
有人机/无人机协同空地攻击效能评估的综合指数模型*
2015-02-23 09:47董彦非张旺崔巍
火力与指挥控制 2015年2期
董彦非,张旺,崔巍
(南昌航空大学飞行器工程学院,南昌330063)
有人机/无人机协同空地攻击效能评估的综合指数模型*
董彦非,张旺,崔巍
(南昌航空大学飞行器工程学院,南昌330063)
研究了未来有人机/无人机协同空地攻击的典型作战模式,然后根据混合编队的作战过程和特点,提出了一种建立有人机/无人机协同空地攻击效能评估的综合指数模型;同时确定了综合指数模型中各分系统和分项能力的评估模型。最后以6种有人机和6种无人机的协同空地攻击效能评估为例计算并检验了模型的可用性。
有人机/无人机协同,综合指数模型,效能评估,效费分析
0 引言
进入21世纪,随着无人机作战能力的应用,无人机一改在战场上仅仅充当辅助角色的状况,除了进行空中侦察、战场监视、通信中继和战斗毁伤评估等作战支援任务外,还能执行压制敌方防空系统(SEAD)、对地攻击,甚至对空作战等主要作战任务[1-3]。无人作战飞机(UCAV,以下简称无人机)不仅能在未来战场上与有人战斗机并肩作战,甚至能在某些情况下替代有人机,成为未来空中作战的主力武器装备之一。人在环的无人作战模式将成为未来空中作战的重要模式[4],无人战斗机将逐渐主导空中作战,成为空中优势的主力军。
由于无人机的智能化水平不可能在短期内达到自主作战的程度,在未来相当长的一段时间内,有人机和无人机在空中作战中的关系仍将是控制与被控制以及功能相互补充的关系。美国国防部认为,在未来战争中,有人机和无人作战飞机及其他无人支援飞机联合编队协同作战将成为一种新的作战模式[5-7]。
当前,无人机与有人机协同作战的模式已成为无人机作战运用研究中的一大热点,引起了世界各国极大的研究兴趣[1,8-9]。有人机/无人机协同空中作战是以有人机作为指挥机,携带制导武器的无人机作为攻击机,指挥机位于敌机的火力打击范围之外,攻击机处于指挥机的监控空域,在数据链信息的支持下,攻击机和指挥机通过密切协同来完成信息获取、战术决策、指挥引导、武器发射和武器制导等过程达成作战任务。
对有人机与无人机协同作战效能的研究不仅是未来空中作战研究的需要,也是航空武器装备研制的基础和出发点,对未来航空装备的发展具有重要的指导作用。
1 典型作战模式
在有人机/无人机混合编队中,有人机作为编队中的长机,负责混合编队的指挥控制和辅助攻击功能;多架无人机(无人机具有良好的编队任务能力,智能化水平至少相当于美国无人机智能评级的第5级,Group Coordination,机群协同)作为编队中的僚机,主要作为射手和弹药库以及执行战场侦察功能。如图1所示。

