主动雷达航迹关联方法及应用
2015-03-06 01:31邹庆秋
电子科技 2015年8期
邹庆秋,杨 欧
(中国人民解放军海军701 工厂 研发部,北京 100015)
在现代对海警戒雷达系统中,一般沿海岸线配置多种传感器对目标进行探测,组成雷达网络,以扩大对海监视范围。从不同的信息模式对目标特征进行描述,其中主动雷达能给出目标较精确的距离、方位等位置信息,是最重要的目标探测设备[1]。但单个主动雷达的探测范围有限,为了扩大覆盖范围,将多个主动雷达的探测信息通过网络发送至同一个处理中心,这样既能得到全方位的目标信息,又能采用航迹关联技术将多个主动雷达的航迹信息进行关联判断处理,最终得到稳定、可靠全面的目标态势信息。为了提高整个雷达系统的目标探测性能,有必要建立主动雷达信息融合系统。在这种分散部署的雷达融合系统中,信息的关联处理将是关键所在[2]。
本文提出了一种主动航迹关联方法,该种关联方法主要包括两部分:(1)基于基准航迹的航迹关联融合结构,这种关联结构可有效避免系统航迹混乱引起的关联质量下降问题,且能迅速的从错误关联中恢复。(2)航迹关联判断方法及流程,并最终给出了该关联方法在某警戒雷达信息系统中的应用。
1 基准航迹关联融合结构
传统的分布式主动航迹关联融合结构分为两种:(1)传感器到传感器的航迹关联融合结构。来自不同传感器的航迹相互之间进行关联和融合以得到系统航迹。在这一过程中,不利用系统航迹以前的信息,如图1所示。(2)传感器到系统的航迹关联融合结构。无论何时接收到一组传感器航迹,系统航迹均外推到传感器航迹的时刻,且与最新接收到的传感器航迹进行关联融合处理,如图2 所示。
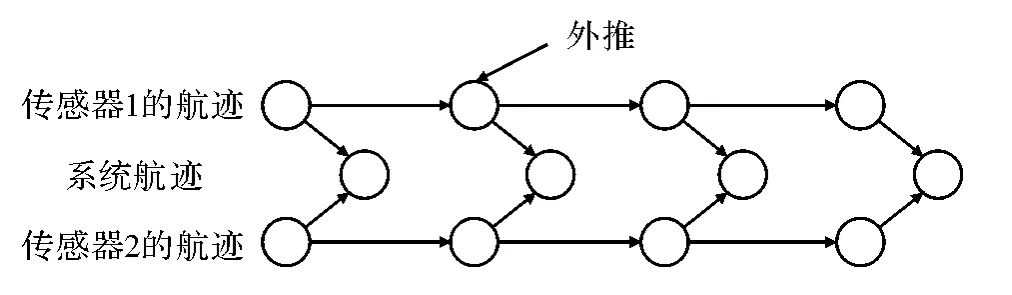
图1 传感器到传感器的航迹关联融合
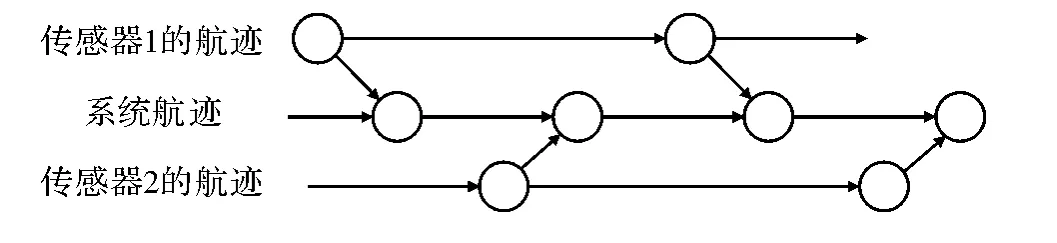
图2 传感器到系统的航迹关联融合
