基于STM32 与人机的淤泥抓斗车控制系统设计
2015-03-06 01:31魏国亮
电子科技 2015年8期
李 辉,魏国亮
(上海理工大学 光电信息与计算机工程学院,上海 200093)
淤泥沉积和生活垃圾堆积是造成下水道系统堵塞的主要原因,清除疏通下水道系统可较好地解除大雨天路面积水的现象。疏通下水道系统的主要手段有:人工清理、真空泵清淤车、淤泥抓斗车等方式,由于劳动强度大且效率低,真空泵清淤车不能有效地清除生活垃圾,且抽吸泥浆的效率也较低,相比之下淤泥抓斗车的工作效率较前两者有较大提高,目前应用较多。当下淤泥抓斗车所采用的是手动换向阀控制设计理念,工作过程中需要多人协调配合才能完成。该设计自动化理念较少,未能将人从繁杂的劳动中解放出来。针对上述情况,本文提出了一种以STM32F103 控制器为核心,采用遥控装置和人机界面进行控制的自动化控制系统。该系统通过遥控装置控制抓斗车的臂架和抓斗,操作人员可站在合适的位置操作抓斗车工作,控制系统当中设置有记忆功能,操作人员只需完成一次操作动作后便可通过记忆设置来自动进行,全程操作只需1 人即可,监控和报警则由人机界面完成。该系统自动化程度较高且快速高效,可较好的帮助市政部门解决下水道清淤问题。
1 系统总体设计方案
该控制系统选用低功耗的32 位微处理器STM32F103RBT6 作为主控芯片,通过直线位置传感器和压力传感器分别完成对抓斗的位置记忆和液压控制回路压力的检测[1]。系统的控制输入信号由人机界面和遥控给出,其中人机界面还兼具液压压力和抓斗位置显示功能,在两值超限时给出报警信号,对于误操作也会给出相应的报警信号,其与控制器之间通过RS485 总线进行通讯。系统输出驱动相应的电磁阀来执行预定动作。系统总体设计框图,如图1 所示。
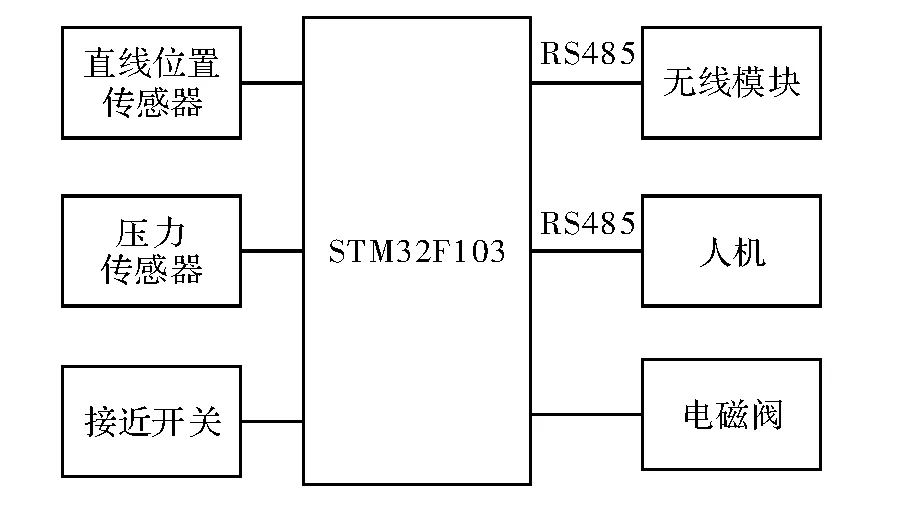
图1 系统总体设计框图
2 硬件设计
2.1 控制器模块
控制器模块是整个控制系统的核心,其主要任务是利用传感器采集的数据和控制输入信号做出相应的处置,并发送输出信号到对应的执行单元与显示装置。本系统采用由意法半导体公司推出的基于ARM Cortex-M3 内核的STM32F103RBT6 增强型32 位处理器。其工作频率最高可达72 MHz,内置高速存储器,其中闪存为128 kB SRAM 为20 kB,丰富的增强型I/O 端口和联接到2 条APB 总线的外设。包含2 个12 位的A/D、3 个通用16 位定时器和1 个PWM 定时器,还包含标准和先进的通信接口:多达2 个I2C 接口和SPI 接口、3 个USART 接口、一个USB 接口和一个CAN 接口[2-3]。STM32 较市场上同种类的单片机具有价格低、功能强、使用简单及开发方便等优势。
