D和桨毂直径D0,距离桨轴r处的叶素弦长b(r)、叶素安装角θ(r),以及叶素翼型的升力系数CL(α,Re)和阻力系数CD(α,Re),则可利用动量叶素组合理论(Blade Element Momenturm Theory,BEMT)求解特定转速Ω时的悬停推力T、转矩M和需用功耗P等参数。悬停工况下,桨叶径向r处叶素微段dr的受力分析和气流速度如图4所示:V a,V t分别为轴向和切向的诱导速度;W,V i分别为气流的相对速度和绝对速度;dT,dF分别为轴向推力和切向阻力。
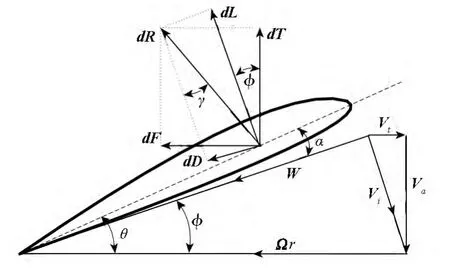
图4 悬停工况下的叶素受力分析Fig.4 Force analysis of blade element under hover propeller condition
图4中,γ=arctan(CD/CL)为阻升角;φ,α分别为当地入流角和实际迎角,且有

则可由动量理论和叶素理论分别得到作用在该叶素上的推、阻力为
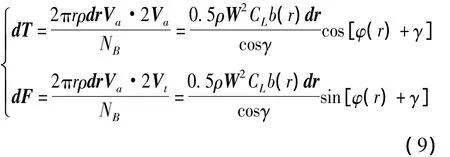
简化式(9)可得

利用牛顿迭代法或者二分法求解式(10),得到入流角φ=φ(r),从而可以求得诱导速度值:

然后通过积分可以得到螺旋桨的推力和功耗:
计算过程中,升力系数CL(α,Re)和阻力系数CD(α,Re)可通过翼型的气动数据表插值获得,但是计算相对烦琐。
为了简化计算流程,本文采用了升阻力的极曲线描述方式,并以r0=3D/8处叶素的弦长和雷诺数作为参考。小型定距螺旋桨大多采用NACA-4412翼型、Clark-Y翼型,或者是两种翼型的改进型,其升阻力可近似描述为

式中,升力线斜率CLα=2π,翼型的零升阻力和零升迎角C D0,α0需要根据桨叶和实际工况的雷诺数确定,而e=1.78(1-0.045λ0.68)-0.64为Oswald形状因子,其中λ=0.5D/b(r0)。针对商用Master Airscrew 14×7三叶定距螺旋桨(实验桨)开展计算,推力和功耗的估算结果与文献[9]中试验数据的对比如图5、图6所示,两者吻合较好。
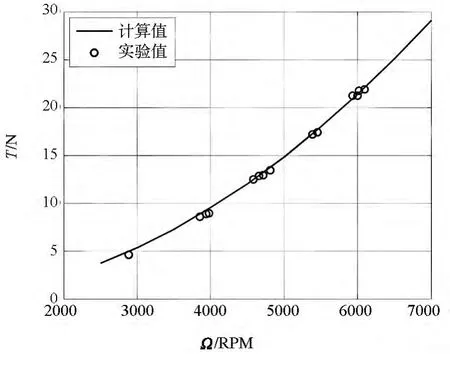
图5 实验桨的转速推力关系Fig.5 RPM-Force of the sample propeller
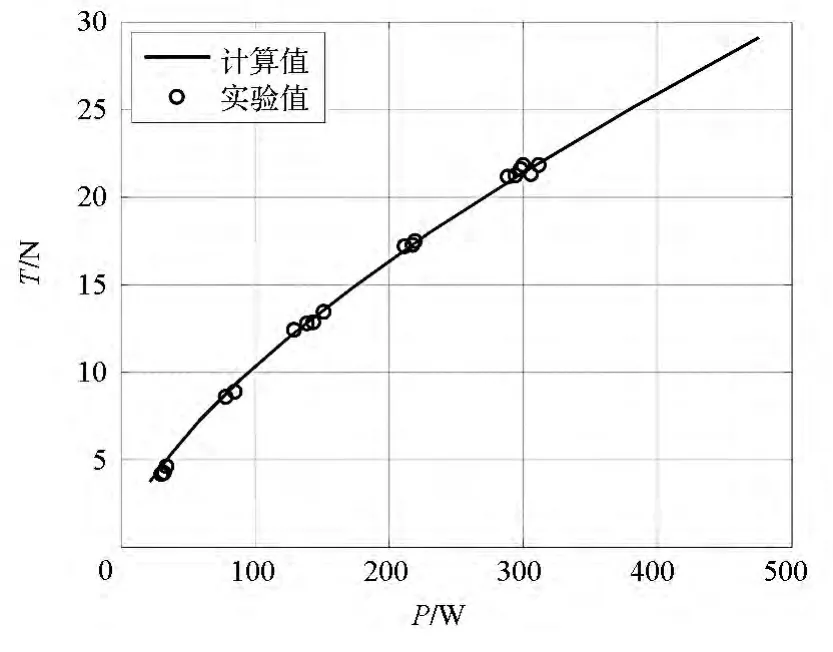
图6 实验桨的功耗推力关系Fig.6 Required power-Force of the sample propeller
2 推进对VTOL飞行器续航性能的影响
2.1 VTOL飞行器的续航时间
VTOL所用BEMP推进系统的质量模型:

