
三态空间电压矢量分布三桥臂开关功放的控制
2015-03-07 02:14李睿孙岩桦邱洪段瑞瑞
西安交通大学学报 2015年12期
李睿,孙岩桦,邱洪,段瑞瑞
(1.西安交通大学机械电子与信息系统研究所, 710049, 西安;2.深圳大学深圳电磁控制重点实验室, 518060, 广东深圳)
三态空间电压矢量分布三桥臂开关功放的控制
李睿1,孙岩桦1,邱洪2,段瑞瑞1
(1.西安交通大学机械电子与信息系统研究所, 710049, 西安;2.深圳大学深圳电磁控制重点实验室, 518060, 广东深圳)
针对传统电磁轴承开关功放采用两路独立的H桥控制结构存在的体积庞大、功率损耗高等缺点,以空间电压矢量分布(space voltage pulse-width modulation,SVPWM)控制理论为基础,结合H桥三电平控制的优点,提出一种三电平三桥臂功率放大器的实现方法。该方法通过对不同结构载波的选择分别设计了基于对称结构、非对称结构下SVPWM主动电磁轴承开关功放的控制算法,对比分析了在不同载波结构下纹波电流的特性,并在Matlab/Simulink环境下构建出两种原理性仿真模型。在dSPACE实时仿真系统下搭建出一个三桥臂功放电路控制平台,并对两种不同结构下功率系统的频率特性进行了测试。理论与实验结果表明,基于对称结构的三态SVPWM控制算法,不仅可有效地提高电流响应速度,而且还能够使纹波电流频率加倍、纹波幅值显著减小,当频率为1 750 rad/s时,其系统增益仅为-3 dB。因此,该方法在满足电磁轴承系统低纹波电流和良好动态特性要求的同时也提高了主动电磁轴承系统的可靠性性能。
三态空间电压矢量分布;开关功放;电流纹波
主动电磁轴承是利用定子和转子间的可控电磁力来实现转子无接触支承的一类轴承,该轴承不仅消除了摩擦和磨损,而且在确保承载力的基础上,系统的阻尼与刚度可调[1]。主动电磁轴承系统是开环不稳定的,必须通过闭环反馈才能使系统稳定。在磁悬浮系统中,输出的控制信号必须进行放大才能驱动线圈工作,因此功率放大器是系统中非常重要的一个部件,它对主动磁悬浮系统的性能影响很大。在对体积和功耗要求非常高的应用中,例如空间飞行器等,如果能有效降低功率放大器的体积和损耗,则能大大提高磁悬浮系统的性能[2]。
