自动化远程智能监控在矿山溜破系统的应用
2015-03-08 08:54丁孟军
现代矿业 2015年4期
丁孟军
(中钢集团山东矿业有限公司)
自动化远程智能监控在矿山溜破系统的应用
丁孟军
(中钢集团山东矿业有限公司)
矿山井下溜破系统粉尘多、噪音大、湿度高,对现场设备设施及操作人员造成不利的影响;同时,原有的继电控制系统故障率高,故障查找与处理效率低,升级改造困难。为了改变现状和提升设备运转率,采用可编程控制器、检测仪器仪表、网络交换机、远程控制计算机、WINCC软件等对溜破系统进行了优化改造,完善了系统的安全保护,提高了设备的生产效率,实现了矿山井下溜破系统设备的远程自动化智能监控,达到了预期的目的。
溜破系统 可编程控制器 自动化远程控制 冗余环网
在科技日益发展的今天,不断提升设备的自动化水平,改善操作人员的工作环境,提升设备的运转效率,提升设备本质化安全的水平是大势所趋,也是科技发展的必然结果。目前矿山井下大部分设备自动化水平低,很多设备仍是继电控制,对设备的高效运行及安全生产造成不利影响。因此,许多矿山设备急需改造升级。矿山井下溜破系统设备包括重型板式给料机、鄂式破碎机、除尘系统等,设备安装在井下几百米,现场存在大量的粉尘、潮气等,环境比较恶劣,传统的继电控制难以保证设备的高效、可靠运转,对于设备故障很难做到快速判断和及时处理。通过对电控系统自动化远程智能监控改造,提升设备的技术含量,对故障可以进行远程诊断和处理,极大地提升设备的运转效率,降低操作人员的工作强度,改善操作人员的工作环境。
1 系统硬件配置
为保证电控系统改造后的可靠性和稳定性,采用工业级计算机、以太网交换机以及相关的检测仪器仪表实现对远程设备数据的采集及智能监控。
PLC柜内配置隔离变压器、西门子模块、中间继电器等。可编程控制器选用西门子S7-300系列,可编程控制器对环境要求低,可在粉尘、湿度较为恶劣的环境中工作,而且可编程控制器对电源电压的要求低,抗干扰能力强,具有较强的抗震性能,同时可编程控制器较易实现电控系统的优化升级,通过通讯模块可实现远程设备联网通讯及远程诊断监控,连接其他设备方便。PLC配置有CPU模块,数字量输入模块、输出模块,模拟量输入模块,以太网通讯模块,电源模块[1]。CPU模块选用CPU315-2DP,用于进行逻辑运算及数学运算,并协调整个系统的工作。数字量输入模块用于连接外部的机械触点和电子式传感器,例如位移传感器、控制按钮、接触器的辅助触点等。数字量输出模块用于驱动接触器、中间继电器、指示灯等负载。模拟量输入模块采集现场设备电流、电压、温度、料位等模拟量数据。CP343-1模块将S7-300连接到公司级千兆网,实现上位机和其他PLC的连接。
以太网交换机选用MOXA EDS-510A系列,EDS-510A千兆网管型以太网交换机配有3个端口,2个用于构建支持Turbo Ring和Turbo Chain(自愈时间小于20 ms),RSTP/STP和MSTP网络冗余协议,增加骨干网络的可靠性和可用性。EDS-510A系列保证了本系统的通信安全。
检测仪表主要有超声波料位计、温度传感器、位移传感器、电流变送器等。超声波料位计、温度传感器及电流变送器将探测到的料位、温度、电流转换成4~20 mA电流,输入到模拟量输入模块。位移传感器将位移信号输入到数字量模块,实现位移信号的采集。