图1 有人机/无人机协同对地作战示意图
混合编队对地实施协同攻击任务前,先由地面或空中指挥中心或通过联合战术信息分发系统实现对混合编队的指挥引导。有人机首先从指挥控制中心和无人机系统获取大量战场信息,然后对所得到的信息进行综合处理,完成战场态势的感知。同时根据作战任务和作战规划、战场态势、系统可用资源等多种因素,由有人机完成有人机/无人机混合编队协同作战系统的作战指挥、控制和整个系统的任务管理、资源调度,并将决策控制指令发送给无人机,无人机完成攻击目标的火控计算、武器发射条件判断、武器发射前的装订参数计算、武器的发射控制及发射后的制导和攻击效果评估等任务。
1.1 协同作战过程的4个阶段
这种协同作战方式缩短了战场数据的传输距离和信息延迟,提高了战场信息的准确度、抗干扰能力和无人机的实时性能。这种混合编队实施协同作战方式,实现了有人机/无人机混合编队系统的信息与资源共享、统一的攻击协调及指挥控制,使得整个战场资源得到了合理的分配和利用,增强了整个作战系统执行任务的快速性、实时性和灵活性,有利于实现作战系统的实时战术决策与实时的任务/路径规划。协同作战过程可以概括为4个阶段:
1.1.1 任务装订及战区引导
指挥控制中心通过对目标区域的卫星图像,目标信息等情报进行分析后,决定使用1架有人作战飞机协同3架“察打”一体的无人机执行对地目标的攻击任务。
混合编队在地面进行好任务/路径的数据装订之后,根据作战系统中的指挥控制站的命令起飞,并由指挥控制站将有人机和无人机引导到指定空域进行集结、编队,按照预定航路飞向任务区域。
1.1.2 对目标实施攻击
到达任务区域后,有人机根据战场信息对3架无人机进行任务分配,并将任务分配结果传送给无人机。执行攻击任务的无人机接到攻击指令之后,开始进行火控计算,火控计算机根据传感器系统和其他系统信息,产生火力和飞行控制指令,并进行武器的管理和发射,最终投放机载武器实施攻击。
执行侦察监视任务的无人机在攻击型无人机对地进行攻击时,利用机载侦察系统监视战场,并侦察信息反馈给有人机。在完成第一轮对地攻击任务之后,无人机群转入待命状态,等待有人机进行任务完成评定和下一步指令。
1.1.3 战后评定
有人机在得到无人机反馈的战后侦察监视信息后,对比战前和战后的图像并进行信息融合,判断攻击效果和任务完成情况;并根据无人机受到地面防空设施攻击的损伤情况、剩余载弹量和燃油等情况,及时得出此轮无人机的战后损伤评估以及威胁评估结果。
1.1.4 再次攻击或退出战斗返回基地
有人机根据战后评定结果对无人机作出相应的再次攻击或者返航的命令。
有人机/无人机协同对地攻击流程示意图如图3所示。

图2 有人机/无人机协同对地作战流程示意图
1.2协同作战特点
根据典型有人机/无人机混合编队协同作战模式可知,与有人机或者无人机单机效能评估相比,有人机和无人机协同的机群效能具有以下特点:
①有人机指挥控制能力重要性突出;
②无人机自主智能有重要影响;
③对数据链系统抗干扰和稳定性有较高要求;
④机群中飞机数量与整体作战能力正相关。
根据以上特点,混合机群效能评估可以考虑构建基于各能力之间相关性的加权和模型。该模型中的有人机能力除了常规战斗机的评估方法外,注重指挥和控制能力相关参数的处理,在模型中要突出体现。无人机能力中智能化程度需要重点考虑,重视数据链遭到干扰后无人机自主执行预定任务的能力。
2 空地攻击效能评估指数模型
根据有人机/无人机协同对地攻击典型作战模式可知,有人机的指挥控制能力与无人机的自主智能(智能化水平)相关,数据链能力与有人机的指挥控制能力相关,而起辅助攻击作用的有人机单机对地攻击能力与以上能力无相关性。由此,建立有人机/无人机混合编队协同对地作战能力E的数学模型为:

式中:DL为编队系统数据链能力;ACC为有人机指挥决策能力;IUAV为无人机自主智能;CM为有人机作战能力;CUAV为无人机作战能力;n和m分别为混合编队中无人机和有人机的架数。
式(1)中各分项能力指数上边的“”号表示进行标准化处理(以下同),并以此值作为该项指标的指数值。标准化可以采用非线性S型可导函数归一法,这是基于对武器装备性能参数物理意义上的考虑[10-14]。
有人机单机作战能力包括:对地攻击能力、突防能力和航程等。有人机作战能力CM的计算模型为:

式中:CF为对地攻击能力;CE为电子对抗能力;Pe为突防能力;L为航程。
无人机作战能力包括:侦察监视能力、对地攻击能力、突防能力和电子对抗能力等。无人机作战能力CUAV的计算模型为:

式中:CR为对地侦察探测能力。
数据链的性能是对平时和战时运用环境条件下,数据链发挥的战术信息采集、数据处理能力的度量;或者说是衡量数据链将规定的战术信息,在规定的时间按照规定的收发规则,以规定的信息格式发送到规定的地方,并采用规定的算法在规定的时间内完成对战术数据处理的能力。数据链性能可以由节点连通性、有效网络容量、时效指标最终体现。