在第一种关联结构中,任意两个传感器所属航迹之间都要做关联处理。当传感器数量和目标数量增加时,计算量迅速增大,如传感器数量为n,目标数为m,则一次关联更新,要做m2n(n-1)/2 次关联处理,大幅影响了关联实时性。且当传感器数量多于两个时,易造成关联逻辑混乱。例如,A 航迹与B 航迹关联,B 航迹与C 航迹关联,但C 航迹又有可能不与A 航迹关联。同时,由于完全不利用系统航迹以前的信息,输出的系统航迹存在较大的跳跃性,各个时刻的系统航迹点没有连续性。
对于第二种关联结构,利用传感器航迹与系统航迹进行关联融合处理。在发生误关联的情况下,系统航迹本身会输出较混乱的航迹,此时利用系统航迹关联,关联效果较差。
分析造成这两种关联融合结构的缺陷所在,第一种关联结构在于其完全放弃了以前系统航迹的信息,第二种关联结构与第一种相反,关联完全依赖于系统航迹。针对这两种关联结构的缺点,若要提高关联性能,可得出结论:(1)系统航迹必须能相对稳定的存在。(2)既然系统航迹本身会输出较为混乱的航迹,因此不能直接利用系统航迹来做关联判断。依据此两点结论,本文提出了一种新的航迹关联融合结构,如图3所示。
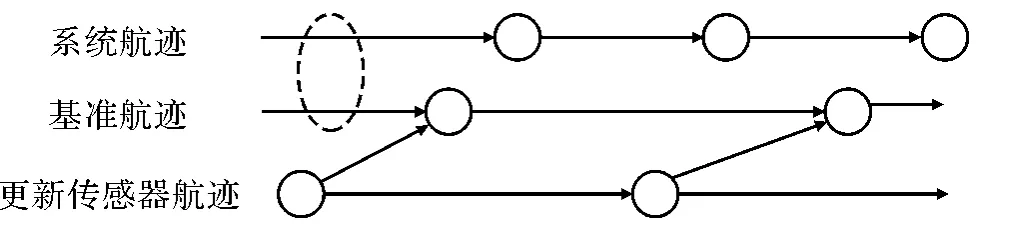
图3 本文航迹关联融合结构
每条系统航迹由一条或多条传感器航迹融合而成,从这些传感器航迹中选择一条作为系统航迹的基准航迹,以基准航迹作为系统航迹与更新传感器航迹之间作关联判断的媒介,而不是直接利用系统航迹与输入航迹进行关联判决。当发生错误关联,系统航迹发生混乱时,基准航迹——即传感器航迹还是稳定存在的,因此这种关联结构可有效地避免系统航迹混乱引起的关联质量下降问题,而且能迅速地从错误关联中恢复。同时,由于关联结果不完全依赖于传感器航迹的两两关联判决,而是利用与系统航迹关联的传感器航迹作为基准航迹进行关联判断,这种方式也解决了可能的关联逻辑混乱问题。
2 关联判断方法及流程
2.1 关联度量值计算方法
根据两条航迹的位置和传感器的测量误差,计算统计关联度量值

其中xi,yi,i=1,2 分别为两个目标相对于融合中心的x,y 方向坐标。为x,y 方向的方差,由传感器的距离误差和方位误差计算得到
关联度量值[3-4]在时间上作累加

本次关联度量值的加权值与上次计算所间隔的时间段的长度有关。
当初次计算到此次计算时间间隔大于预先设定的某个时间窗时