2 整体系统设计
对配置的PLC模块进行硬件组态,在配置机架(HW Config)窗口中对机架、模块、分布式I/O(DP)机架以及接口子模块等进行排列。按照控制系统性质使用硬件及网络配置,然后在组态中定义每个模块的参数,使软件和硬件能够一一对应[1],见图1。本地控制操作台ET200利用Profibus DP总线与PLC通信,代替了大量的分散独立的连接电缆,节约了安装调试时间及改造升级成本。
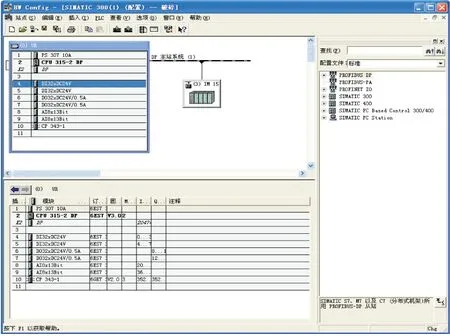
图1 可编程控制器硬件配置
以太网网络拓扑有总线型、星型、冗余型环网3种,冗余环网是使用一个连续的环将每台设备连接在一起,能够保证千兆级环形工业以太网的可靠性,具有传输速度块,通讯可靠,具备单点断路自动愈合的功能[2]。采用工业级千兆冗余环网,本系统将交换机串入公司级光纤冗余环网,实现远程通信。现场PLC与公司级环网连接见图2。
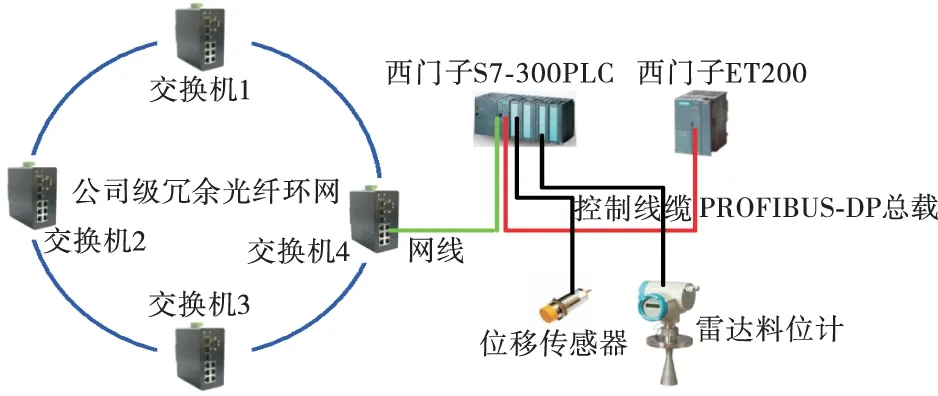
图2 公司环网与PLC的通讯连接
对CP343-1模块进行通信设置,通过修改模块的IP地址和子网掩码,在不安装SIEMEN-NET软件的前提下实现网络通讯连接。TCP/IP协议支持大数据量的传输,数据可以通过工业以太网TCP/IP网络传输。SIMATIC S7可以通过建立TCP连接来发送和接收数据[2],见图3。
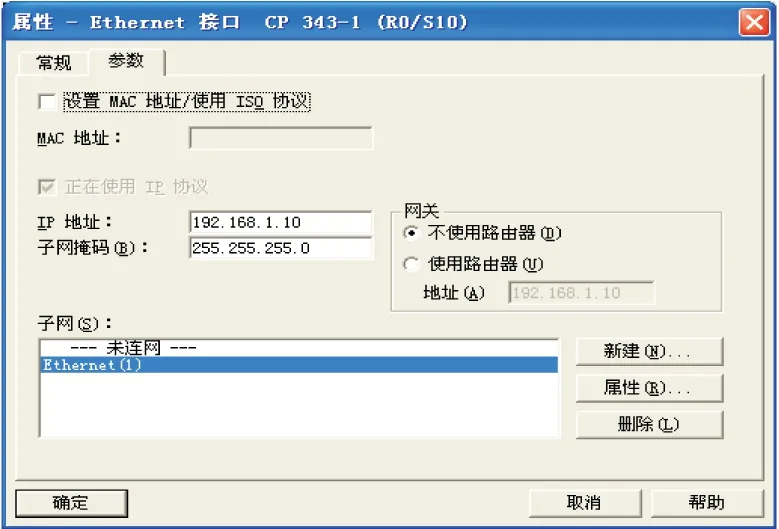
图3 CP343-1通信设置
远程自动化监控平台采用WINCC监控软件。SIMATIC Wincc性能全面、技术先进、系统开放,通过OPC方式实现与远程PLC连接。WINCC能够提供生成复杂可视化任务的组件和函数,并且生成画面、脚本、报警、趋势和报表的编辑器,使用Microsoft SQL Server 2000作为其组态数据和归档数据的存储数据库[3]。
此系统包括2种控制方式,一种为本地控制,一种为远程控制,以本地控制为优先级。本地控制和远程控制又分为手动、自动和检修3种控制方式。系统状态画面显示现场温度、料位、电流、故障、设备运行状态等。WINCC远程监控画面可以实现远程、本地以及自动、手动、检修方式的切换,同时可以通过手动实现远程设备的启动和停止的操作。故障画面主要显示破碎堵塞故障、变频器故障、重板电流高故障、信号急停故障等,见图4。

图4 溜破系统WINCC监控画面
自动化远程智能控制考虑的首要问题是设备的安全运转。为了保证设备的监控及操作安全,在设备的各个关键部位安装检测仪器仪表[4],将检测到的现场信号输入到PLC模块,经过CPU的运算控制,实现安全控制连锁功能。
井下上部溜井深度为190 m,溜井的下部是重型板式给料机,当运输机车卸料时料石的冲击力较大,如果不能保证溜井内有相当深度的料石作为缓冲,将对重型板式给料机产生破坏性冲击。为了不放空溜井,在溜井的上部安装一套料位传感器,通过信号传输到S7-300 PLC运算处理,处理结果参与联锁控制,程序见图5。当料位下降到一定深度后,重型板式给料机停止运行,避免了料石冲击。