传统的电磁轴承开关功放,每个线圈都选用独立H桥结构。该结构下的开关功放虽然控制简单,但功率管数量较多,成本、体积和功率损耗较大[3]。为改进该缺点,人们将在变频调速系统中已经广泛使用的逆变器三桥臂功率输出级结构和空间电压矢量分布(SVPWM)控制方式引入磁悬浮系统的功率放大器中[4-5]。利用一个三桥臂功率放大器可以同时驱动电磁轴承的两个独立线圈,从而减少了功率放大器数量,可以大大减小系统的体积和功耗。文献[6]首先将SVPWM技术引入到电磁轴承的开关功率放大器中,并实现了单自由度电磁轴承的稳定悬浮。文献[7]详细分析了可用于电磁轴承的三桥臂和四桥臂开关功放的SVPWM生成方式,并提出了一种基于节点电位的控制方法。文献[8]给出了一种基于FPGA和DSP的三桥臂功率放大器实现方法。文献[9]将其成功应用到电磁轴承支承的转子系统上,实现了系统的可靠运行。文献[10-11]进一步研究了可用于磁悬浮轴承的四桥臂和五桥臂开关功率放大器。
H桥功率放大器的实现形式有多种,最常用的是两电平和三电平PWM控制方式[12]。相对于两电平控制方式,由于三电平控制能大大减小电流纹波,从而有效降低轴承的涡流损耗,提高磁悬浮系统的效率,因此被普遍采用[13]。
本文将以SVPWM控制理论为基础,结合H桥三电平控制的优点,给出一种三电平三桥臂功率放大器的实现方法,并通过仿真和实验,研究其在不同载波下纹波电流的特性。SVPWM三桥臂开关功放的应用可有效降低功率放大器的体积、成本和功耗,提高主动电磁轴承系统的综合性能。
1 SVPWM三桥臂开关功放
1.1 三态功放的结构特性分析
数字型三桥臂开关功放采用全桥结构H级联电路,以绕组线圈电流作为受控对象,其基本结构如图1所示。它的特点是通过三路桥臂同时控制两个独立的轴承线圈电流,通过共用一路桥臂达到减小功率管的数目,从而有效降低了功率损耗,也提高了系统的可靠性。