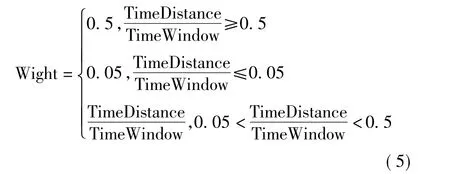
当初次计算到此次计算时间间隔小于预先设定的某个时间窗时[5]

2.2 单次关联判断方法
单次关联判断采用最近邻域航迹关联算法。N 条基准航迹与M 条传感器航迹相关处理流程,如图4所示。
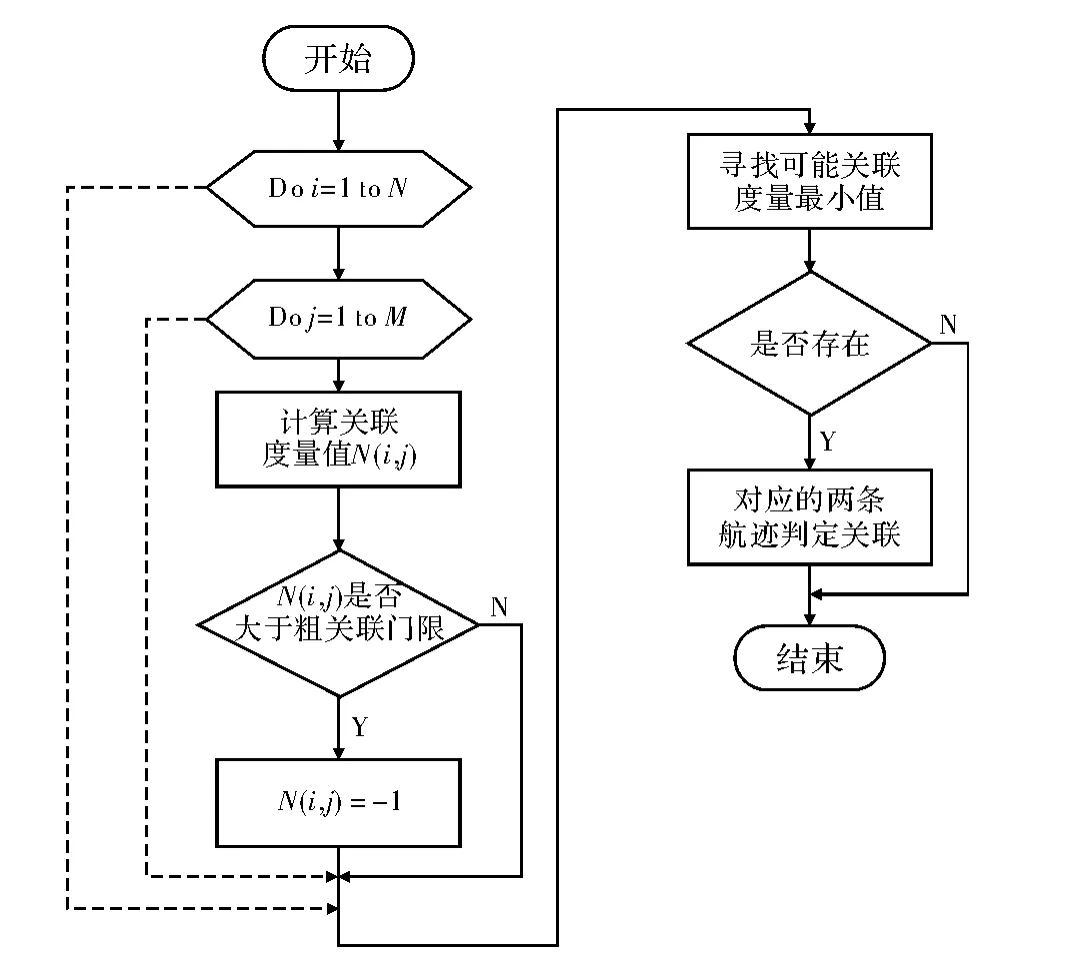
图4 单次关联判断流程
2.3 关联结果判断
历史关联状态数据结构的设计如图5 所示。

图5 历史关联状态数据结构
单次判断关联,为1;不关联,为0。
例:若最新一次关联判决为成功判决,则数组左移一位,将最后一位设定为1,如图6 所示。

图6 数组左移一位后
假设历史关联状态数据保存8 个两条航迹最近的关联判决结果,若这数组的8 个数中,有6 个数为1,则判定两条航迹关联。
根据最近几次关联判断,给出最后的关联结果;当有多条航迹满足关联关系时,选取关联质量最大的一组;当有多条满足关联关系,且关联质量一致时,则选取累计关联度量值最小的一组。
3 主动雷达信息融合系统
3.1 工作流程
设计主动雷达信息融合系统,实现上述主动雷达航迹关联方法的应用,该系统可处理多部雷达的航迹信息,首先对各航迹信息进行坐标变换,统一到以融合中心为原点的极坐标上,然后采用基准航迹关联结构对多部雷达的航迹进行关联判断,计算度量值,并确定单次判断关联结果,将关联结果在时间上进行累积[6],最终确定两条航迹的关联关系并输出融合结果,同时存储到融合航迹库[7-9]。该系统主要工作流程如图7所示,图中明确指出了基准航迹关联结构和关联判断方法在主动雷达信息融合系统中的应用。
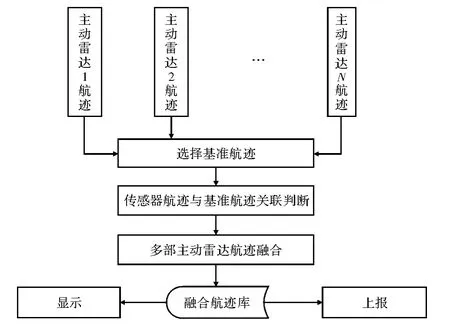
图7 主动雷达信息融合系统主要工作流程
3.2 实验数据分析
在实验室环境下,模拟20 个目标船只,分别由两部主动雷达探测,将各自的航迹信息发送给主动雷达信息融合系统进行关联处理,各时刻的航迹关联正确率结果如表1 所示,航迹关联正确率可达到90%以上,运行稳定,且可靠性较高[10-11]。

表1 正确率结果
4 结束语
