
VTS导航雷达中抑制远距离随机误差的高精度静态目标跟踪方法
2015-02-22 03:04崔威威
雷达与对抗 2015年4期
赵 航,姚 远,崔威威,丁 春
(1.海军驻南京地区雷达系统军事代表室,南京 210003;2.中国船舶重工集团公司第七二四研究所,南京211153)
VTS导航雷达中抑制远距离随机误差的高精度静态目标跟踪方法
赵航1,姚远2,崔威威2,丁春2
(1.海军驻南京地区雷达系统军事代表室,南京 210003;2.中国船舶重工集团公司第七二四研究所,南京211153)
摘要:在VTS系统的应用中需要对锚区内停泊的目标进行监管。在港口或码头的水域内,锚区通常位于监管区域的远端,雷达方位上的随机误差在传递到直角坐标时会使目标点迹在雷达站的切向方位上呈现摇摆的特点,并且锚区内的目标通常比较密集,所以VTS系统内的导航雷达在跟踪远区内的静态目标时会面临较大的困难。本文利用点迹杂波图生成雷达监管区域内的静态目标态势,然后将静态目标态势和目标航迹分布进行关联,并利用静态目标态势的位置信息对目标关联数据进行修正,以提高对远距离静态目标的跟踪精度。
关键词:VTS;点迹杂波图;静态目标
0引言
锚区是在VTS系统监管水域中根据水深、地质、避风等条件选定的、专供船只抛锚停泊及船队编组的地点。为了实时了解锚区内锚位上目标停靠的状态,VTS系统需要对该类停靠的目标进行监控。由于目标在停靠状态下船上的AIS信息上报的数据率较低或者AIS设备处于关闭状态,无法及时反映目标的运动状态,所以对于该类目标,VTS系统无法利用AIS信息来管理目标,只能依靠雷达跟踪来实现对于目标的实时监管。锚区一般位于VTS系统监管水域的远端。雷达方位上的随机误差在传递到直角坐标时会使目标点迹在雷达站的切向方位上呈现摇摆的特点,并且锚区内的目标通常相对比较密集,所以VTS系统内的导航雷达在跟踪远区内的静态目标时会面临较大的困难。
本文利用点迹杂波图生成雷达监管区域内的静态目标态势,然后将静态目标态势和目标航迹分布进行关联[1],并利用静态目标态势的位置信息对目标关联数据进行修正,以提高对远距离静态目标的跟踪精度。
1态势和目标分布关联技术
利用点迹杂波图的结果对雷达监控区域内的目标点迹进行静态筛选,挑选出每个扫描周期内属于静态目标的点迹,生成静态目标的分布态势,然后将雷达监控区域内的目标航迹数据与静态目标的分布态势作相关处理,生成航迹与态势的对应关系。态势和目标分布关联技术的实现途径如下:
(1) 点迹杂波图生成静态目标分布态势
点迹杂波图的基本理论为把在两次或两次以上相继扫描中的点迹位移与已登记的杂波图点的第一次位置(已测得)为中心的波门相比较。对杂波点或缓慢移动的目标来说,多次扫描中相继进入的回波会保留在波门中,但对于快速目标来说只有少数几次扫描回波仍保留在波门中。点迹杂波图可以给出雷达覆盖范围内固定杂波的位置信息。
把点迹杂波图筛选出来的每一个雷达周期的静态目标点迹建立成为一个目标集合:
其中nA为点迹杂波图筛选出来的静态目标个数。
对于筛选出来的静态目标的相对拓扑信息,当前选中的目标与其他目标之问的相对距离及与其他各目标连线相对于正北方向的夹角不会受到随机误差的影响,因而可以根据这些目标之间的拓扑信息量定义该目标相对拓扑向量[2]。
以当前选中的目标为坐标系的原点建立极坐标系,沿顺时针方向划分为M个象限,其他目标按照相对当前选中的目标的位置关系落入各象限内。将落入每一象限内的各目标与当前选中的目标间的欧氏距离分别求和,作为该象限的相对拓扑分量。
假设某一时刻,筛选出来的6个静态目标分布如图1所示,极坐标系以目标3为原点,沿顺时针方向划分为8个象限,则以目标3为极坐标系原点所建立的拓扑向量定义为
其中,拓扑向量的维数与极坐标划分的象限个数一致,ρ表示目标之间的欧氏距离。
将筛选出来的静态目标依次计算各自的拓扑向量,则静态目标与各自的拓扑向量集合组成了静态目标分布态势。