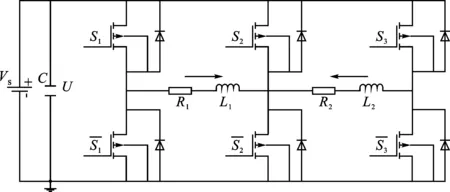
图1 三态SVPWM三桥臂功率放大器电路结构图
传统的两态开关功放只能为负载提供正向导通“+U”和反向导通“-U”两种状态。三态开关功放是在两态工作的基础上引入了续流状态,使负载电压可在“+U”、“0”、“-U”3种状态下进行相互转换。其中,通过引入的“0”状态作用,减少了负载电压的突变程度,有效减少了纹波电流。
针对图1的三态SVPWM功放结构,对于其中的任一桥臂,由于只能有一个开关管导通,故定义上桥臂导通、下桥臂关断为状态“1”,上桥臂关断、下桥臂导通为状态“0”,则三只桥臂共有[S1,S2,S3]组成的8种不同状态,分别定义为(0,0,0)~(1,1,1)。图2是SVPWM三桥臂功率放大器的基本电压矢量分布图。其中,(0,0,0)和(1,1,1)均为零矢量状态,当相邻两个电压矢量切换时,只有一个桥臂开关动作。以R1L1绕组线圈上的电压作为xoy电压矢量平面的x轴,R2L2绕组线圈上的电压为y轴,且规定绕组线圈电压的正向如图1中的箭头方向。U1、U3、U4和U6分别在x、y轴上,而U2和U5则在π/4和5π/4角度方向上。上述6个矢量将y平面分成6个扇区。
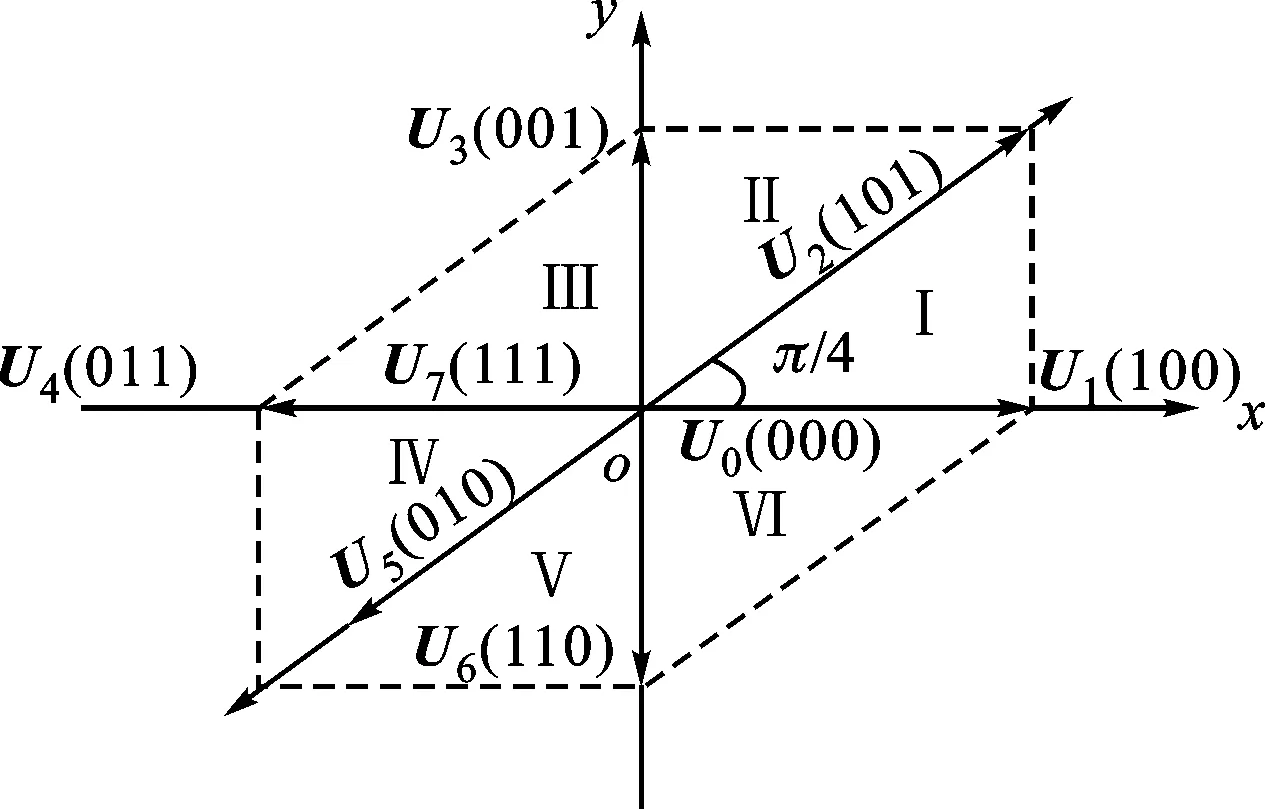
图2 SVPWM三桥臂开关功放基本电压矢量分布图
1.2 三态SVPWM的控制方法设计
对于期望的位移,两个线圈电流i1和i2可以通过按一定的时序控制三只桥臂的导通来实现。在每个PWM周期内,首先判断两个独立的绕组线圈电压矢量扇区分布,计算出基本电压矢量的工作时间,从而得到三桥臂不同功率管的导通时间,实现8个矢量间的优化切换,从而达到间接控制功放的输出电流强度,最终实现主动调节磁悬浮系统所需电磁力的目的。
1.2.1 扇区的判断 由于任意一个控制周期内的参考电压矢量Udc可以表示为
(1)
因此,可通过Ux、Uy的大小关系,判断出Udc所在的扇区,具体规则见表1。