2.2 压力与位置信息测量
液压是淤泥抓斗车工作的动力来源,液压系统的压力情况决定着抓斗车能否正常工作,为确保抓斗车是在正常的压力范围内工作,须对液压系统的工作压力进行测量与预警。压力传感器选用OMEGA 的PX309,其具有全坚固耐用的固态设计以及高稳定性、低漂移的特点,测量范围为0 ~10 000 PSI,精度为0.25%,输出信号有0 ~5 V 和4 ~20 mA 两种可选,符合抓斗车的工况需求。其输出通过STM32 的ADC 端口与系统相连,系统内部服务程序将ADC 端口的采样值变换为液压系统压力值,然后传送给人机。
抓斗的位置信息是抓斗车能实现自动控制的重要参数之一,本设计针对抓斗的特点选用图尔克公司的杆状系列磁感应直线位移传感器,所选传感器型号为LTX2000M-R10-Li0-X3-H1151,其适合于安装在液压缸中,最高耐压可达680 bar(1 bar=100 kPa),测量范围为0 ~2 000 mm 且测量范围可调,分辨率为16位,输出为4 ~20 mA,符合抓斗车的工作需求。其输出通过STM32 的ADC 端口与系统相连,系统内部服务程序将ADC 端口采用值变换为位置值,然后再传送给人机。
2.3 遥控模块
遥控控制使得操作变得灵活、简单,操作人员经过简单培训便可上岗作业,其不仅克服了以往抓斗车需要多人协调控制的缺点,且减轻了操作人员的劳动强度。遥控单元采用STC89C51 控制器作为主控单元,其具有体积小、功能全、性价比高等优点;无线模块选用nRF2401,其具有功耗低、频段宽、工作可靠等优点。两者搭配技术上实现简单,且经济可靠[4-6]。51 单片机与nRF2401 的端口连接原理图,如图2 所示。

图2 51 单片机与nRF2401 端口连接图
2.4 数据通信模块