若机体的结构质量为m0,则悬停需用推力为

其中,Km为悬停推力修正系数,考虑滑流的吹风增重和安全余量等因素,取Km=1.05,g为重力加速度。利用前文所述方法得到需用功率Preq,并使其满足电机和电池的功率约束、电调的电流约束:
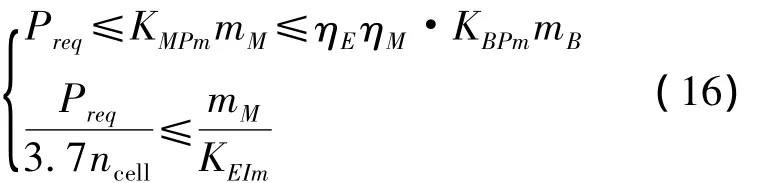
式中,ηE,ηM分别为电调和电机的功率传递效率。求解过程中,近似认为电机和电调的效率为常值,即有电池的放电功率为

式中Pact为实际功率。若不计电池的压降,利用电池的恒流放电模型,即可得到悬停滞空时间t:

其中,C0,I0,t0分别为电池的标称容量、参考放电电流和与之对应的放电时间,一般商业锂电池的t0=1h。VTOL飞行器续航时间的详细计算流程如图7所示,其中kg=gKm。
2.2 电池尺寸对续航性能的影响
利用前文所述的方法,分析某小型电动VTOL无人机的续航性能并评估其载荷能力。该无人机采用Master Airscrew14×7三叶定距螺旋桨推进,不含BEMP推进系统和载荷的空重约1.4 kg。近似认为电机和电调的效率分别为常值0.9,0.95,分别取电机的功率密度为KMPm=400W/kg,800W/kg,电池容量对续航性能的影响如图8、图9所示。
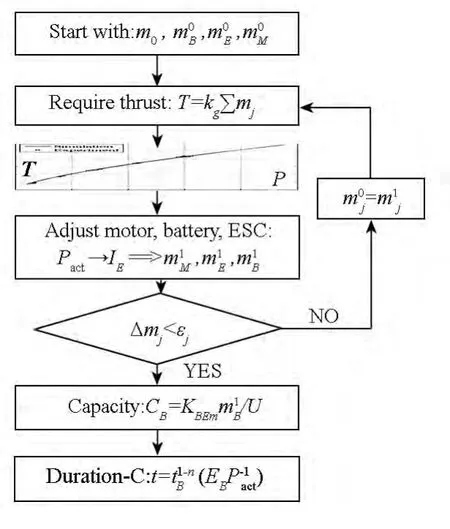
图7 续航时间的计算流程Fig.7 Flow of duration estimation

