
基于区域多次回波点密度分析的城区LiDAR建筑物提取
2015-03-09 11:20李乐林江万寿郭程方
自然资源遥感 2015年2期
李乐林, 江万寿, 郭程方
(1.湖南科技大学地理空间信息技术国家地方联合工程实验室,湘潭 411201;2.武汉大学测绘遥感信息工程国家重点实验室,武汉 430079;3.柳州铁道职业技术学院建筑技术学院,柳州 545007)
基于区域多次回波点密度分析的城区LiDAR建筑物提取
李乐林1, 江万寿2, 郭程方3
(1.湖南科技大学地理空间信息技术国家地方联合工程实验室,湘潭 411201;2.武汉大学测绘遥感信息工程国家重点实验室,武汉 430079;3.柳州铁道职业技术学院建筑技术学院,柳州 545007)
以正确提取城区LiDAR点云中建筑物为目标,综合利用不同类别目标点云的回波特征以及地形信息,提出了一种基于区域多次回波密度分析的LiDAR点云建筑物提取方法。首先,将点云构建不规则三角网(triangulated irregular network,TIN),获取封闭的等高线;然后,利用等高线间的拓扑关系得到等高线族区域;最后,统计每一区域的多次回波点云密度信息,通过建筑物和树木区域多次回波点云在区域密度上的巨大差异来识别建筑物点云和树木点云。研究结果表明:该方法既充分利用了建筑物表面与植被间多次回波特性的差异,又不否定建筑物边缘同样存在多次回波的现象;通过封闭的等高线自适应地检测出地物目标的轮廓,弥补了传统LiDAR建筑物提取方法的不足;该方法能够较其他方法更准确地提取建筑物。
LiDAR;数学形态学;点云分类;等高线族;区域多次回波点密度
0 引言
随着机载激光雷达(LiDAR)技术的发展,快速获取大片区域数字表面模型(digital surface model,DSM)在技术上已经不是难题,但是如何从这些大量的离散LiDAR点云中准确获取所需信息,如DEM提取,建筑物点云、树木点云的分类与建模等,成为了当前研究的热点问题。目前国内外已有大量学者在DEM提取方面做了相关研究,提出了许多效果显著的算法,地面点和非地面点的分类精度也较高。Sithole和Vosselman[1]对这些算法做了详尽地总结和对比。但是将非地面激光点云进一步分为建筑物和植被等的研究还不够深入。大部分学者利用穿透植被的激光点云存在回波差异的特性来对树木进行分类。其中单次回波多发生在地面或接近树冠的部分;而在多次回波中,首次回波大多为接近树冠部分的反射信号,末次回波一般是较树冠低一些的枝叶或地面的反射信号。有的学者仅利用首次回波点云数据提取树木区域[2],或者仅利用末次回波点云数据过滤掉大部分树木信息,来达到提取建筑物的目的[3]。虽然该类方法有助于提取所需的单方面信息,但是首次回波和末次回波中都会同时有建筑物和植被点云,它们没有被正确地分类,也没有全部得到利用;也有学者利用多次回波或首末次回波的高程差来区分建筑物点云或植被点云[4-5],但该方法也忽略了在建筑物边缘存在多次回波现象以及具有层次结构的建筑物边缘点云存在很大高程差现象,结果必然导致建筑物边缘精度的丢失和部分建筑物边缘点云被错误分类为植被点云。
除了利用点云的回波特性之外,有些学者利用不同材质属性(如建筑物和树木)导致的不同回波信息强度来进行分类[6],但不同的植被之间和建筑物之间,甚至不同地域的植被回波强度信息都是不一致的,并不能用一条很明显的界线将它们有效地分割开,该方法适应性较差;也有学者利用建筑物区域和树木区域的粗糙度[5]、区域梯度的一致性[7]、对象区域内的三角网坡度信息熵大小[8]、对象目标的几何特征[9]以及大坡度值[10]来区分建筑物点云和植被点云,但区域的确定需要不断地迭代增长,过程繁琐冗余;还有学者[11]基于一些先验知识,如本地区房屋的面积大小等,利用闭合等高线区域面积的大小来粗略提取建筑物区域,分离树木和局部突起的地形点,但在复杂的城市环境中,树木可能成片集中或以单株树木出现,建筑物、植被及局部地形区域的大小同样不存在显著的分割点;此外,还有可能建筑物与树木相伴,此种情况下等高线将同时包括建筑物和树木区域,所以该类方法的适应性还有待验证。
除了利用机载LiDAR获取的点云数据来提取建筑物,还有部分学者通过融合LiDAR点云和影像数据来进行建筑物的提取与三维重建。有的学者利用LiDAR数据点集的边界来定位卫星图像上的感兴趣区域并提取关键提示线来实现屋顶的分割,从而得到属于每个建筑物的屋顶点[12];也有学者利用多源数据产生的各种信息建立分类规则并实现基于面向对象的地物分类[13]; 还有学者以提取后的建筑物机载LiDAR数据和配准后的航空影像为基础,通过结合从LiDAR点云提取建筑物的粗糙轮廓以及从影像上提取精确的建筑物特征线来得到建筑物的外轮廓[14]。一方面,通过融合LiDAR数据和影像数据能够提供更多的有用信息,以此来提高分类精度,但同时也增加了建筑物提取的难度,因为在这种情况下,LiDAR数据和影像需要进行精确配准才能达到精确分类的目的。