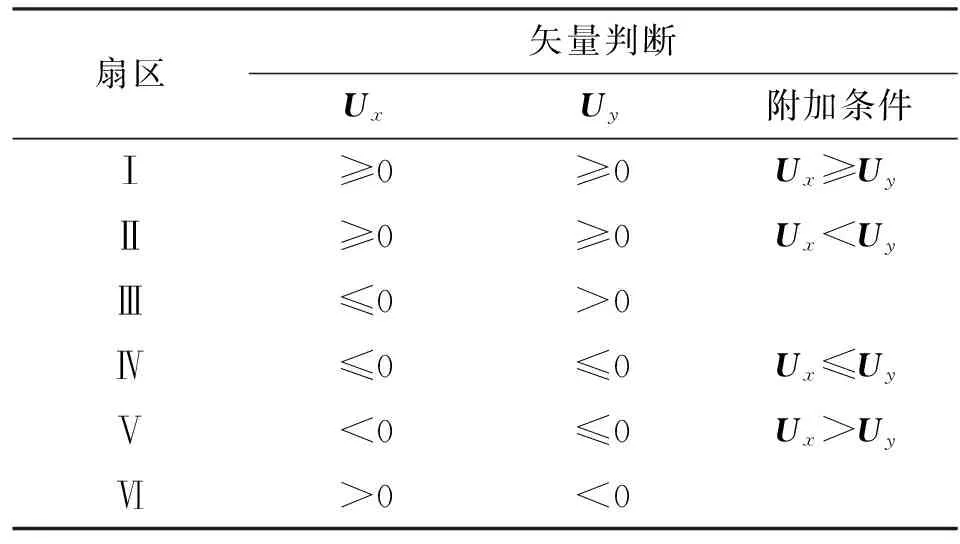
表1 参考电压矢量Udc的扇区判断规则
1.2.2 基本电压矢量工作时间计算 根据伏秒积相等原则,任一控制周期内的参考电压矢量Udc的作用效果,可等效为相邻两个基本电压矢量的作用效果
(2)
式中:T1、T2为一个周期内基本电压矢量的工作时间;Ts为PWM的开关周期。由于系统工作在三状态模式,每个控制周期内还需要有零状态,因此
(3)
为保证三路桥臂开关时间与开关顺序的对称性,剩余时间T0平均分配给两个零电压矢量U0、U7。由式(2)和式(3)可解得3个工作时间T1、T2、T0,当Udc分别在6个不同扇区时,具体的计算公式见表2。
1.2.3 各桥路状态切换时间计算 SVPWM算法得到三路相关联的PWM信号,根据Udc所处扇区以及矢量大小的不同,在一个PWM控制周期内,按照所要求的工作时间完成各开关状态的切换。1.2.2节给出了Udc处在不同扇区情况下,各基本电压矢量的工作时间,但是并没有给出各矢量的作用顺序。根据各工作电压矢量在一个PWM周期内切换状态的不同,SVPWM的调制方式可分为对称结构与非对称结构两种,它们的基本原理如图3所示。由图可见,对称结构下,每次电压矢量的转换过程只改变一路桥臂的开关状态,而在非对称结构下,则会存在同时改变三路桥臂开关状态的情况。
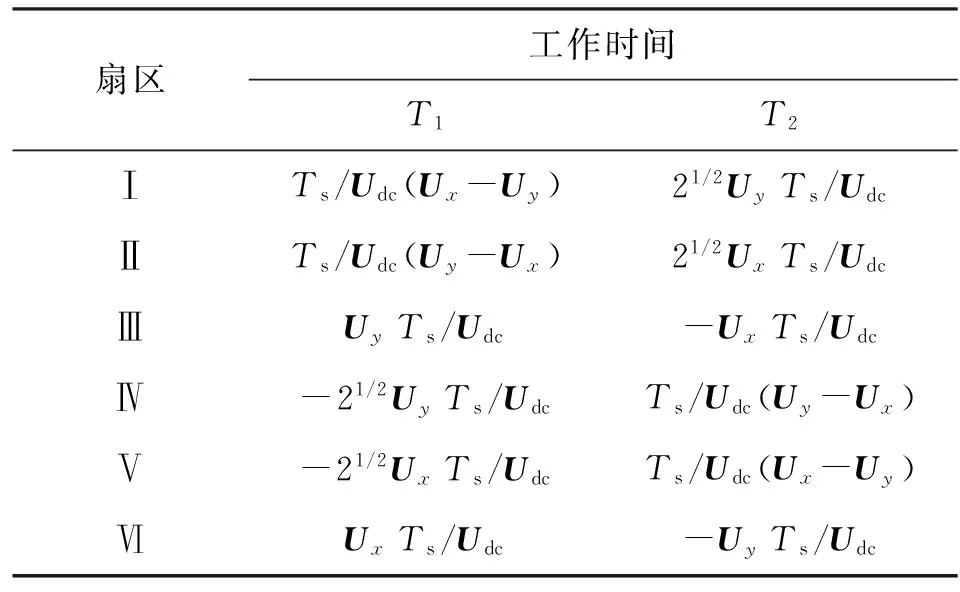
表2 基本电压矢量工作时间
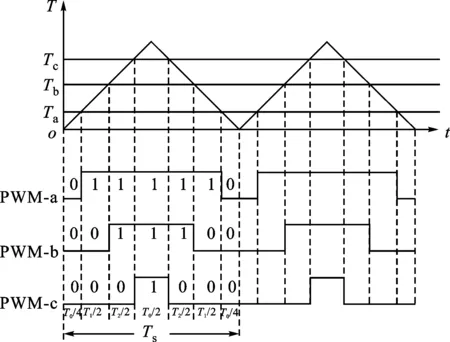
(a)对称结构下SVPWM工作原理
(b)非对称结构下SVPWM工作原理图3 两种典型结构的SVPWM工作原理图
图3a是以对称三角波为载波的对称式SVPWM调制式,它的三桥臂a、b、c的基本开关状态点的转换时间如式(4)所示,这相当于用对称三角波为载波进行SVPWM调制的方式。
Ta=T0/4
Tb=Ta+T1/2
(4)
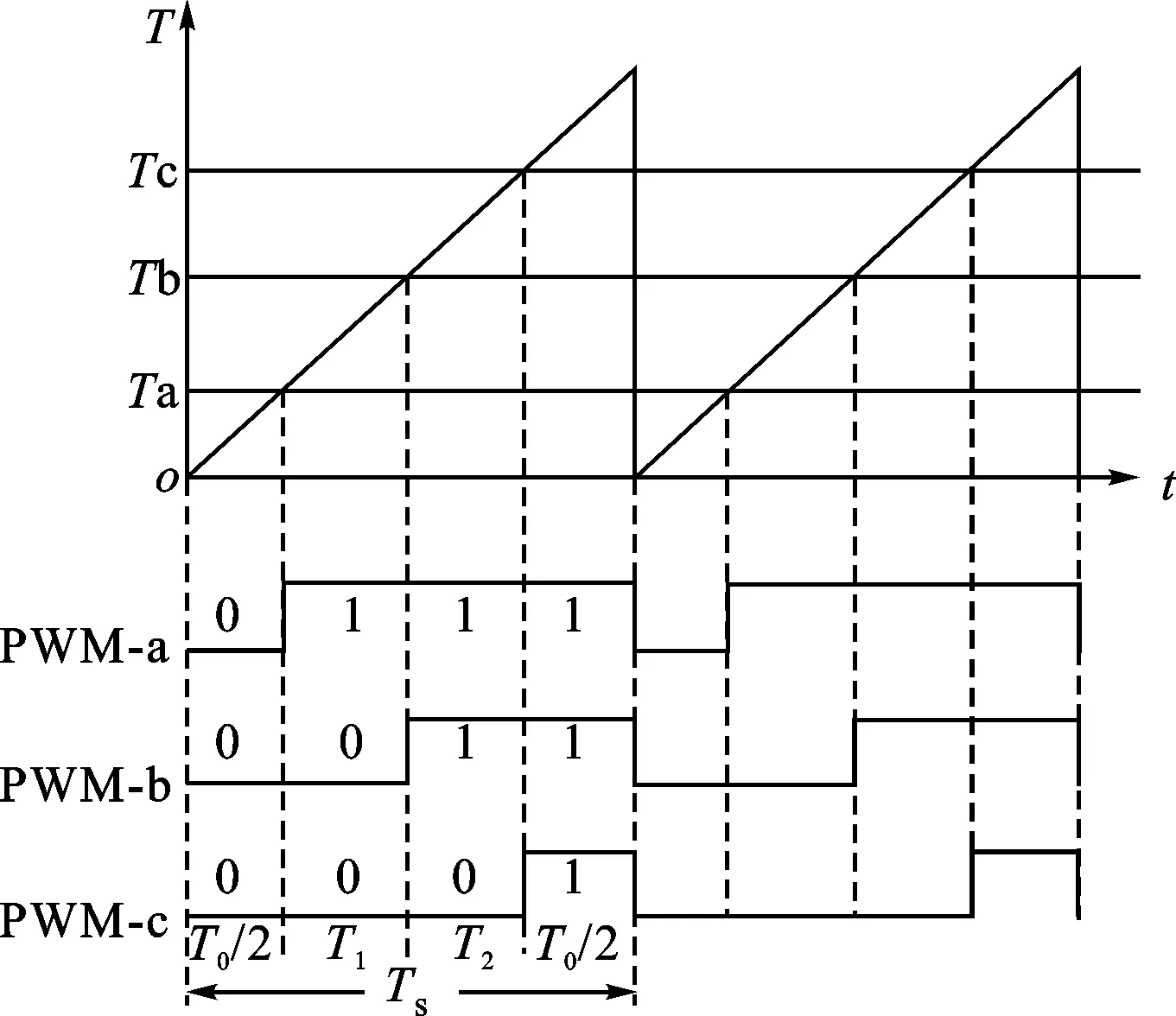