遥控控制和人机可视化操作与监控是本设计的两大特色,遥控和人机两者优势的发挥须建立在畅通和快速的数据通信基础之上,为了保证数据通信的可靠性本系统针对两者的特点选用方案如下:针对无线通讯,本设计采用了一套独立的数据收发单元,该单元基于51 单片机建立,无线模块选用nRF2401,无线模块收到的数据预先经过51 单片机处理,然后通过串口发往主控制器,由此可减轻主控制器的负担提高通信效率[7]。人机与主控制器的数据通信通过RS485 总线进行,主控制器侧的总线收发器选用TI 的ISO3080 芯片,该总线收发器采用电容隔离式设计方案,具有体积小、双向实时通信能力强等优点。
2.5 人机界面
上位机选用台达人机DOP-B10S411,该人机带有3 个串行通讯口、1 个USB Host1.1 和1 个USB Client2.0,其中COM2 支持RS232 和RS485 两种通讯方式,USB Host 口支持鼠标操作和从U 盘读取文件。台达人机通讯采用标准Modbus 通讯协议,可方便地与单片机和其他编程设备进行通讯连接[8-9]。与人机配套的画面编辑软件含有丰富的元件库,这使得画面编辑变得简单,也便于换面的升级维护。
3 软件设计
系统要求可使用遥控和人机来控制抓斗的相应动作,并能进行自动切换。在人机中需要显示液压系统的压力值和抓斗的位置,对压力和位置超限及时给出相应报警信息,误操作对应有警告和报警两种级别的信息。
3.1 主程序
在主程序中首选进行系统初始化配置,然后选择控制信号来源,接着进行中断设置,开串口和定时器中断,主程序流程如图3 所示。

图3 主程序流程图
3.2 中断程序
系统中应用了定时和串口两种中断,在定时中断子程序中系统向人机发送系统状态值,如油压压力值、抓斗位置值、误操作状态标志等,同时发送读取人机中寄存器值的命令,以此判断当前操作。定时中断子程序流程图,如图4 所示。
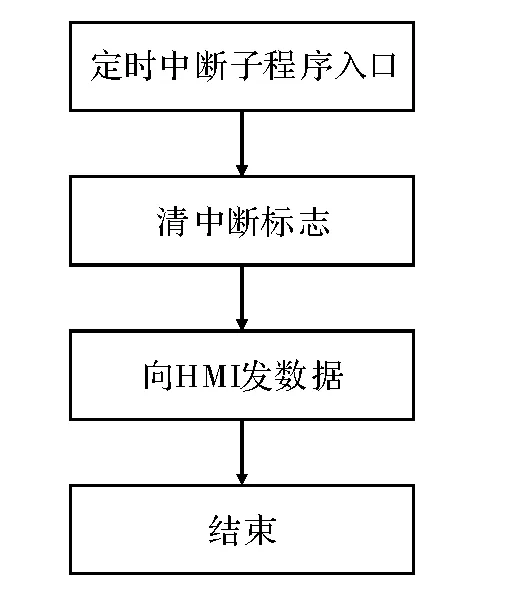
图4 定时中断流程图
人机在收到来自控制器的信号后会立即回送相应的信号给控制器,控制器收到信号后进入串口中断,在中断服务子程序中完成对数据的处理并调用动作处理函数执行控制信号对应的动作。人机信号中断服务子程序,如图5 所示。
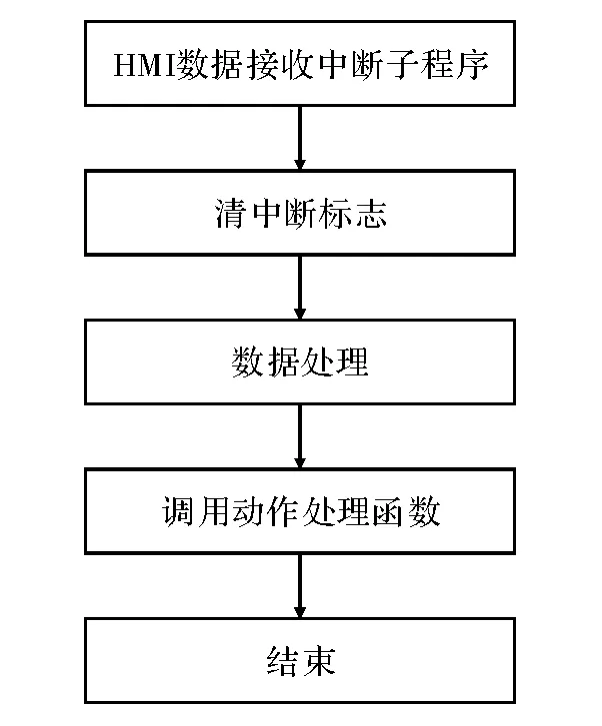
图5 人机信号中断程序流程图
控制器通过无线收发模块收到遥控器传来的数据进入串口中断,在该中断程序中系统会对收到的数据进行处理,然后发送一个对应的数据帧给遥控器,作为对此次遥控器发送信号的响应,具体过程如图6所示。
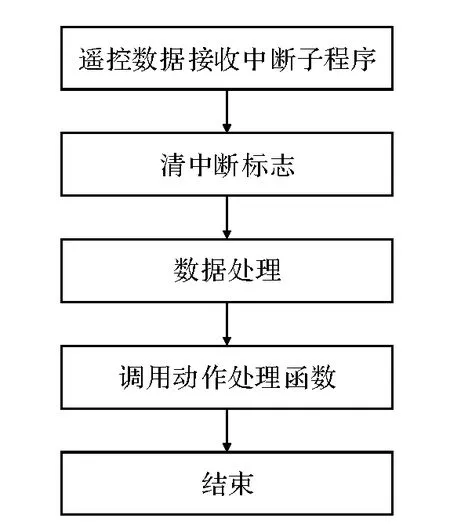
图6 遥控数据接收中断子程序