总体来讲,这些已有的算法虽然能够将大部分点云准确地归类为地面、植被和建筑物点云等,但是均存在一定的不足,甚至对后续研究造成了一定影响。本文提出的建筑物和植被点云分离的算法中,首先基于数学形态学滤波方法将LiDAR点云分离出地面点和非地面点,然后利用等高线获取不同目标区域的地面点云,同时利用植被区域和房屋区域多次回波点云在密度上的巨大差异来识别该建筑物点云和植被点云。该方法既承认了建筑物表面与植被间多次回波特性的差异,又不回避建筑物边缘同样存在的多次回波现象,是通过封闭的等高线自适应地检测出地物目标的轮廓,因而能够较其他方法更准确地对LiDAR点云进行分类。
1 研究方法
激光穿透性导致多次回波现象不仅发生在植被区,同样也发生在建筑物边缘,但地表不存在这种现象;森林和植被区域的多次回波点密度明显高于建筑物区域。图1为某一植被茂密的城镇区域的原始点云及其多次回波点云。

图1 原始点云(左)及其多次回波点云(右)Fig.1 Raw point clouds(left) and point clouds with multi-return(right)
从图1(右)可以看出,植被区域有着高密度的多次回波点,建筑群仅在边缘地区存在少量的多次回波点。关于建筑物和植被点云分离的问题可以分解为2个:①地物目标区域的正确划分;②选择显著性特征,对非地面点云有效地进行分类,该最优特征应与尺度、面积大小无关。
经过点云滤波后地面点已得到正确标记,如果能够将地面凸出物区域正确地提取出来,再选择与多次回波点有关的最优特征对地面凸出物区域进行分类,则该区域建筑物与植被点云的分类将变得十分明确。本文基于区域的多次回波点云密度分析的LiDAR点云建筑物提取算法可以用图2来描述。

图2 LiDAR点云分类算法流程Fig.2 LiDAR point clouds classification algorithm flow
1.1 分离地面点
基于机载LiDAR点云滤波方法主要包括基于数学形态学[15]、梯度[16]、线性预测[17]、TIN的迭代滤波[18]、区域增长[19]以及聚类分析[20]的方法等。通过这些方法大多情况下都可获得较好的地面点和非地面点的初始分类,但各自又有一些缺陷,如:
1)基于线性预测的最小二乘滤波中由于分块大小固定,当块的大小设置不当时,或无法完全剔除城区的房屋数据,只能削去房顶棱角,或过度地削掉地形特征,其结果取决于分块方式的科学性和地形结果形态的适应性;在森林和城镇地区,当地面点占整个数集的比例比较少时,很难得到准确的地面。
2)基于不规则三角网(triangulated irregular network,TIN)滤波方法中由于需设置多个参数(如高程差、角度及边长等),阈值自适应选取是一个问题,同时过滤灌丛或低矮地面物体时该算法容易过滤掉地形起伏相对剧烈的地面点,产生过滤误差。
3)基于梯度算法中,计算相异2点间的坡度值或高差,当坡度值或高差超过设定的阈值时,就认为较高点是地物,这种理论的基础是假设陡坡只会出现在地物数据集中,显然该假设不太可靠。
4)基于数学形态学的滤波方法与其他算法一样,对于陡坡等复杂地形的处理均存在问题,但该方法可以基于格网执行,计算效率高。
本文在分离地面点过程中采用了基于数学形态学的滤波方法。数学形态学基本思想是用与原始图像在尺寸和形状上都有相关性的“结构元”在原始图像中添放,探测图像集合结构,获得原始图像的尺寸、形状、连通性、凹凸型、平滑性以及方向性等信息。数学形态学“结构元”窗口分析的基本运算有腐蚀运算、膨胀运算、开运算和闭运算,在LiDAR点云的滤波分析中,地面点的提取一般采用开运算,同时达到分离非地面点的效果。
图3为采用多级窗口的数学形态学方法滤波后对图1(左)中的点云数据进行地面点云和非地面点云分类的结果。滤波效果较理想,树木、植被和房屋均被正确地划分为非地面点云。
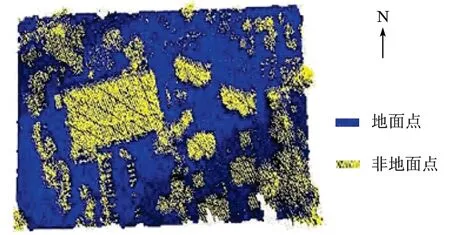
图3 地面点云与非地面点云分类结果Fig.3 Classification results of terrain point clouds and off-terrain point clouds
1.2 地物目标区域获取