式中:nr为接收节点数目;nt为发送节点数目;Mt为节点发送的消息;Mr为节点接收的消息;Qeff为有效数据传输速率;tp为单位传播时间;pi为第i条信息传递的时效性的度量。
有人机的指挥控制能力可表示为:
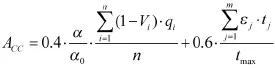
式中:α为接收信息中正确发现的目标数量,α0为客观态势中实际的目标数量,则α/α0可表征为信息完备性指标;Vi为接收信息中的单个目标特征与客观态势中相应目标特征的偏离程度,即(1-Vi)为单个目标感知态势的准确性指标;qi作战需求时限内信息处理融合的时效性;εj为第j个从决策作战行动采取后实际完成任务的程度;tj为单个任务决策周期;tmax为决策允许时间。
无人机智能IUAV水平按照2000年美国海军研究办公室和美国空军研究实验室共同定义的自主控制等级(AutonomousControlLevel,ACL)的10个等级[6],作为标准衡量无人机在自主程度方面的水平:
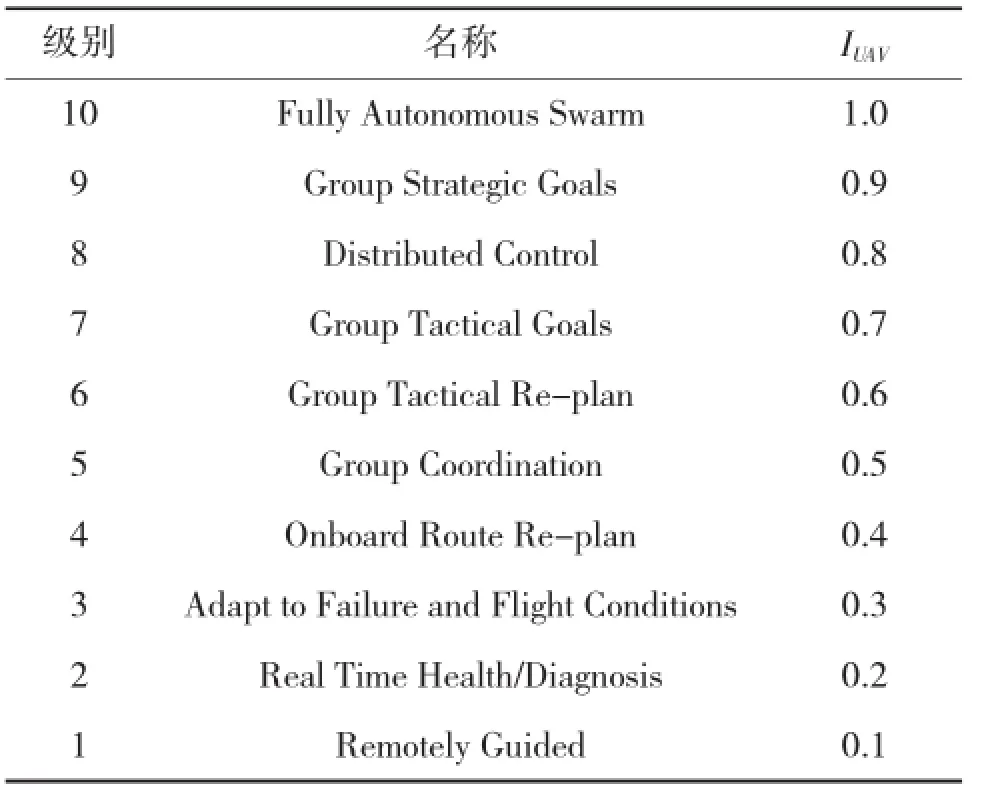
表1 无人机智能水平取值
突防能力Pe与装甲系数Ar、突防机动能力(用最大允许过载nymax代表)、突防最低高度Hp和突防速度Vp等有关:

作战飞机生存力系数可用雷达反射截面(RCS)、电子对抗能力系数εe和飞机的几何尺寸为主要代表因素。计算模型为:

式中RCS(m2)指迎头或尾后方位120°左右之内的对应3 cm波长雷达的平均值;S为机翼面积(m2),Lall为飞机全长(不含空速管的长度,m)。
模型中电子对抗能力系数εe、装甲系数Ar以及其他未说明的参数取值方法均可参考文献[10-14],并根据现代作战实际和对地攻击武器形态的发展合理修正。
3 算例与分析
设有6型有人机(M1,…,M6)和6型无人机(U1,…,U6)均可以混合编队。无人机自主智能水平达到ACL5(Group Coordination)以上,混合编队通过数据链,由1架有人机指挥控制3架无人机进行对地攻击任务。
首先根据有人机和无人机性能,分别计算出有人机单机和无人机单机作战效能(表2和表3);然后,计算出各有人机指挥控制能力和数据链能力(表2);最后综合计算得到混合编队协同作战效能(表4)。