式中:Ta、Tb、Tc分别为引入的3个时间变量。图3b是非对称式PWM产生方式,其三桥臂a、b、c的基本开关状态点转换时间如式(5)所示,这相当于用单增锯齿波为载波进行SVPWM调制的方式。
Ta=T0/2
Tb=Ta+T1
(5)
在图3所示的不同扇区情况下,三桥臂开关状态的切换时间见表3。

表3 三桥路开关点转换时间表
1.3 两种结构下的纹波电流分析
非对称型载波选择单增锯齿波结构,其相应的线圈纹波如图4a所示。由图可见,线圈电流以Ts的时间间隔交替变化。
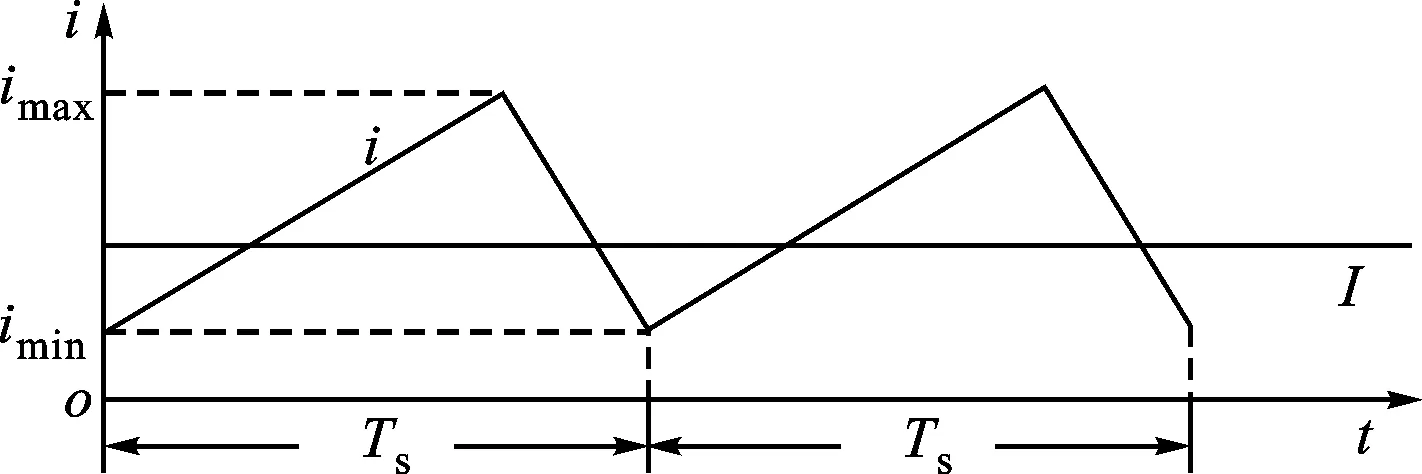
(a)非对称型SVPWM电流纹波示意图

(b)对称型SVPWM电流纹波示意图图4 SVPWM输出电流纹波示意图
对于对称型的三态SVPWM开关功放,载波选用对称三角波,在一个控制周期内,各基本电压矢量的作用时间与顺序对称分布,产生6路相关联的中心对称高频PWM开关驱动信号加载在三路桥臂上,使得每半个开关周期内,流经负载线圈的电流迅速从imin增大到imax,继而进入续流状态。线圈电流以Ts/2为周期变化,纹波电流频率加倍,由于纹波电流的幅值随频率的增大而减小,对称型SVPWM控制算法保证了输出的纹波电流在一个很小的范围内波动,从根本上改善了输出电流的质量。
2 模型仿真
在Matlab/Simulink环境下,分别建立了对称和非对称型三桥臂SVPWM开关功放的仿真模型。针对所设计的三桥臂开关功放系统的实时性能以及在高频控制周期下的纹波抖动问题,本文采用了带前馈补偿的PID控制器结构,设计出的控制系统结构如图5所示。
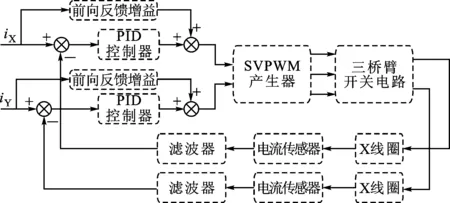
图5 控制系统结构框图
仿真参数的设置情况如下:对称与非对称SVPWM模型下母线电压Ud=36V,开关频率f=20kHz,线圈绕组电阻R=0.99Ω,电感L=2mH,前馈比例控制器系数Kf=0.4,PID控制器参数分别为Kp=3、Ki=0.1、Kd=0。