图8 续航时间随电池尺寸的变化(KMPm=400W/kg)Fig.8 Relation between duration and battery size(KMPm=400W/kg)
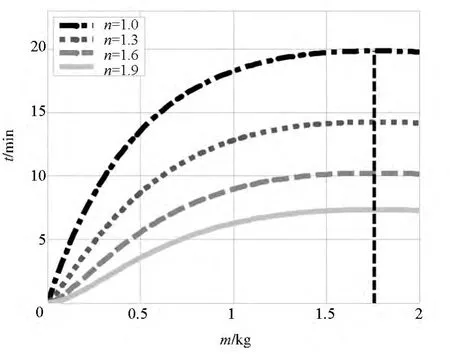
图9 续航时间随电池尺寸的变化(KMPm=800W/kg)Fig.9 Relation between duration and battery size(KMPm=800W/kg)
从图8、图9中可以发现,当增大电池的尺寸以增加电池容量时,飞行器的续航时间先增大后减小,最长续航时间对应的电池质量如图中虚线所示。究其原因,电池尺寸增大必然导致BEMP系统重量增加,从而需要更大的悬停功耗,因此电机、电调的质量也会增加,进一步增大了BEMP系统的重量;由于推力-功率存在如图6所示的非线性关系,功耗的快速增加导致了续航时间缩短。
电机的质量是影响续航性能的主要因素之一,由式(18)可知,当电机功率密度增大一倍时电机质量减半,但可以使最大续航时间延长至原来的2.34倍。对于相同的电池容量,不同的放电系数n对应的电池可用电量不同,续航时间随着n增大而减小,在最佳电池质量处差异尤为明显。与此同时,随着n增大,电池尺寸对续航时间的影响会愈加明显。
2.3 电池能量密度对续航性能的影响
由前文中电池质量对续航时间的影响规律知,若电机功率密度和电池能量密度分别为KMPm=800W/kg和KBEm=150Wh/kg时,取最佳的电池质量1.84kg且电池完全放电(n=1)的最长续航时间仅为19.62min,随着电池技术的进步KBEm会逐渐增大,其对续航时间的影响如图10所示。
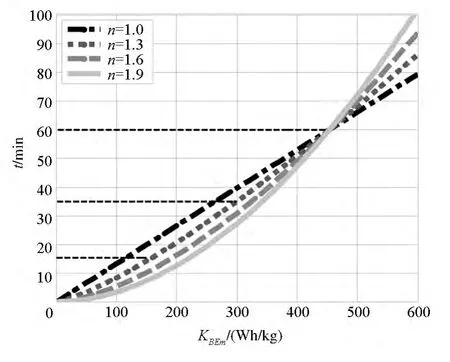
图10 电池比能量对续航性能的影响Fig.10 Influences of battery specific energy on duration
对常见n=1.3的LiPo电池,当电池的功率密度KBEm=150Wh/kg,300Wh/kg,450Wh/kg,飞行器的续航时间分别为15.45min,34.98min,58.91min。电池比能量越高,续航时间的提升效果越显著。对于放电系数n越大的电池,其提升效果比能量对续航能力提升更明显。当454Wh/kg时,式(18)中的EB/PB=1h,此时的续航时间t与放电系数n无关;当时,理论上n越大续航时间越长,但实际上可能会受电池放电能力的影响。
2.4 电机功率密度对续航性能的影响
当电机的功率密度为KMPm=400W/kg时,最佳的电池质量为0.76 kg,图8所示无人机的最长续航时间仅为8.63min,其主要原因是电池的功率密度太低。在相同的电池质量和能量密度条件下,增大电机功率密度,续航时间变化规律如图11所示。
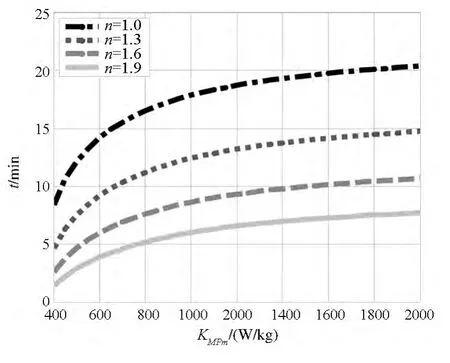
图11 电机比功率对续航性能的影响Fig.11 Influence of motor power density on duration
从图中不难发现,当电机功率密度较低时(KMPm〈800W/kg),KMPm增大对续航性能提升效果明显;然而,当KMPm〉1400W/kg时,增大KMPm对续航性能影响不大。放电系数n越小的电池,电机功率密度的这种影响越显著。
3 VTOL无人机的负载续航性能
以锂聚合物电池为例,n=1.3,选择电机的功率密度为KMPm=800W/kg时,最佳的电池质量为1.84 kg,电池能量密度参照当前的一般技术水平KBEm=150Wh/kg,分析该无人机的续航时间和带载荷续航性能。若无人机的有效载荷质量为mPL,则有效载荷率PLP为

