
一种多目标跟踪滤波方法研究
2015-02-22 03:14熊毅
雷达与对抗 2015年4期
熊 毅
(中国电子科技集团公司第三十八研究所,合肥 230088)
一种多目标跟踪滤波方法研究
熊毅
(中国电子科技集团公司第三十八研究所,合肥 230088)
摘要:针对雷达在实际探测过程中出现的发现概率低、点迹方位抖动、目标机动等现象,通过对传统滤波方法的自适应调整,提出了一种基于目标运动特性的自适应滤波方法。该方法以α-β滤波为基础,通过对目标运动特性分析,自适应调整滤波参数,解决了复杂环境下的目标跟踪不连续、跟踪偏离航道、航迹不平滑等问题,在一定程度上提高了雷达对目标的探测性能。实践表明,该方法能够满足性能指标要求,改善雷达画面目标跟踪效果,在工程实践上具有一定的实用价值。
关键词:雷达;多目标跟踪; 复杂环境;滤波
0引言
随着现代防空预警雷达技术的发展,利用多目标跟踪技术能够实现多个目标的探测与跟踪。然而对于雷达数据处理[1]来说,雷达前端送出的信号点迹和二次雷达点迹质量往往影响着航迹关联与航迹滤波预测的效果。在雷达实际探测目标的过程中,由于地形遮蔽、信号干扰、信号检测门限以及二次雷达性能等原因容易造成目标发现概率低、点迹方位抖动,再加上目标机动[2]等因素,极易产生航迹不连续、航迹不平滑、机动目标跟踪不上等现象,影响到雷达画面多目标跟踪的效果。因此,为了提高对多目标航迹跟踪的质量,改进雷达实际工作中的画面跟踪效果,本文设计了一种基于目标运动特性的自适应α-β滤波方法,并通过在实际工程上的应用表明了该方法的有效性。
1α-β滤波算法
在雷达数据处理工程应用中,由于α-β滤波器[3]计算量小,算法模型和滤波增益计算较为简单、实时性强,故被广泛地应用于各种滤波器的设计中。α-β滤波一般假设目标作匀速直线运动,即坐标位置x对时间t的二阶导数为0。在实际处理中一般把目标加速度作为高斯白噪声来处理,因此目标状态方程和观测方程分别假设如下:

(1)

(2)

(3)

(4)
(5)
α-β滤波器把加速度作为高斯白噪声,不考虑加速度的影响,简化了状态与量测方程,在目标做直线运动时可以使滤波后的置位与速度均方差达到最小。文献[4]中已经证明了α和β的最优关系为
(6)
从上述滤波模型不难看出,α-β滤波算法是在预先给定α和β数值的情况下进行的滤波与估计。当目标噪声统计特性不满足假设要求或是目标机动时,目标状态估计与实际状态之间往往存在较大差别,影响目标跟踪的稳定性。为了使α-β滤波算法具有良好的稳态噪声滤波能力和机动瞬态响应能力,本文设计了一种基于目标运动特性的自适应调整滤波模型参数的滤波方法。
2本文自适应滤波方法
由α-β滤波模型可以看出,只要确定了α,根据公式(6) 也可以把β确定下来。这里可以根据目标运定特性只考虑模型中对参数α的自适应调整,而参数α只涉及到对目标位置的滤波与估计,这里只考虑目标坐标位置的滤波与预测。设目标坐标位置滤波方程为

(7)

(8)

(9)