基于已有的研究[21-22],将原始点云构成TIN后获得的闭合等高线能够很好地反映该区域的地表形态;树木和建筑物区域先将等同于地形来对待,只有通过后续的多次回波点密度的分析才能将其正确识别出来。所有的闭合等高线通过拓扑分析将被聚类成不同的等高线族[22],每1个族代表了不同的地物目标或同一目标的不同层次,每一族中最低高程等高线所囊括的范围即为该地物目标的所属区域。等高线的拓扑聚类过程主要分2步:
1)构建等高线树。利用一个树形结构,基于等高线在平面位置上的叠合、相离关系以及在高程方向上的上下关系可以将各闭合等高线连接成一个等高线树。具体为每一条闭合等高线为树中的一个节点,其父节点为下一高程面上与之在平面位置上存在嵌套或叠合关系的闭合等高线; 同理,其子节点为上一高程面的与之在平面位置上存在嵌套或叠合关系的闭合等高线。每一节点只存在唯一的父节点,但可有多个子节点。等高线树构建可以按照由底至顶的顺序构建,也可按照由顶至底的顺序构建。树根节点为一虚拟的节点,代表大地面。图4为假想的地物目标及构建的等高线树。
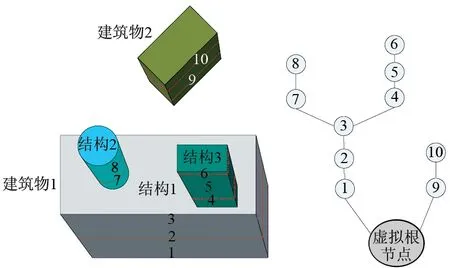
图4 假想地物目标及其等高线树Fig.4 Supposed objects and its corresponding contours tree
从图4可知,对于同一栋建筑物,等高线生成过程中,设置不同的间距大小将在垂直方向上产生不同的等高线,进而导致不同间距情况下同一栋建筑物的等高线族包含不同的等高线。生成等高线族的目的主要是为了解析建筑物的层次结构,单一等高线族内等高线条数的多少在此处并无多大影响,但为了能够将建筑物不同层次的结构正确区分开来,需要确保每一个层次结构至少有一条等高线存在,通常选取1 m作为等高线间距来生成等高线。
2)等高线树剪枝。剪枝过程即为分族过程,剪枝结果便是各等高线族。具体步骤为从根节点开始遍历等高线树,每一节点及其单一子节点聚合为同一等高线族,若碰到有多个子节点则该等高线族聚合结束,从子节点开始重新聚合新的等高线族,直至遍历完所有节点。生成的等高线族通过该族的首节点便可以找到其父节点所在族,亦即新族和父族的拓扑关系仍然保留下来。通过剪枝过程得到了不同的等高线族,同时也建立了一棵等高线族树。图5(左)为图4中的等高线树进行剪枝后得到的等高线族,不同族等高线以不同的颜色进行区分,图5(右)为相应的等高线族树。
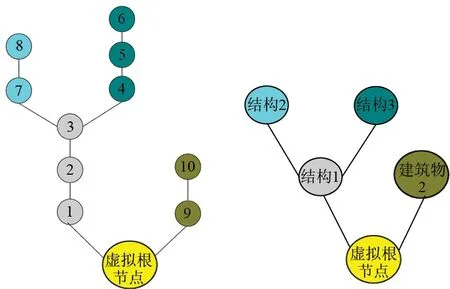
图5 等高线树剪枝结果(左)及其相应的等高线族树(右)Fig.5 Pruning results of the contours tree(left) and tree of contours clusters(right)
1.3 非地面点分配
区域确定后,所有的非地面点云将被分配到不同的等高线族中。以族为单位进行点云分配,遍历等高线族树,分割过程从等高线族树的叶子节点开始,每一族内的点云分配具体过程为:①取每一族的最低高程等高线为该等高线族的区域边界;②计算该等高线的外接矩形,基于该外接矩形搜索点云格网;③搜索格网内的非地面点云,按点在多边形内的判定方法判断点是否落入该等高线族区域内。若点在多边形内,则将该点编号保存到等高线族的点云容器中,同时标记该点为已分配点。区域中可能存在落入2个或者更多族中的点,如果已分配并标记过的点再次落入多边形内,该点便不再分配到其他族中。
该方法解决了点云分割过程中的区域自适应问题,分类精度更好,而且分割过程无需迭代,简单易行。由于在等高线生成过程中,并不是所有的植被点云(如低矮的植被)都能够生成闭合等高线,且本文已将面积小于10 m2(一般建筑物的面积≥10 m2)的闭合等高线过滤掉,所以,没有被选入任何一等高线族的非地面点将被分类为低矮植被。
1.4 区域多次回波点密度
区域确定后,所有非地面点分割完毕,其中包括了单次回波点云以及多次回波点云。图6是图1数据得到的各等高线族,图中不同的等高线族用不同的颜色进行区分。

图6 等高线族区域Fig.6 Regions of the contour clusters
为了将植被点和建筑物点有效划分开,选用一个显著特征量,要求2类点云的特征值差异必须明显。本文将区域多次回波点密度作为划分标准,这是因为:①由于激光的穿透性,植被区域多次回波点较多且较均匀地密集分布于植被区域;②建筑物区域多次回波点稀少且只发生在建筑物边缘,建筑物区域的多次回波点数量和植被区域的多次回波点数量不在同一个数量级上。鉴于此,综合利用回波点数和空间体积元素,将区域多次回波点密度Dmr选作特征量,即
Dmr=Nmr/V
(1)
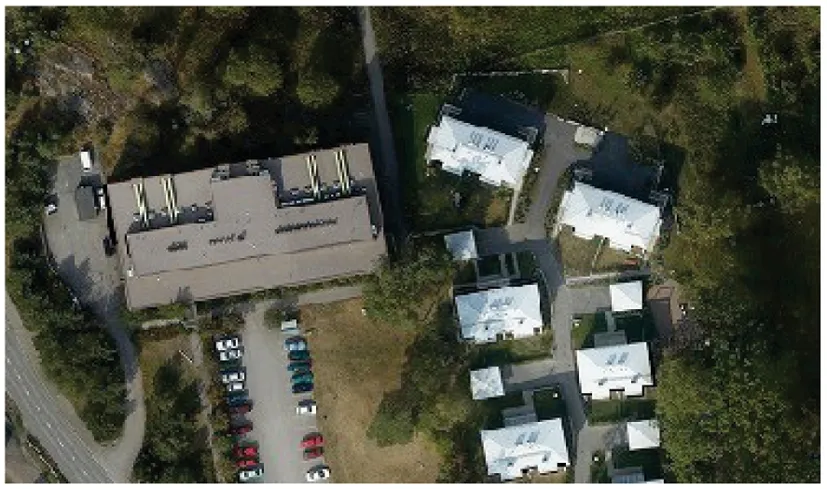