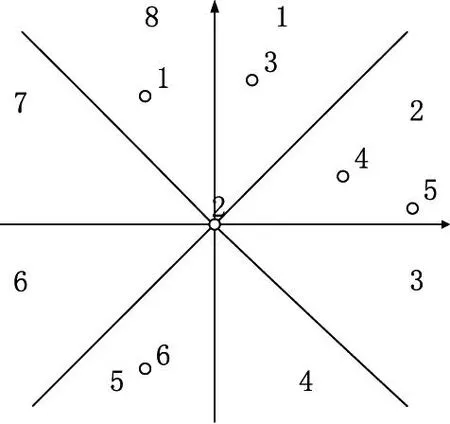
图1 拓扑向量生成示意图
(2) 航迹数据生成目标分布
航迹数据生成的目标分布与点迹杂波图生成静态目标分布态势的过程类似。为了减少计算量和降低相关处理的计算复杂度,先根据航迹数据中的速度信息完成航迹数据的筛选,把慢速(2~3 kn以下)目标筛选出来用于生成目标分布。
将筛选出来的慢速目标依次计算各自的拓扑向量,则筛选出来的慢速目标与各自的拓扑向量集合生成了航迹数据的目标分布。
(3) 航迹与态势的相关处理
对k时刻点迹杂波图筛选出来的m个静态目标和航迹数据筛选出来的n个慢速目标可以构建以下的模糊关联矩阵。
其中fij(k)表示第i个静态目标与第j个慢速目标的拓扑向量之间的相关系数大小。航迹与态势的相关判别采用双门限准则[3],选取正整数I和R,k=1,2,…,R。若目标i,j关联成功,则设定mij(k)=mij(k-1)+1,mij(0)=0,且Dij′(k)=Dij′(k-1)+1,j′≠j,Di,j(k)=Di′,j(k-1)+1,i′,≠i。否则置F(k)中所有元素对应的Dij(k)=Dij(k-1)+1。其中,mij(k)和Dij(k)分别定义为航迹对准关联和脱离质量。在每次计算fij(k)之前,需要判断若Dij(k-1)>R-I,则fij(k)=0。若在R次对准关联检验后,有mij(R)≥I,则认为航迹i与j形成固定关联,并停止对它们进行后续的关联检验,认定第i个静态目标与第j个慢速目标相关。

2静态目标高精度跟踪技术
在完成了点迹杂波图筛选出来的m个静态目标和航迹数据筛选出来的n个慢速目标的相关处理之后,根据相关的结果可以获取慢速航迹与静态目标的一一对应关系。由于点迹杂波图在维护过程中采用的是一种类似于扫描周期间反馈的方式,可以有效抑制由于随机误差带来的点迹摇摆特性。当慢速目标与点迹杂波图筛选出的静态目标产生对应关系后,将慢速目标在每个雷达扫描周期内的有效关联点迹由点迹杂波图作过扫描周期间反馈后的点迹替代。
周期间反馈式积累的公式为

对成功相关的静态或者慢速目标凝聚的雷达点迹作周期间反馈式积累,可以有效地改善由于随机误差所带来的影响,提高雷达凝聚点迹的位置精度。
当目标从锚区内的泊位上解缆起锚时,并当目标移出点迹杂波图维护的关联范围后,则该位置的点迹杂波图就无法继续更新。当慢速目标无法找到相应作过滑窗积累的点迹杂波图点迹时,就自动使用其自身关联到的雷达点迹。所以,以上提及的相应技术既能保证静态目标的稳定跟踪,又可以及时响应目标由静转动的运动状态变化。
3工程应用效果
在连云港VTS项目现场验收的测试中,选中距离雷达12km左右的浮标作为静态测试的目标。将DGPS放置在浮标上用来采集静态目标的真值。图2、图3所示为雷达点迹和雷达跟踪生成的航迹效果图,图中实心圆点表示雷达凝聚的目标点迹,空心圆圈表示雷达跟踪生成的航迹。
根据DGPS采集的真值计算采用稳定跟踪技术前后,静态目标跟踪精度,计算结果如表1所示。
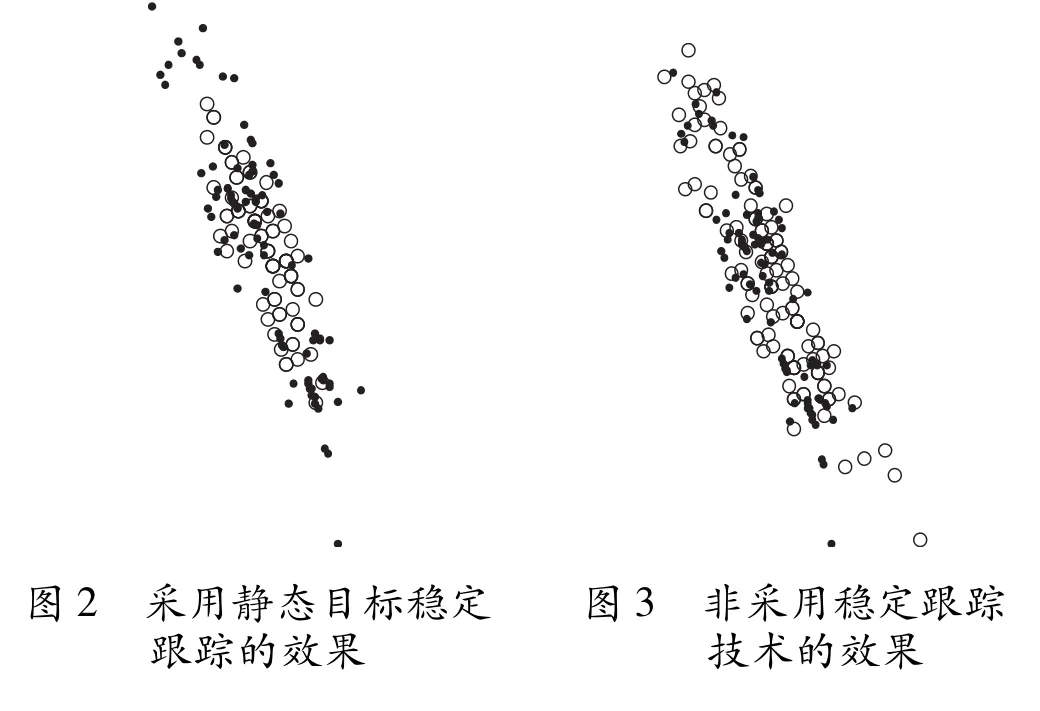
表1
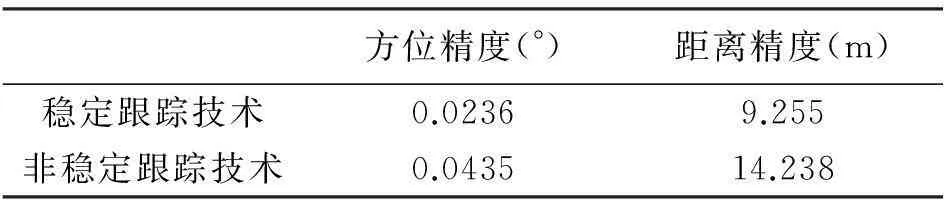
方位精度(°)距离精度(m)稳定跟踪技术0.02369.255非稳定跟踪技术0.043514.238
4结束语
为了解决雷达随机误差在远距离上对目标点迹在雷达站切向方位上带来的影响,本文利用点迹杂波图生成雷达监管区域内的静态目标态势,然后将静态目标态势和目标航迹分布进行关联,实现对远距离静态目标的高精度跟踪,并且附加说明了该技术在实现静态目标稳定跟踪的同时不会影响对目标由静态转为动态时的跟踪性能。文中提及相应技术已经成功地应用到了海事VTS的多个系统中,并通过了连云港、靖江VTS系统的现场验收。
参考文献:
[1]何友,王国宏,陆大金,等.多传感器信息融合及应用[M].北京:电子工业出版社,2007.