分别选用频率为20kHz的三角波和单增锯齿波作为载波,选用幅值为1A、相位为200rad/s的正弦信号作为参考信号时,得到的追踪信号与纹波电流如图6所示。
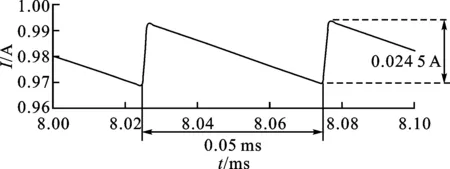
(b)非对称SVPWM正弦信号纹波电流
(c)对称SVPWM正弦信号追踪效果
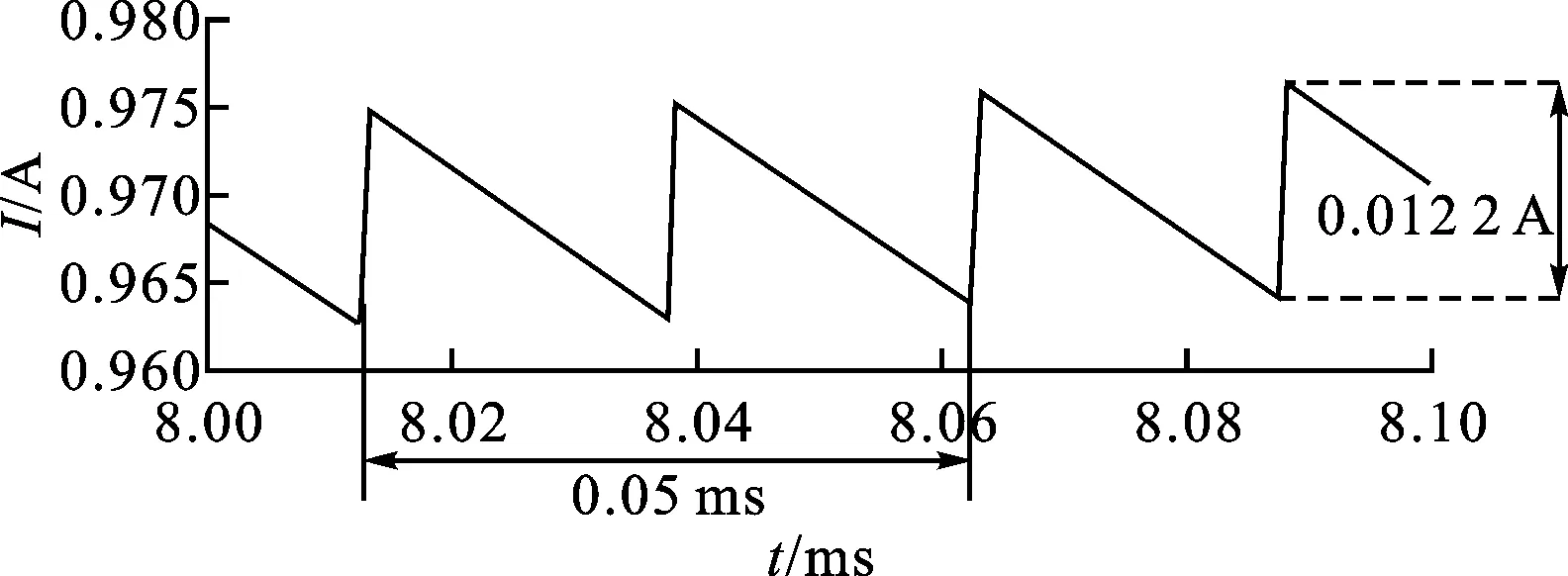
(d)对称SVPWM正弦信号纹波电流图6 SVPWM正弦信号追踪效果与纹波电流
图6的仿真结果表明,在相同工况条件下,采用非对称结构下的SVPWM功放模型得到正弦响应纹波电流为0.024 5 A,频率为20 kHz,而采用对称结构下的SVPWM功放模型得到正弦响应的纹波电流仅为0.012 2 A,频率为40 kHz,纹波频率加倍,此结果与理论推导计算结果吻合。
3 实验与结果分析
在仿真分析设计的基础上,本文设计开发了三桥臂功放电路,并在dSPACE控制器上分别实现了对称与非对称结构下的三态SVPWM控制算法。具体的系统结构框图如图7所示。

图7 系统结构框图
图7中母线电压为36 V,被控对象为两路独立的轴承线圈,其参数见表4。
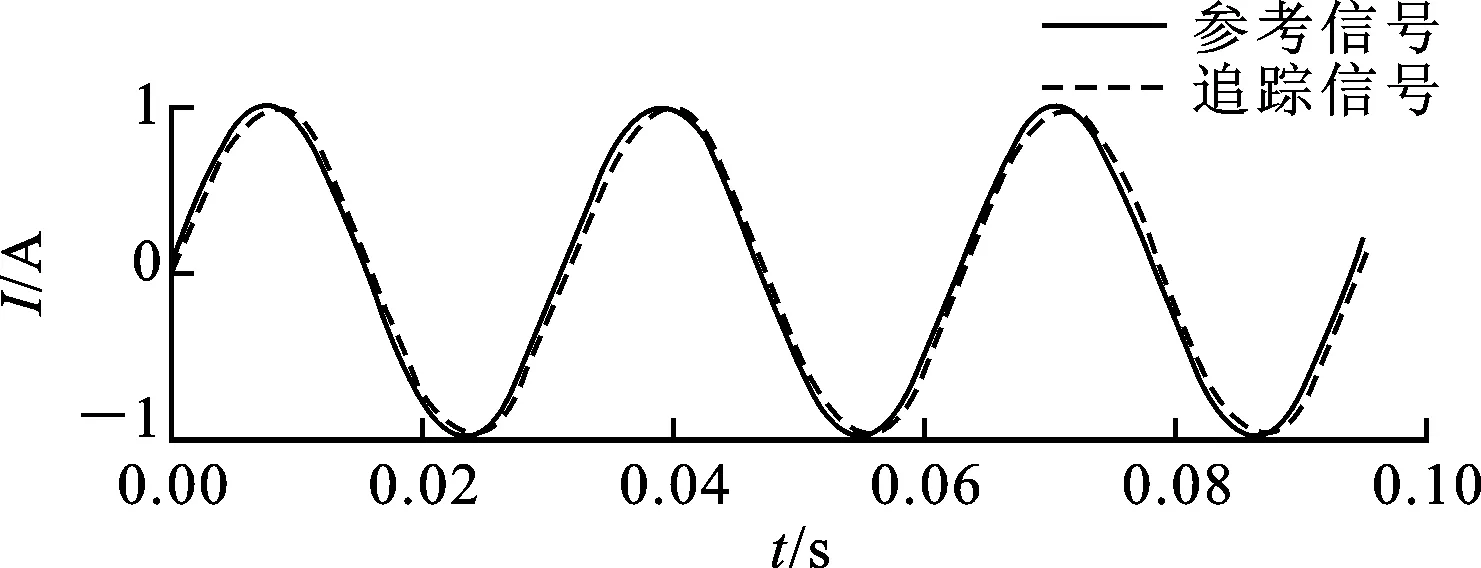
在闭环控制情况下,给定相位为200 rad/s、幅值为1 A的正弦信号,两路信号的相位差为π/4。PWM频率均设置为20 kHz。两路给定参考之间功放输出电流与给定参考间的跟踪效果如图8所示,其中,实线为给定参考输入信号,
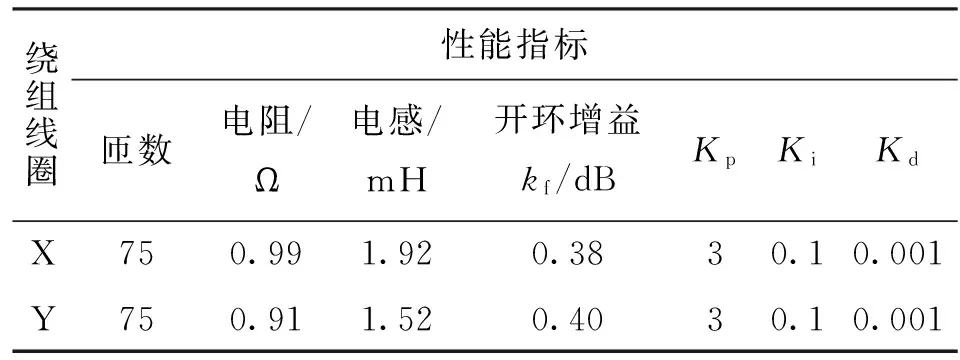
虚线为功放输 表4 绕组线圈参数
出实际电流信号。由图可见,所设计的三桥臂功放电路在所设计控制算法的控制下,可以很好地追踪给定参考信号。

(a)X绕组线圈电流跟踪
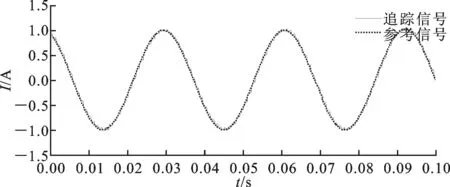
(b)Y绕组线圈电流跟踪图8 绕组线圈电流跟踪效果