为了评估飞行器搭载有效载荷的续航性能,即载荷质量和续航时间的综合评价指标,分别设续航时间因子PLD和续航功率因子PLDP,其表达式为
结果如图12、图13所示,当载荷质量从零逐渐增加到5 kg的过程中,续航时间逐渐缩短;有效载荷率、负载续航时间因子和负载续航功率因子均是先增大后减小,PLP在4.2kg处取最大值0.31,PLD和PLDP分别在1.95kg和0.98kg处取最大值。
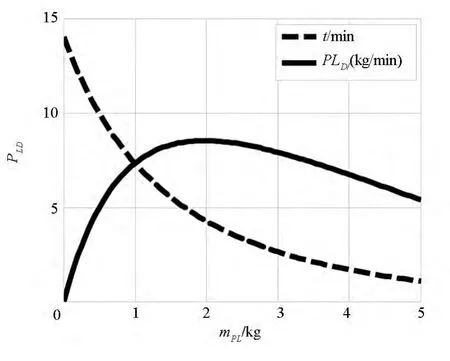
图12 载荷质量对续航时间和续航时间因子的影响Fig.12 Influences of payload mass on duration and PLD
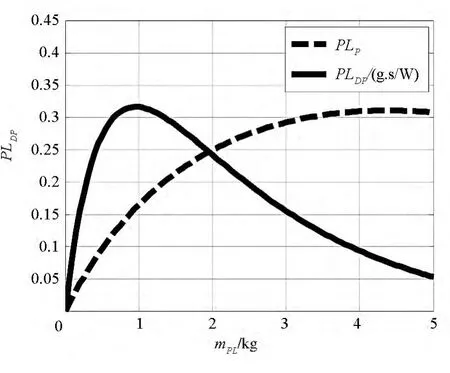
图13 载荷质量对有效载荷率和续航功率因子的影响Fig.13 Influences of payload mass on PLP and PLDP
由此可以发现,若不考虑续航的经济性(即功耗水平),搭载2 kg左右的载荷可以获得最佳的负载续航性能;而考虑功耗的最佳负载续航工作点为mPL≈1kg。当载荷质量从零增加到5 kg时,BEMP系统运行时的功率接近6 kW,对飞行器结构强度和BEMP系统的散热带来极大的挑战。因此,负载续航性能随载荷变化规律的使用必须结合实际约束。
4 结论
使用BEMP系统推进的VTOL飞行器,其续航性能是电池尺寸、能量密度、放电深度、电机功率密度和螺旋桨悬停效率等因素综合作用的结果。其中,电池的能量密度是影响续航时间的主要因素,而电机功率密度太小会严重制约飞行器的续航性能,且电池参数优化对续航性能的提升受限于电机的功率密度。鉴于当前的技术水平,小型VTOL飞行器依靠桨盘承载重量的飞行方式,仅能支撑十几分钟的悬停飞行,很难在抢险救灾、火星探测等应用背景下完成长达数小时的飞行任务。因此,一方面需要提升BEMP的综合性能;另一方面需要改变VTOL飞行器的滞空方式,如设计兼具垂直起降和高效水平翼载飞行能力的混合模式飞行器。
References)
[1]Stepaniak M J,Van Graas F,De Haag M U.Design of an electric propulsion system for a quadrotor UAV[J].Journal of Aircraft,2009,46(3):1050-1058.
[2]Young L A.Vertical lift-not just for terrestrial flight[C]//Proceedings of AHS/AIAA International Powered Lift Conference,Arlington,2000.
[3]Bouabdallah S,Murrieri P,Siegwart R.Towards autonomous indoor micro VTOL[J].Autonomous Robots,2005,18(2):171-183.
[4]Langelaan J W,Roy N.Enabling new missions for robotic aircraft[J].Science,2009,326(5960):1642-1644.
[5]刘斌,马晓平,王和平,等.小型电动无人机总体参数设计方法研究[J].西北工业大学学报,2005,23(3):396-400.LIU Bin,MA Xiaoping,WANG Heping,et al.Design analysis methodology for electric powered mini UAV[J].Journal of Northwestern Polytechnical University,2005,23(3):396-400.(in Chinese)
[6]聂资,陈铭.电动直升机飞行性能计算和分析[J].北京航空航天大学学报,2012,38(9):1139-1143.NIE Zi,CHEN Ming.Calculation and analysis of electricpowered helicopter flight performance[J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(9):1139-1143.(in Chinese)
[7]陈军,杨树兴,莫雳.电动无人机动力系统建模与实验[J].航空动力学报,2009,24(6):1339-1344.CHEN Jun,YANG Shuxing,MO Li.Modeling and experimental analysis of UAV electric propulsion system[J].Journal of Aerospace Power,2009,24(6):1339-1344.(in Chinese)
[8]Gur O,Rosen A.Optimizing electric propulsion systems for unmanned aerial vehicles[J].Journal of Aircraft.2009,46(4):1340-1353.
[9]Radhak A.An experimental investigation of ground effect on a quad tilt rotor in hover and low speed forward flight[D].USA:University of Maryland,2014.
猜你喜欢
车主之友(2022年6期)2023-01-30
车主之友(2022年4期)2022-08-27
凤凰动漫(军事大王)(2022年1期)2022-04-19
军民两用技术与产品(2021年5期)2021-07-28
红外技术(2021年1期)2021-01-29
当代陕西(2019年15期)2019-09-02
环境与生活(2018年5期)2018-09-10
电子制作(2018年2期)2018-04-18
火控雷达技术(2016年3期)2016-02-06
小朋友·快乐手工(2015年5期)2015-06-06