3.3 动作子程序
由于不确定初次操作时下水道井口所处车身位置,第一次操作需工作人员以手动的方式完成,在手动过程中系统会自动学习动作过程并建立相关标志位,待手动完成第一次工作后便可选择进入自动模式进行自动操作,此时工作人员只需关注人机上系统状态值即可。动作子程序流程图,如图7 所示。
4 应用效果
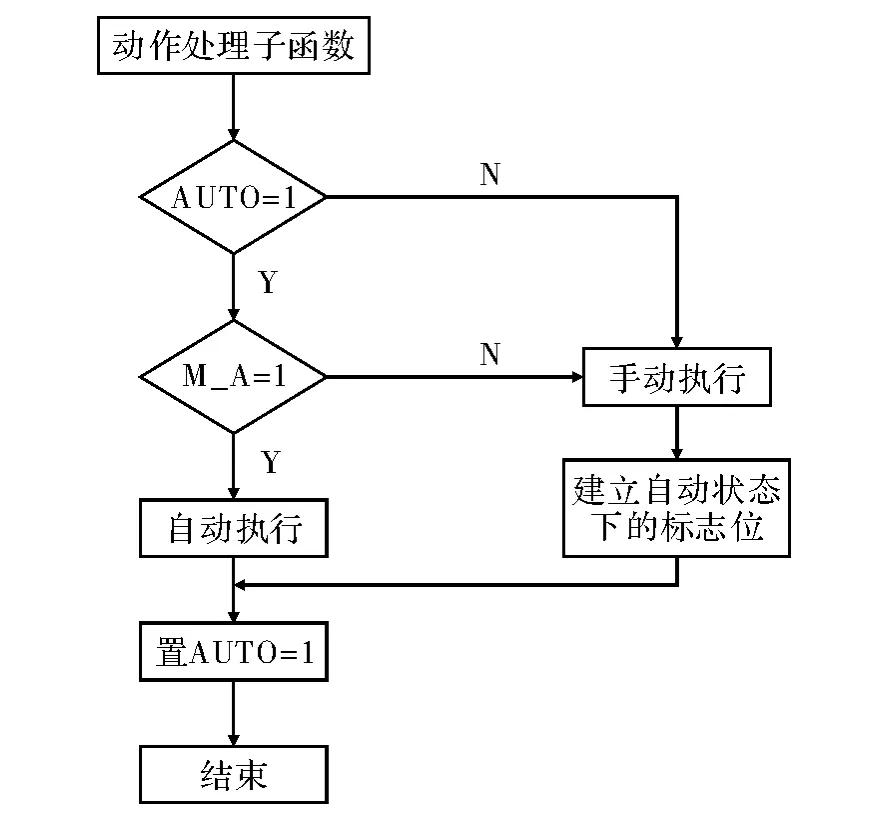
图7 动作子程序
经现场调试,该控制系统已成功应用到淤泥抓斗车的抓斗控制当中。现场测试报告和用户使用数据均表明,该控制系统能较好地完成抓斗车的控制工作,具体可从以下几方面进行验证:
(1)淤泥抓斗车的控制变得灵活。传统的淤泥抓斗车在抓斗控制系统上均采用手动液压阀控制体系,系统可靠性虽较好,但操作上欠缺灵活性,在机械化走向信息化的时代背景下显得过时。本控制系统应用电磁换向阀替换原有的手动换向阀,应用具有遥控控制功能的电控系统控制电磁换向阀完成抓斗控制工作。在此过程中需要进行的机械改造较少,且改造较为容易,并较好的延续了之前系统的可靠性优势,使得本系统兼具电控的灵活性与原有系统的可靠性。
(2)工作效率大幅提高。现场测试时淤泥抓斗车的抓斗在自动模式下完成一次淤泥抓取工作需要的时间在25 ~35 s 之间,而从市政部门提供的数据来看,抓斗车操作工手动操作完成一次抓取工作所需的时间在1.5 ~2.5 min 之间,工作效率较人工操作提升了4 ~5 倍。
(3)系统运行状态可视化。本系统当中引进了人机单元,人机画面集成了整个电控系统的各种功能,可对当前系统状态进行实时监控。人机系统设置了丰富的报警功能,例如液压系统压力报警、油温报警,臂架伸缩位置超限报警,抓斗位置超限报警等,这些报警信息不仅可帮助操作人员掌握抓斗车工作状态,且方便查找和排除机器故障。
(4)节省劳动力、降低劳动强度。应用手动阀操作时需2 ~3 人协同才能完成淤泥抓斗车的淤泥抓取操作,应用本系统后只需1 人,且本系统操作简便,对抓斗车司机进行简单培训即可上岗作业。本系统的自动抓取功能可让操作工进入到自动模式后回到驾驶室,利用人机监视整个系统的工作状态,这一点在恶劣的天气状况下显得尤为重要。
5 结束语
本文提出了应用基于STM32 的淤泥抓斗车控制系统,该设计方案具有良好的人机交互、可遥控操作、自动化程度高和可靠性强等优点。包含有丰富的警告和报警设置为故障排除提供方便,同时也为系统稳定运行提供了保障。从长远来看,工程机车的自动化提升是一大趋势,本控制系统的设计理念可移植到众多工程机车的控制当中。因此,该种思想将会拥有广阔的应用前景和良好的经济效益。