闭环控制下系统的频率特性如图9所示。由图可见,在频率为1 750 rad/s时,系统增益幅值为-3 dB,相位差为-30.4°。由图可见,该系统具有良好的频率响应性能,能够满足电磁轴承控制系统对带宽的要求。
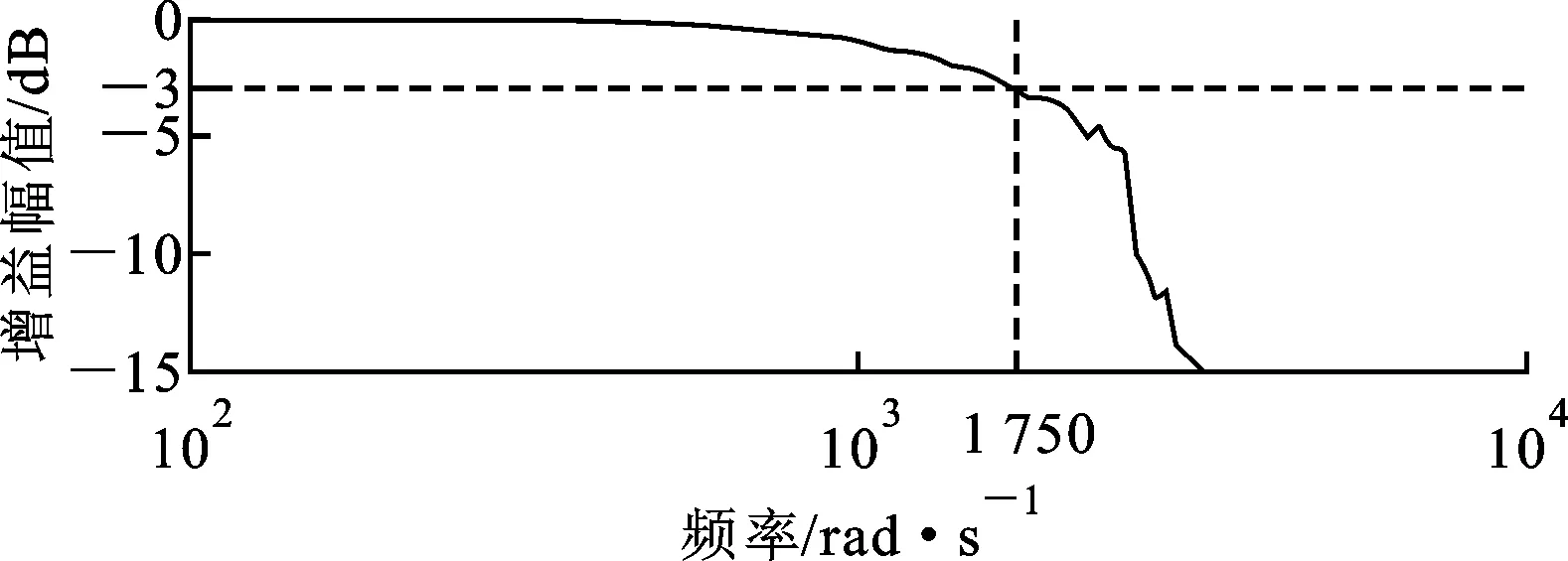
(a)增益幅值与频率的关系
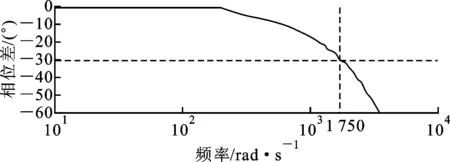
(b)相位差与频率的关系图9 闭环控制下系统的频率特性曲线
4 结 论
为进一步减小电磁轴承开关功率放大器的体积和损耗,并提高磁悬浮系统的效率,本文提出了一种基于对称结构SVPWM的三桥臂开关功放的实现方法。该方法采用对称结构三角波作为载波,与非对称结构下的单增锯齿波载波相比较,在纹波频率一定的情况下,可以将一个桥臂开关器件的工作频率降低一半,并实现一个周期内各路开关器件依次对称关断一次,以此改善了整个系统纹波电流的质量,减少了由此产生的电磁轴承涡流损耗。仿真与实验结果均表明,本文所提出的对称型三态SVPWM开关功放可满足电磁轴承系统低纹波电流和良好动态特性的要求,提高主动电磁轴承系统的性能。
[1] 施韦策G, 布鲁勒H, 特拉克斯勒A. 主动磁轴承基础: 性能及应用 [M]. 北京: 新时代出版社, 1997: 55-58.
[2] MASLEN E. Magnetic bearings [D]. Charlottesville, Virginia, USA: University of Vinginia, 2000.
[3] 李国栋, 张庆春, 徐秀玲. DSP在电磁轴承控制系统中的应用 [J]. 哈尔滨工业大学学报, 2006, 37(11): 1469-1471. LI Guodong, ZHANG Qingchun, XU Xiuling. Application of DSP in control system of AMB [J]. Journal of Harbin Institute of Technology, 2006, 37(11): 1469-1471.