为了防止大块堵塞破碎机进料口,造成设备损坏,在破碎机内部安装一套机械限位开关,见图6。当内部料位堵塞上升到一定高度后,料石挤压机械限位开关,开关信号(转换成信号M37.3)送入到PLC与重型板式给料机,进行联锁,具体程序见图7。
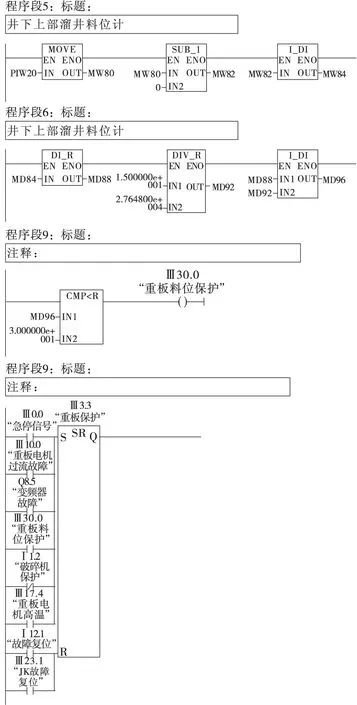
图5 料位传感器数据处理程序
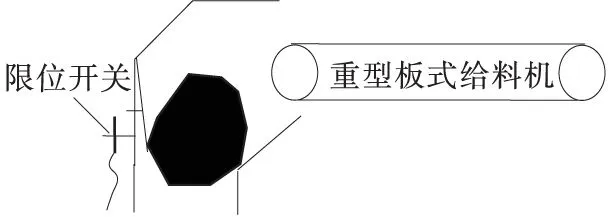
图6 破碎机防堵塞开关示意
为了控制下部小溜井料位,防止溜井满仓造成破碎机闷机事故,在料仓的顶部安装料位传感器和机械料位计各一套。当料位到达一定高度后,料石冲击机械限位开关,开关信号(I8.0)送入到PLC,进行联锁,程序见图8。同时料位传感器模拟量信号也送入到PLC,经过运算后进行联锁控制。当料位高时,控制重型板式给料机及破碎机停车。
在设备无人值守自动运转的情况下,对设备的运行状态进行远程实时监控和安全闭锁非常重要。尤其在设备的关键运转部位安装各种传感器,对现场信号进行采集运算,实时监控是非常必要的。当设备出现异常情况时,如电流升高、重板跑偏、设备震动、温度升高、料石堵塞等,WINCC将发出报警信号,同时在软件的内部进行保护闭锁,防止设备故障进一步恶化。通过SIMATIC Manager软件对程序进行监控与维护,及时了解现场设备所有部位运转的状态及故障,为快速处理设备故障提供了可靠的参考依据。
3 结 语
通过对井下溜破系统设备远程智能自动化控制的优化,有效地降低了设备的故障率,实现了可视化监控,可以快速判断和处理故障,实时掌握设备的运

图7 破碎机防堵塞保护程序

图8 防满仓机械料位保护程序
行状态,极大地提升了设备的运转效率,提高了设备运行的安全性、稳定性、可靠性,改善了操作人员的工作环境,降低了成本。优化后的系统利于今后的升级改造,也可较容易地融入到公司级数字化控制系统,为实现公司级设备集中控制管理打下了坚实的基础。
[1] 张运刚,宋小春,郭武强.从入门到精通——西门子S7-300/400 PLC技术与应用[M].北京:人民邮电出版社,2007.
[2] 崔 坚.西门子工业网络通信指南[M].北京:机械工业出版社,2009.
[3] 向晓汉.西门子WINCC V7从入门到提高[M].北京:机械工业出版社,2012.
[4] 曾周末.仪器仪表系统设计与应用[M].北京:机械工业出版社,2012.
2014-10-27)
丁孟军( 1971—),男,副总经理,工程师,277713 山东省临沂市苍山县鲁城乡。
猜你喜欢
军事文摘(2022年20期)2023-01-10
英语文摘(2021年11期)2021-12-31
哈尔滨铁道科技(2020年3期)2021-01-18
矿山机械(2020年2期)2020-03-24
学生天地(2018年19期)2018-09-07
科技风(2018年15期)2018-05-14
中国交通信息化(2017年11期)2017-06-06
科学中国人(2016年24期)2016-09-21
智能建筑电气技术(2015年5期)2015-12-10
中国交通信息化(2014年12期)2014-06-05