[2]杨哲,韩崇昭,李晨,等.基于目标之间拓扑信息的数据关联方法[J].系统仿真学报,2008,20(9).
[3]宋强,熊伟,马强.基于目标不变信息量的模糊航迹对准关联算法[J].系统工程和电子技术,2011(1).
A high-precision static target tracking method of suppressing
remote random errors for VTS navigation radar
ZHAO Hang1, YAO Yuan2, CUI Wei-wei2, DING Chun2
(1.Military Representative Office of Radar System of the PLA Navy in Nanjing, Nanjing 210003;
2. No.724 Research Institute of CSIC, Nanjing 211153)
Abstract:The targets berthed in the anchorage area are required to be supervised in the application of the VTS system. The anchorage area is usually located in the remote area of the supervision zone in the waters of the harbor or the dock. When the random errors in radar azimuth are sent to the rectangular coordinates, the plot swing shall occur in the tangential direction at the radar station. Usually, the targets in the anchorage area are very dense. Therefore, the navigation radar in the VTS system is faced with a difficult problem in tracking the static targets in the remote area. The static target situation in the supervision zone is generated by utilizing the plot clutter map, and then the static target situation and the target track distribution are correlated. Moreover, the correlated target data are corrected according to the location information of the static target situation to improve the tracking precision of the static targets.
Keywords:VTS; plot clutter map; static target
中图分类号:TN957.51
文献标志码:A
文章编号:1009-0401(2015)04-0015-03
作者简介:赵航(1989-),男,助理工程师,研究方向:雷达工程;姚远(1986-),男,工程师,硕士,研究方向:雷达数据处理;崔威威(1987-),男,工程师,硕士,研究方向:雷达数据处理;丁春(1983-),男,高级工程师,硕士,研究方向:雷达数据处理。
收稿日期:2015-05-30;修回日期:2015-06-10