式中:Dmr为单位体积内多次回波点的点数,即多次回波点密度;Nmr为该区域范围内所含的多次回波点的点数(单次回波点除外);V为该区域的体积,可通过该区域的面积与该族等高线最小高程与最大高程之差求出。假定存在一阈值TDmr,当Dmr 只要机载LiDAR系统能够记录激光脉冲的2次及以上的多次回波数据,便可求出所选区域的Dmr,进而作为建筑物和植被点云分离的统计量。现有LiDAR系统已能够记录到激光脉冲的多次回波信号,如Leica ALS50-II系统和Optech ALTM-3100EA 系统都可记录到激光脉冲的4次回波信息。由于激光在树木和植被区域具有穿透特性,若回波记录数越多,则植被区域所获得的多次回波点云数量将越大,植被区域的多次回波点云密度值也将越大;建筑物只在边缘产生少量的回波数据,因此建筑物区域的多次回波点云密度几乎没有变化,这将更加有利于建筑物和植被点云的分离。 当计算出某一等高线族区域的Dmr后,便可依据TDmr判定该区域为建筑物或植被。通常情况下只需一次计算便可以确定点云分类属性,完成划分。但在城区环境下,特别是住宅区,可以经常看到树木和房屋相互交叉在一起,甚至覆盖到屋顶之上,造成这2种目标点云在平面空间分离存在难度。该情况在LiDAR点云生成的等高线上的直接反映就是建筑物轮廓线将穿过树木区域。如图6所示的建筑物1,其所属的蓝色等高线族便将其右下角的植被区域包围进来了,由此造成了建筑物轮廓线的不准确,但这并不影响建筑物点和植被点的分离;由于树木本身具有轮廓自封闭性,在该黄色等高线族之上将生成一个真正属于树木的小的等高线族,通过该小的等高线族区域的多次回波点密度分析,仍然可以将树木点和建筑物点正确区分开来。为此,在点云分类属性的确定过程中,一旦某点被某一等高线族确认为植被点,那么该点的分类属性则固定为植被属性,此后将不再改变。 若需要进行后续的应用处理(如建筑物三维重建),待经过区域多次回波点密度分析后,还需重新生成TIN,追踪等高线,生成一个相对准确的边缘。此次构建TIN过程中,只能利用地面点云和已提取出的建筑物点云,植被点云不再加入到TIN中。 为了找到将建筑物点云与植被点云进行分离的Dmr分割临近点,本文对一组植被比较茂密的建筑物区域进行试验。在该区域内随机选择25组等高线族作为样本并对各个等高线族区域的Dmr进行统计分析,确定Dmr分割阈值。该实验数据选自TerraSolid附带的示例数据Hut2000中植被与建筑物混杂比较严重的区域。图7所示为该区域内等高线族样本的Dmr统计结果。 图7 多次回波点密度统计Fig.7 Statistics of the regional multi-return point density 通过对图7进行分析,选定Dmr=0.05为植被区域与建筑物区域的分割阈值。图8(左)为选定阈值Dmr=0.05,将Dmr<0.05的等高线族区域判定为建筑物区域,将Dmr≥0.05的区域判定为植被区域后的非地面点云显示结果。图8(右)则为单独提取出的建筑物点云。可以看出,选定Dmr=0.05为植被区域与建筑物区域分割阈值是合适的。 图8 非地面点云分类显示(左)及其单独提取出的建筑物点云(右)Fig.8 Classification of the off-terrain point clouds(left) and extracted building point clouds(right) 由于缺少点云分类的参考数据,所以本文提出的算法无法通过官方数据得到验证,无法从定量分析的角度对本算法进行质量评价,但可以根据激光扫描飞行时获取的相应航片(图9)进行目视判断。 图9 测试区航空影像Fig.9 Aerial photo of the test region 从目视解译结果来看,本文提出的基于区域回波密度分析的点云分类算法分类结果较好,仅有一处低矮的附属物因紧邻高大树木而被误分为植被点云;植被茂密区域的建筑物点云和植被点云都被有效地分离开来,为下一步建筑物的重建和植被参数的估计提供了很好的分类结果。此外,本文对其他小类别点云没有再次进行细分,如图9中的小汽车点云在图8中被归类为低矮植被,但汽车类点云在城区环境中应是比较常见的类别,更精细的点云分类将是下一步的研究方向,同时本文提出的方法也有待于更多复杂地区的数据进行检验。 1)在形态学滤波算法基础上,从原始LiDAR点云数据中分离出地面点云和非地面点云;同时加入基于区域多次回波密度分析的点云分类思想,通过等高线分族方法自适应地获取不同地物目标的点云区域,统计该区域内的多次回波点密度,根据建筑物和植被在该特征上的显著性差异,选择了恰当的分割阈值将植被点云和建筑物点云从非地面点云中正确分类出来。 