(10)
图1是目标在直线运动过程中的运动特征变量示意图,目标在k-1时刻由A点沿直线飞行至k时刻的B点,B点是目标在k时刻的预测位置,C点是由于信号观测噪声或机动等原因造成偏离航道的观测位置。图中线段BC的长度为D1(k),线段CE的长度为D2(k)。从图1不难看出,采用α-β滤波算法得到的目标滤波位置应该在B点与C点之间。如果目标处于直线运动状态下,航迹质量比较高,这时应尽量减小观测点C对滤波位置的干扰因素,使滤波位置接近于B点;如果此时目标处于机动状态,为了尽量保持航迹的平滑效果和避免航迹丢点,滤波点迹应该逐步收敛到观测点,滤波点迹一般在在三帧之内收敛于观测点迹。
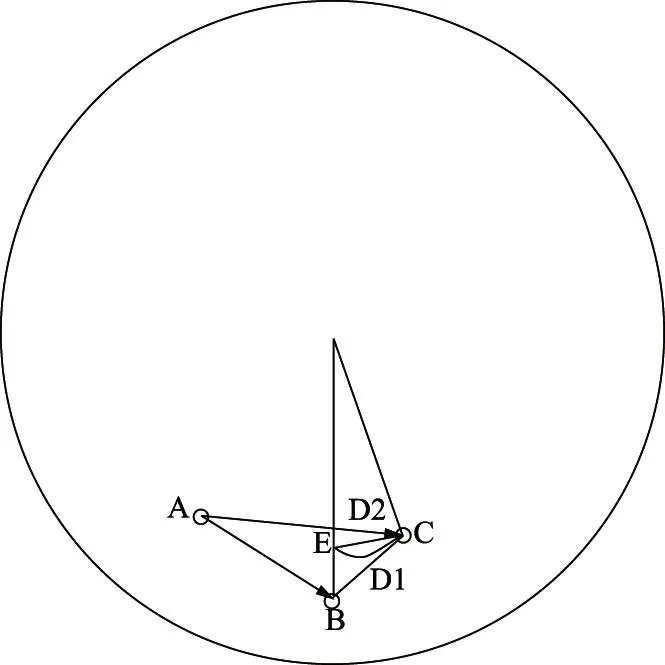
图1 目标沿直线运动的运动特征变量示意图

(1) 对每一个自动起始或波门起始的航迹,初始化航迹参数q(0)和α(0);
(2) 当点航迹相关成功且能够确定目标航向时,计算观测点迹与预测点迹的距离残差D1(k)和切向距离间隔D2(k);