[1] 蔡亮,王晓荣,诸葛云,等.基于STM32W 的液压支架压力监测系统[J].仪表技术与传感器,2014(6):96-98.
[2] 王永虹,徐炜,郝立平.STM32 系列ARM Cortex-M3 微控制器原理与实践[M].北京:北京航空航天大学出版社,2008.
[3] 李宁.基于MDK 的STM32 处理器应用开发[M].北京:北京航空航天大学出版社,2008.
[4] 朱慧彦,林林.基于MCU 和nRF24L01 的无线通信系统设计[J].电子科技,2012,25(4):81-83,91.
[5] 夏骏,王甜.基于STM32 和GSM 的远程遥控定时开关装置[J].电子科技,2013,26(1):112-115.
[6] 丁彦闯,韦佳宏,刘广哲.基于nRF2401 的分布式测温系统设计[J].电子测量技术,2008(12):107-109.
[7] 孔凡雪,李世光,高正中,等.Design of high-voltage electrostatic generator based on STM32[J].Journal of Measurement Science and Instrumentation,2011(1):72-74.
[8] 李铁成.基于Modbus 协议的台达人机界面异构通讯[J].可编程控制器与工厂自动化,2009(5):84-85.
[9] 姜凤武,王杭.基于MODBUS 协议实现单片机与变频器的通信[J].自动化技术与应用,2006(4):78-79.
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-08-31
文萃报·周五版(2022年24期)2022-06-21
南都周刊(2021年3期)2021-04-22
海外星云(2016年7期)2016-12-01
太空探索(2016年5期)2016-07-12
中国科技纵横(2015年2期)2015-11-05
河北工程大学学报(自然科学版)(2015年3期)2015-02-27
科学中国人(2014年16期)2014-11-20
中国新技术新产品(2014年3期)2014-03-24
筑路机械与施工机械化(2014年7期)2014-03-01