2)通过分析试验数据结果,表明该算法能很好地将LiDAR点云正确地划分为地面点云、植被点云和建筑物点云。 3)该分类方法中没有考虑其他特殊的分类,如电力线和汽车等。为此,还需要在此基础上做进一步研究。同时,国际组织ISPRS仅提供了LiDAR点云滤波的标准测试数据与参考数据,本算法无法通过官方数据得到验证,同时国际上以及国内科研机构在LiDAR点云分类方面也缺少相关的行业标准,无法给出定量的评价结果。 [1] Sithole G,Vosselman G.Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds[J].ISPRS Journal of Photogrammetry and Remote Sensing,2004,59(1/2):85-101. [2] 张齐勇,岑敏仪,周国清,等.城区LiDAR点云数据的树木提取[J].测绘学报,2009,38(4):330-335. Zhang Q Y,Cen M Y,Zhou G Q,et al.Extracting trees from LiDAR data in urban region[J].Acta Geodaetica et Cartographica Sinica,2009,38(4):330-335. [3] 许晓东,张小红,程世来.航空LiDAR的多次回波探测方法及其在滤波中的应用[J].武汉大学学报:信息科学版,2007,32(9):778-781. Xu X D,Zhang X H,Cheng S L.Detection of multiple echoes and its application in filtering of airborne LiDAR[J].Geomatics and Information Science of Wuhan University,2007,32(9):778-781. [4] 张小红.利用机载LiDAR双次回波高程之差分类激光脚点[J].测绘科学,2006,31(4):48-50. Zhang X H.Airborne LiDAR points cloud classification based on difference of twice return pulse heights[J].Science of Surveying and Mapping,2006,31(4):48-50. [5] 马东洋,尚大帅,保永强.一种基于高程差粗糙度的建筑物激光脚点提取方法[J].测绘科学技术学报,2013,30(2):158-161. Ma D Y,Shang D S,Bao Y Q.A building extraction method based on roughness of height difference for airborne LiDAR point cloud data[J].Journal of Geomatics Science and Technology,2013,30(2):158-161. [6] Zhang Z X,Zhang Y J,Zhang J G,et al.Photogrammetric modeling of linear features with generalized point photogrammetry[J].Photogrammetric Engineering and Remote Sensing,2008,74(9):1119-1127. [7] Yang Y,Lin Y.Object-based level set model for building detection in urban area[C]//2009 Urban Remote Sensing Joint Event.Shanghai,China:IEEE,2009. [8] 徐宏根,王建超,郑雄伟,等.面向对象的植被与建筑物重叠区域的点云分类方法[J].国土资源遥感,2012,24(2):23-27.doi:10.6046/gtzyyg.2012.02.05. Xu H G,Wang J C,Zheng X W,et al.Object-based point clouds classification of the vegetation and building overlapped area[J].Remote Sensing for Land and Resources,2012,24(2):23-27.doi:10.6046/gtzyyg.2012.02.05. [9] 徐文学,杨必胜,魏征,等.