表2 有人机单机对地作战效能评估数据与结果

表3 无人机单机对地作战效能评估数据与结果
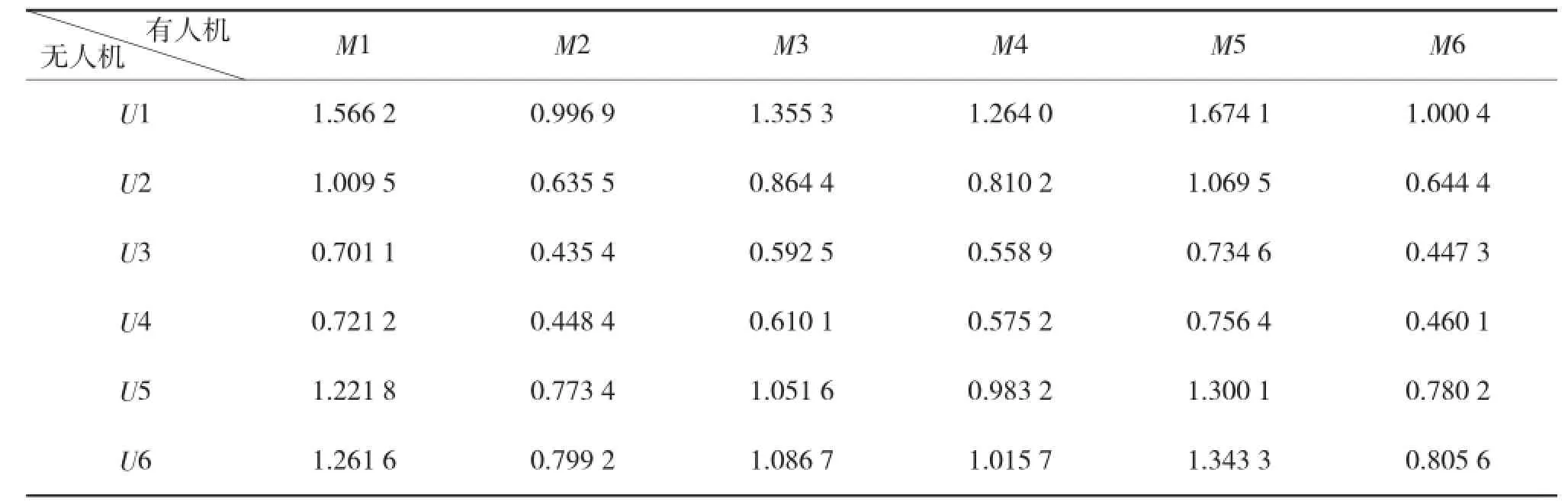
表4 不同混合编队方案综合作战效能评估结果
表4中数值为1架有人机指挥控制3架无人机对地攻击效能(如M1、U1对应的1.566 2即为1架M1指挥控制3架U1对地攻击的效能值),根据计算结果可知:
(1)无人机U1和U6具有优良的单机作战效能以及良好的自主智能,多数有人机与其进行编队的都能具备良好的协同对地攻击效能,而有人机M2和M6的指挥控制能力和数据链性能较差,它们分别与U1和U6的协同对地作战效能较差。
(2)无人机U3和U4的单机作战效能和自主智能都很差,协同对地攻击难以达到理想的效果(设定协同作战效能E达到0.95以上为达到理想的攻击效果)。
(3)有人机M1和M5具有优良的单机作战性能和指挥控制能力,以及良好的数据链能力,故它们和单机性能、自主智能优良的无人机U1、U2、U5和U6进行协同对地攻击都能达到理想的攻击效果,但与单机性能、自主智能较差的U3和U4协同则不能达到理想的攻击效果。
(4)性能优良的无人机U1和U6与多数有人机进行编队对地攻击都能达到理想的攻击效果;而性能优良的有人机则只是和性能优良和良好的无人机进行编队对地攻击才能达到理想的攻击效果。有人机/无人机混合编队对地攻击的能力大小取决于无人机的单机作战效能和自主智能,而有人机的作用主要为飞机编队提供指挥控制作用。
4 结论
(1)有人机/无人机混合编队协同对地攻击效能评估的综合指数模型较好地处理了有人机/无人机协同作战各子系统、分系统能力之间的关系,经计算验证,模型合理、可行,符合协同作战的规律和数学原理。
(2)有人机/无人机协同对地作战效能评估的综合指数模型基于典型作战模式,提供了合理的构建混合编队对地作战效能评估的思想和模型。在实际使用中应用该建模思想,综合考虑作战模式或想定以及具体可获得的各项数据情况,并结合参数敏感性分析以及课题任务等因素合理调整计算参数和权值,得到具体的计算模型。
(3)文中给出的有人机/无人机协同对地作战效能评估算例仅用于计算模型的验证,结果仅供参考。具体使用时可以根据研究目的不同选择机型的集合,从不同角度运用该指数模型。
[1]龙涛.多无人机协同任务控制中分布式任务分配与任务协调技术研究[D].长沙:国防科学技术大学,2006.
[2]Thomas J.Cooperative Engagement:Concept for a near team Air-To-Air Unmanned Combat Aircraft system[R].Browning Lt Col,USAF,2006.
[3]Wg Cdr J M,Paige GBR AF.UAVs Are Set to Mature[J]. JAPCC Journal,2006(3):28-30.
[4]祝小平,周洲.作战无人机的发展与展望[J].飞行力学,2005,23(2):1-4.
[5]闫晔.有人机/无人机协同中的交互控制技术研究[D].长沙:国防科学技术大学,2007.
[6]Cambone S,Kriegr P P.Unmanned Aircraft System Roadmap 2005-2030[R].Office of the secretary of defense,Washington DC,Oct 2005.
[7]Wilson J R.Unmanned Aerial Vehicles Get Ready for Prime Time[M].Military&Aerospace Electronics,2009.
[8]Thomas J.Cooperative Engagement:Concept for a Near Team Air-To-Air Unmanned Combat Aircraft System[R].Browning Lt Col,USAF 2006.