[4] 谭兴国, 王辉, 张黎. 具有电压补偿的四开关并网逆变器等效SVPWM控制方法 [J]. 电力系统与控制, 2014, 42(1): 1-8. TAN Xingguo, WANG Hui, ZHANG Li. An equivalent SVPWM control method with voltage compensation for four-switch inverter [J]. Power System Protection and Control, 2014, 42(1): 1-8.
[5] 刘婷婷, 谭彧, 吴刚, 等. 基于SVPWM高转速永磁同步电机控制的系统的研究 [J]. 电力系统保护与控制, 2009, 37(12): 11-14. LIU Tingting, TAN Yu, WU Gang, et al. Simulating of high speed PMSM control system based on SVPWM [J]. Power System Protection and Control, 2009, 37(12): 11-14.
[6] 苏文军, 孙岩桦, 虞烈. 可控磁悬浮系统的转子周期性振动抑制 [J]. 西安交通大学学报, 2010, 44(7): 55-58.
SU Wenjun, SUN Yanhua, YU Lie. Rotor periodic vibration suppression for controlled magnetic levitation system [J]. Journal of Xi’an Jiaotong University, 2010, 44(7): 55-58.
[7] 李祥生. 新型磁轴承开关功率放大器的研究 [D]. 南京: 南京航空航天大学, 2005.
[8] 韩辅君, 房建成, 刘刚. SVPWM方法在磁轴承开关功放中的设计及应用 [J]. 电工技术学报, 2009, 24(5): 119-124. HAN Fujun, FANG Jiancheng, LIU Gang. Design and implementation of SVPWM switching power amplifiers for active magnetic bearing [J]. Transactions of China Electrotechnical Society, 2009, 24(5): 119-124.
[9] AHN H J, JEONG S N. Driving an AMB system using a 2D space vector modulation of three-leg voltage source converters [J]. Journal of Mechanical Science and Technology, 2011, 25(1): 239-246.
[10]李祥生, 邓智泉, 陈志达, 等. 电流型四桥臂开关功放控制方法 [J]. 电工技术学报, 2011, 26(2): 156-164. LI Xiangsheng, DENG Zhiquan, CHEN Zhida, et al. A control method of current mode four-leg switching power amplifier [J]. Transactions of China Electrotechnical Society, 2011, 26(2): 156-164.
[11]费清照, 邓智泉, 王晓琳, 等. 适用于磁悬浮轴承的新型五相六桥臂开关功放控制策略 [J]. 中国电机工程学报, 2012, 32(9): 124-131. FEI Qingzhao, DENG Zhiquan, WANG Xiaolin, et al. A control strategy of novel five-phase six-leg switching power amplifiers applied in magnetic levitating bearing systems [J]. Proceedings of the CSEE, 2012, 32(9): 124-131.
[12]ZHANG Jing, SCHULZE J O, BARLETTA N. Synchronous three-level PWM power amplifier for active magnetic bearings [C]∥Proceedings of the 5th International Symposium on Magnetic Bearing. Linz, Austria: International Portal Magneticbearings.org, 1996: 277-282.
[13]田拥胜, 孙岩桦, 虞烈. 涡流对电磁轴承开关功放纹波的影响 [J]. 中国电机工程学报, 2009, 29(24): 110-114. TIAN Yongsheng, SUN Yanhua, YU Lie. Effects of eddy current on ripple current of the switching power amplifier for magnetic bearings [J]. Proceedings of the CSEE, 2009, 29(24): 110-114.
(编辑 武红江)
A Control Method of Switching Power Amplifiers with Triple-Arm SVPWM
LI Rui1,SUN Yanhua1,QIU Hong2,DUAN Ruirui1
(1. Key laboratory of Digital Manufacturing Technology and Application, Xi’an Jiaotong University, Xi’an 710049, China;2. Shenzhen Key Laboratory of Electromagnetic Control, Shenzhen University, Shenzhen, Guangdong 518060, China)
A novel triple-arm switching power amplifier based on SVPWM theory is proposed to solve the problem that the traditional AMB (active magnetic bearing) that is controlled by two H-bridge switching power amplifiers have some shortcomings such as bulky size, high power consumption. The amplifier bases on the theory of SVPWM and the advantage of three-level control. Both symmetrical and asymmetrical SVPWM theories are applied for different carriers. Two different methods of SVPWM switching power amplifiers are established in the Matlab/Simulink environment and a novel three-leg switching power amplifier circuit system is realized by dSPACE. Both the theoretical results and experiment results show that the symmetrical SVPWM control algorithm improves the current response speed effectively, doubles the ripple current frequency and decreases its amplitude significantly. When the frequency is 1 750 rad/s, the system gain is only -3 dB. Thus the method meets the requirements of low ripple current and good dynamic, and improves the reliability of AMB system performance.
triple-arm space voltage pulse-width modulation; switching power amplifier; ripple current
2015-06-07。
李睿(1987—),女,博士生;孙岩桦(通信作者),男,副教授。
国家自然科学基金资助项目(51275386)。
10.7652/xjtuxb201512012
TH133.3
A
0253-987X(2015)12-0071-06
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
通信电源技术(2021年16期)2021-02-18
车辆与动力技术(2019年3期)2019-10-23
中国交通信息化(2019年11期)2019-08-13
科技视界(2018年24期)2018-01-03
科学与财富(2017年32期)2017-12-20
现代防御技术(2016年1期)2016-06-01
现代商贸工业(2016年35期)2016-04-09
新高考·高一物理(2016年1期)2016-03-05