多标记点过程的LiDAR点云数据建筑物和树冠提取[J].测绘学报,2013,42(1):51-58. Xu W X,Yang B S,Wei Z,et al.Building and tree crown extraction from LiDAR point cloud data based on multi-marked point process[J].Acta Geodaetica et Cartographica Sinica,2013,42(1):51-58. [10]李峰,崔希民,袁德宝,等.利用机载LiDAR点云提取复杂城市建筑物面域[J].国土资源遥感,2013,25(3):85-89.doi:10.6046/gtzyyg.2013.03.15. Li F,Cui X M,Yuan D B,et al.Extraction of the building region from airborne LiDAR point clouds under complex urban conditions[J].Remote Sensing for Land and Resources,2013,25(3):85-89.doi:10.6046/gtzyyg.2013.03.15. [11]任自珍,岑敏仪,张同刚,等.基于等高线的表面估计滤波方法[J].遥感学报,2009,13(1):91-96. Ren Z Z,Cen M Y,Zhang T G,et al.Filtering method of LiDAR data based on contours[J].Journal of Remote Sensing,2009,13(1):91-96. [12]余烨,刘晓平,Buckles B P.基于数据融合的居民区建筑物重建方法研究[J].电子学报,2014,42(2):250-256. Yu Y,Liu X P,Buckles B P.Residential building reconstruction based on data fusion[J].Acta Electronica Sinica,2014,42(2):250-256. [13]谢瑞,程效军,管海燕.机载激光扫描与航空影像的融合分类与精度分析[J].同济大学学报:自然科学版,2013,41(4):607-613. Xie R,Cheng X J,Guan H Y.Classification and accuracy analysis of LiDAR and aerial images[J].Journal of Tongji University:Natural Science,2013,41(4):607-613. [14]李云帆,龚威平,林俞先,等.LiDAR点云与影像相结合的建筑物轮廓信息提取[J].国土资源遥感,2014,26(2):54-59.doi:10.6046/gtzyyg.2014.02.10. Li Y F,Gong W P,Lin Y X,et al.The extraction of building boundaries based on LiDAR point cloud data and imageries[J].Remote Sensing for Land and Resources,2014,26(2):54-59.doi:10.6046/gtzyyg.2014.02.10. [15]Zhang K Q,Chen S C,Whitman D,et al.A progressive morphological filter for removing nonground measurements from airborne LiDAR data[J].IEEE Transactions on Geoscience and Remote Sensing,2003,41(4):872-882. [16]李勇,吴华意.基于形态学梯度的机载激光扫描数据滤波方法[J].