(4) 计算滤波增益α(k),令αmin和αmax分别表示最小最大滤波增益,且0<αmin<αmax<1,如果目标不丢点,则α(k)=αmin+[D1(k)-r0]/[r1-r0]·(αmax-αmin),否则根据航迹质量q(k-1)计算滤波增益α(k)=λ1α(k-1)+λ2αmax,其中λ1、λ2由q(k-1)与q3、q2和q1大小关系确定,且λ1+λ2=1,可根据实际情况进行调整;
(5) 如果目标不丢点,根据D1(k)与大、小波门预置偏差r1、r0的关系、q(k-1)以及目标径向飞行时的帧间距离变化率△r=|[yr(k)-yr(k-1)]-[yr(k-1)-yr(k-2)]|计算航迹质量q(k),否则根据丢点数、q(k-1)与q3、q2的关系计算q(k);
(6) 根据滤波方程(7)和(8)计算目标滤波后的坐标位置,当前滤波计算输出后,跳转至(2)转入下一帧k=k+1时刻的滤波计算,直到目标衰落。
在本文设计的基于目标运动特性的自适应目标滤波方法中,为了保证受扰动的目标方位观测在滤波计算后,既能保持滤波的平滑性又能兼顾滤波的快速收敛,避免航迹跟踪偏离航道。在算法设计中限制了帧间连续观测修正次数i≤3,每一次观测修正系数δi1、δi2应根据上一次滤波收敛情况作动态调整。当算法中完成对目标的观测修正后,应该转换到直角坐标系下进行相应的滤波计算,以保证该自适应滤波算法的线性有效性。另外,对于反映目标运动特性的两个重要的统计变量q(k)和切向距离间隔D2(k),它反映了目标在相当长一段时间内的目标运动平稳性。这里有两点需要说明:第一,如果目标航迹质量q(k-1)>q3且目标非机动时,如果q(k)、q(k+1)计算结果是逐步减小的,需要保证q(k)>q(k+1)>q2,这是因为在目标处于长时间平稳跟踪状态下,目标出现两帧以内的方位抖动或丢点时应该保持航迹质量的稳定,有利于航迹滤波的平滑性;第二,如果观测修正后切向距离间隔D2(k)>r0,且变化范围比较小时则表明模型在自适应非平稳噪声等因素造成的观测扰动,如果D2(k) 3实验结果 雷达数据处理的一个难点在于复杂环境下由于各种未知因素造成的方位 “抖动”、目标丢点,加上目标机动等因素,容易造成跟踪滤波器很难趋于平稳,造成航迹质量的下降和滤波增益的增加,从而影响跟踪滤波器的收敛性,不能形成较为平滑的航迹,甚至会造成跟踪发散跟丢目标的现象。本文所采用的基于目标运动特性的自适应滤波方法,通过对滤波增益和目标方位观测的自适应调整,减小了目标观测方位的“抖动”,在一定程度上能加快跟踪滤波器的收敛,使目标航迹更为平滑。 图2是雷达实际工作过程中目标方位连续偏离的跟踪滤波效果对比图示例,图2(a)是α-β滤波算法的跟踪效果,图2(b)是基于运动特性的自适应滤波跟踪效果。从该图不难看出,基于运动特性的自适应滤波方法能够在目标出现方位量测偏离时逐步逼近目标观测位置,不会产生图2(a)中那样的“断层”缺口,使滤波后的航迹更加平滑。图3是采用自适应滤波算法后的目标跟踪滤波效果。从图3(a)和(b)可以看出,采用本文的自适应滤波算法后,目标航迹不会因为丢点或目标机动而快速收敛于观测点,有效避免了航迹跳点现象,提高了目标航迹跟踪的平滑性和稳定性。图3(c)是目标在几乎只有二次雷达点迹且二次点迹连续偏离航道情况下的滤波效果。从该图可以看出,在滤波过程中根据目标运动特性自适应计算滤波增益和修正量测,能够保证滤波位置不受二次雷达点迹方位偏离的影响而稳定跟踪目标。 (a) 采用α-β滤波算法跟踪效果 (b) 本文自适应滤波跟踪效果 4结束语 在雷达实际工作中,信号处理送出的目标点迹容易受到地物遮蔽、信号干扰、目标机动以及性能下降等因素的影响,造成目标丢点或是观测点迹在一定范围内的位置扰动,从而影响航迹滤波算法的收敛速度和平滑效果,对目标稳定跟踪造成了很大困难。本文提出的基于目标运动特性的自适应滤波算法有效地解决了α-β滤波算法滤波增益必须提前设定的常增益问题,能够根据目标在一定时间内的稳定性和当前目标观测结果自适应调整该滤波模型的各变量参数,保证了目标在受到非平稳噪声、目标机动、目标丢点以及二次雷达性能下降时的滤波器收敛性,提高了航迹平滑效果,改善了雷达画面跟踪质量,在工程应用中具备一定的实用性。 参考文献: [1]吴顺君,梅晓春.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2008:448-470. [2]周宏仁,敬忠良,王培德.机动目标跟踪[M].北京:国防工业出版社,1991. [3]王晓伟,金宏斌,杨龙波,等.基于α-β和δ-ε滤波器的机动目标跟踪[J].现代雷达,2006,28(7):56 -58. [4]KALATAPR.TheTrackingIndex:AGeneralizedParameterforα-βandforα-β-γTargetTrackers[J].IEEETransonAES,1984,20(2):174 -182. A multi-target tracking filter method XIONG Yi (No.38 Research Institute of CETC, Hefei 230088) Abstract:An adaptive filter method is presented based on the target motion features through the adaptive adjustment of conventional filter methods, due to such phenomena as the low detection probability, jittered azimuth and maneuvering targets in the process of radar detection. Based on the filter algorithm, with the analysis of the target motion features and the adaptive adjustment of the filter parameters, some problems are solved including discontinuous target tracking, course deviation and unsmooth track in the complex environment, improving radar detection capability to some extent. It is indicated that the method can satisfy the requirements of the performance index and improve the target tracking effect displayed on the radar console, which has some practical value in engineering application. Keywords:radar; multi-target tracking; complex environment; filter 中图分类号:TN958 文献标识码:A 文章编号:1009-0401(2015)04-0025-04 作者简介:熊毅(1981-),男,高级工程师,硕士,研究方向:软件系统设计、雷达数据处理算法研究及软件开发。 收稿日期:2015-04-14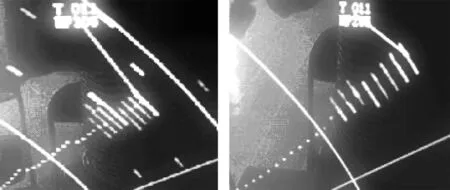

猜你喜欢
电子制作(2019年15期)2019-08-27
航天电子对抗(2019年4期)2019-06-02
小学生学习指导(低年级)(2018年12期)2018-12-29
电子制作(2018年16期)2018-09-26
电子制作(2018年11期)2018-08-04
火控雷达技术(2016年3期)2016-02-06
火控雷达技术(2016年3期)2016-02-06
火控雷达技术(2016年2期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
空间控制技术与应用(2015年3期)2015-06-05