本文通过对传统分布式主动航迹关联融合结构的分析,指出了传统结构的不足,从而提出了一种基于基准航迹的航迹关联结构,该关联结构有效地解决了关联质量下降以及关联逻辑混乱等问题,同时给出航迹关联判断方法和流程,并设计主动雷达信息融合系统,实现上述航迹关联方法的应用,目前该系统运行稳定,效果良好。
[1] 王晓岭.数据融合系统中航迹关联和属性融合的研究[D].西安:西安电子科技大学,2006.
[2] 康耀红.数据融合理论与应用[M].西安:西安电子科技大学出版社,1997.
[3] 程跃兵.多传感器多目标航迹关联与融合算法研究[D].南京:南京理工大学,2010.
[4] 侯雪梅.多传感器多目标航迹关联算法研究[D].西安:西北工业大学,2006.
[5] 何友,王国宏,陆大,等.多传感器信息融合及应用[M].北京:电子工业出版社,2000.
[6] 何宝林.多雷达航迹关联与融合技术研究[D].北京:北京工业大学,2010.
[7] 于海霞.AIS 与雷达数据融合方法的研究[D].大连:大连海事大学,2006.
[8] 孙仲康.雷达数据数字处理[M].北京:国防工业出版社,1983.
[9] 蔡希尧.雷达系统概论[M].北京:科学出版社,1983.
[10]杨少华,赵国庆,董春曦.远程预警雷达中的航迹处理技术[J].电子科技,2009,22(10):66-69.
[11]杨科技,郑成波,傅其祥,等.一种雷达组网融合实时处理系统设计与实现[J].电子设计工程,2011,19(18):130-133.
猜你喜欢
新世纪智能(数学备考)(2021年9期)2021-11-24
青年歌声(2019年12期)2019-12-17
当代陕西(2019年15期)2019-09-02
劳动保护(2018年8期)2018-09-12
学苑创造·A版(2018年11期)2018-02-01
北京航空航天大学学报(2017年7期)2017-11-24
读者(2017年5期)2017-02-15
北京航空航天大学学报(2016年6期)2016-11-16
公民与法治(2016年19期)2016-05-17
读者·校园版(2015年7期)2015-05-14