遥感学报,2008,12(4):633-639. Li Y,Wu H Y.Filtering airborne LiDAR data based on morphological gradient[J].Journal of Remote Sensing,2008,12(4):633-639. [17]Pfeifer N,Stadler P,Briese C.Derivation of digital terrain models in the SCOP++environment[C]//OEEPE Workshop on Airborne Laserscanning and Interferometric SAR for Detailed Digital Terrain Models.Stockholm,2001. [18]Axelsson P.Processing of laser scanner data algorithms and applications[J].ISPRS Journal of Photogrammetry and Remote Sensing,1999,54(2/3):138-147. [19]Shao Y C,Chen L C.Automated searching of ground points from airborne LiDAR data using a climbing and sliding method[J].Photogrammetric Engineering and Remote Sensing,2008,74(5):625-635. [20]Chehata N,David N,Bretar F.LiDAR data classification using hierarchical K-Means clustering[J].The International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2008,37(Part B3b):325-330. [21]Zhang J,Li L L,Lu Q P,et al.Contour clustering analysis for building reconstruction from LiDAR data[J].The International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2008,37(Part B3b):355-360. [22]Li L L,Zhang J,Jiang W S.Automatic complex building reconstruction from LiDAR based on hierarchical structure analysis[C]//MIPPR 2009:Pattern Recognition and Computer Vision,74961J.Yichang,China:SPIE,2009. (责任编辑:邢宇) Classification of LiDAR point clouds in urban areas based on the analysis of regional multi-return density LI Lelin1,JIANG Wanshou2,GUO Chengfang3 (1.National-LocalJointEngineeringLaboratoryofGeo-SpatialInformationTechnology,HunanUniversityofScienceandTechnology,Xiangtan411201,China; 2.StateKeyLaboratoryofInformationEngineeringinSurveying,MappingandRemoteSensing,WuhanUniversity,Wuhan430079,China; 3.ArchitecturalInstituteofTechnology,LiuzhouRailwayVocationalTechnicalCollege,Liuzhou545007,China) A new strategy for the classification of raw LiDAR points in urban areas,which is based on the comprehensive utilization of echo features of different object types and terrain information,is proposed in this paper according to a regional multi-return density analysis. The main procedure of the classification of the off-terrain points begins with the construction of Triangulated Irregular Network (TIN),and then the