[9]Wg Cdr J M,Paige GBR AF.UAVs are Set to Mature[J]. JAPCC Journal,2006(3):156-159.
[10]董彦非,王礼沅,张恒喜.战斗机空战效能评估的综合指数模型[J].航空学报,2006,27(6):1084-1087.
[11]董彦非,王礼沅,张恒喜.空-地攻击作战效能评估的综合指数模型[J].航空学报,2007,28(6):1374-1377.
[12]董彦非,胡涛.战斗机综合作战效能评估建模方法[J].火力与指挥控制,2012,37(2):9-11.
[13]董彦非,王礼沅,王卓健.基于空战模式和AHP法的空战效能评估模型[J].系统工程与电子技术,2006,28(6):885-888.
[14]朱宝鎏,朱荣昌,熊笑非.作战飞机效能评估[M].第2版.北京:航空工业出版社,2006.
Synthesized Index Model for Cooperation of Manned/Unmanned Fighters in Air-to-Ground Attacking Effectiveness Assessment
DONG Yan-fei,ZHANG Wang,CUI Wei
(Nanchang Hangkong University,Nanchang 330063,China)
The typical air-to-ground attacking mode for future cooperation of manned/unmanned fighters is analyzed firstly.Then,combined with the characteristics analysis of the operation,a new modeling concept is submitted,and the method for synthesized combat effectiveness assessment is presented,and the sub effectiveness assessment models are perfected synchronously.Finally,the usability is verified through calculation example.
cooperation of manned/unmanned fighters,synthesized Index model,effectiveness assessment,cost-effectiveness analysis
V271.4,E926
A
1002-0640(2015)02-0058-05
2014-01-04
2014-02-05
航空科学基金(2011ZA56001);江西省研究生创新专项基金资助项目(YC2013-S204)
董彦非(1970-),男,河南开封人,副教授,博士后。研究方向:航空武器系统仿真与效能评估。
猜你喜欢
新疆钢铁(2021年1期)2021-10-14
军民两用技术与产品(2021年4期)2021-07-28
小哥白尼(军事科学)(2021年1期)2021-07-16
科学与财富(2021年36期)2021-05-10
小哥白尼(军事科学)(2020年12期)2021-01-18
航天工业管理(2019年11期)2019-04-20
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2017年10期)2017-04-20
北京航空航天大学学报(2017年10期)2017-04-20
军事运筹与系统工程(2016年4期)2016-07-10