region of each object is captured by the contours clustering based on the topological relations of various contours traced from the TIN. Finally,the type of the object is recognized by the statistical analysis of the regional multi-return density through the significant difference between the building region and the vegetation region. This method not only makes good use of the difference in echo features between different objects such as buildings and trees but also confirms the existence of the multi-returns on the edges of the building. At the same time,the adaptive region determination of the objects is accomplished following the contours clustering. So the proposed method can dramatically increase the classification accuracy and overcome the weakness of the traditional methods,thus being more useful to the study and application of such aspects as building reconstruction and parameters estimation of the trees. Experiments prove that the new algorithm can get an effective classification. LiDAR; mathematical morphology; point clouds classification;contour clusters;regional multi-return points density 2013-12-25; 2014-06-23 湖南省教育厅项目“复杂环境下基于机载LiDAR点云的建筑物检测方法研究”(编号:13C325)和国家自然科学青年基金项目“山地城市环境下等高线辅助的机载LiDAR点云复杂建筑物三维模型重建方法研究”(编号:41401497)共同资助。 10.6046/gtzyyg.2015.02.05 李乐林,江万寿,郭程方.基于区域多次回波点密度分析的城区LiDAR建筑物提取[J].国土资源遥感,2015,27(2):29-35.(Li L L,Jiang W S,Guo C F.Classification of LiDAR point clouds in urban areas based on the analysis of regional multi-return density[J].Remote Sensing for Land and Resources,2015,27(2):29-35.) TP 181; TP 79 A 1001-070X(2015)02-0029-07 李乐林(1981-),男,博士,讲师,主要从事机载LiDAR数据处理及高分辨率遥感影像处理方面的研究。Email: lilelindr@126.com。2 实验分析

3 结论
猜你喜欢
科学技术创新(2022年30期)2022-10-21
河北地质(2022年2期)2022-08-22
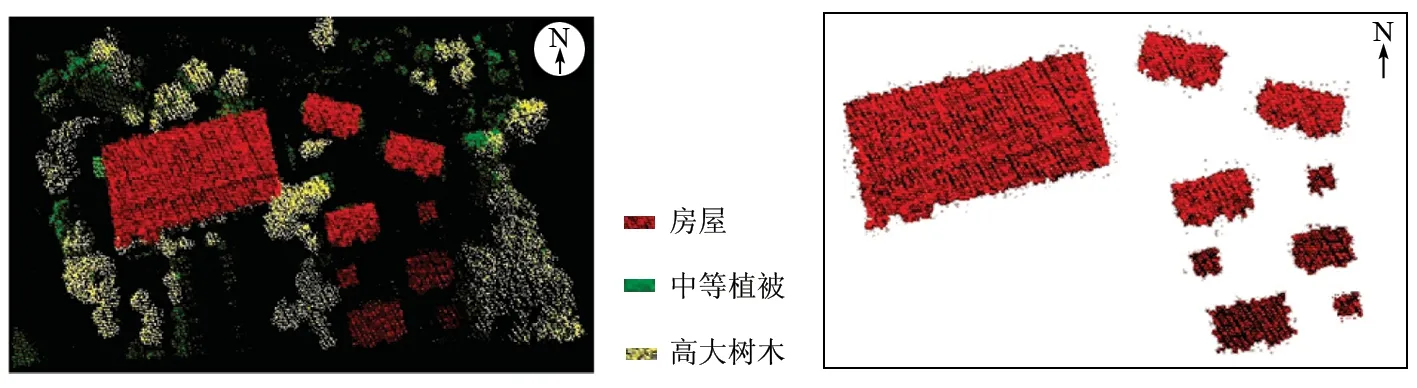
科学大众(2020年17期)2020-10-27
西部论丛(2020年1期)2020-10-13
广东教学报·教育综合(2019年87期)2019-09-10
测绘通报(2019年1期)2019-02-15
电子制作(2018年16期)2018-09-26
中国公路(2017年11期)2017-07-31
地理教育(2016年10期)2016-11-09
火控雷达技术(2016年3期)2016-02-06
