
智能控制算法在打桩机系统中的应用
2015-02-21 06:49:02刘玮倩周振东陈忠孝
电子设计工程 2015年18期
秦 刚,刘玮倩,刘 千,周振东,陈忠孝
(1.西安工业大学 电子信息工程学院,陕西 西安 710021;2.海军驻西安地区军事代表局 西安市70号信箱402分箱海军代表,陕西 西安710056)
智能控制算法在打桩机系统中的应用
秦 刚1,刘玮倩1,刘 千2,周振东1,陈忠孝1
(1.西安工业大学 电子信息工程学院,陕西 西安 710021;2.海军驻西安地区军事代表局 西安市70号信箱402分箱海军代表,陕西 西安710056)
打桩机系统工作过程中会遇到各种各样的复杂地形,为了提高自动冲孔打桩机对复杂地形的打桩能力和适应性,文中从打桩机起锤信号的处理、余绳最优控制算法及专家控制系统等方面来进行研究。采用FFT变换算法,将采集到的时域信号变换成频域信号进行分析处理,消除了杂波信号的干扰,提高了系统对起锤信号检测的稳定性。采用模糊自适应控制算法来对余绳进行研究,使冲孔打桩机控制设备根据不同的目标土层对余绳的长度进行适应性调整。采用专家控制系统,以提高冲孔打桩机对复杂地质环境的适应能力。最终通过Matlab仿真及反复实验,分析得出,文中算法和控制策略对复杂地形有很好的处理能力。
自动打桩机;专家控制系统;余绳最优控制算法;FFT;Matlab
目前,冲孔打桩机多由人工手动机械式操纵完成,当遇到复杂环境时(斜岩),需要采用添加石子和泥沙混合物直到出现水平打桩面,反复以上步骤,才能继续作业。同时对施工人员有极高的要求,且劳动强度大,安全系数低,施工质量难以保证。所以本文通过采用专家控制系统、余绳最优控制算法、FFT变换算法等,提高打桩机系统的高效性和适应性。
1 专家控制系统
专家控制系统最核心的部分是专家控制器,其包含有专家知识库、知识获取、知识推理和知识表达规则集这4个模块。专家控制系统结构框图如图1所示。
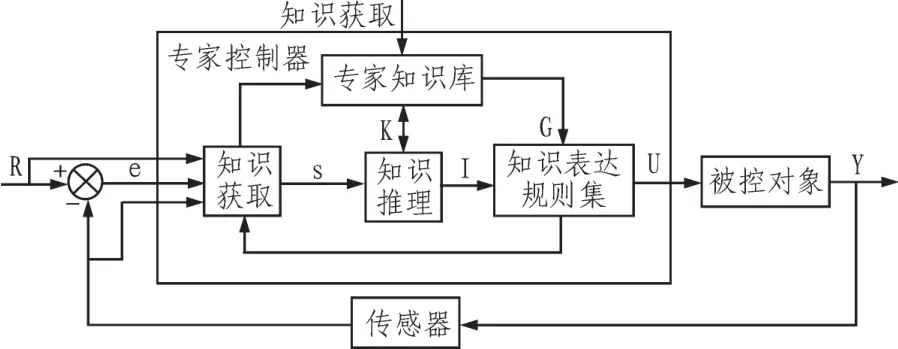
图1 专家控制系统结构框图Fig.1 Expert control system structure diagram
专家控制系统的控制过程如下:专家知识库里涵盖了复杂环境信息、余绳长度信息和泥浆浓度信息等。系统通过反馈信息获得当前地质环境的知识,依据知识库中的知识进行知识推理,与知识库中的信息进行扫描和对比,再根据控制规则表对余绳长短进行自适应调整,然后通过知识表达规则集输出到执行机构上。同时,又可以向用户进行解释推理,并且将当前事实记录添加到余绳控制规则表中,通过人机接口来完成知识库的维护和更新。
专家控制器最核心的部分是知识库。专家知识库主要由事实数据库、经验数据库和知识规则库组成。其中最底层的事实数据库主要存放被控对象或被控过程的静态知识和动态知识,本文事实数据库存放的是建筑工程中打桩机领域的专业基础知识,例如打桩的地质环境,气候条件等;中间一层的经验数据库用来存放基于事实数据库中知识的专家经验,本文经验数据库存储的是在打桩机领域的一些专家经验;最高层的知识规则库是数据库中知识的表达方式,知识规则的产生有多种方式,本系统采用产生式的方法来建立相应的知识规则库,这种规则的表示方式更加便于专家数据库的内容得到实时更新。
知识推理是指依据专家知识库中的规则从事实知识库推理出结论的过程。知识推理的方法一般有3种,即正向推理、逆向推理和混合推理。由于本系统设计的专家控制系统中,专家知识库内容比较少,所建立的规则也不多,知识推理就比较简单,故多采用正向推理方法进行知识推理。如图2所示为专家控制系统推理机的推理流程图。
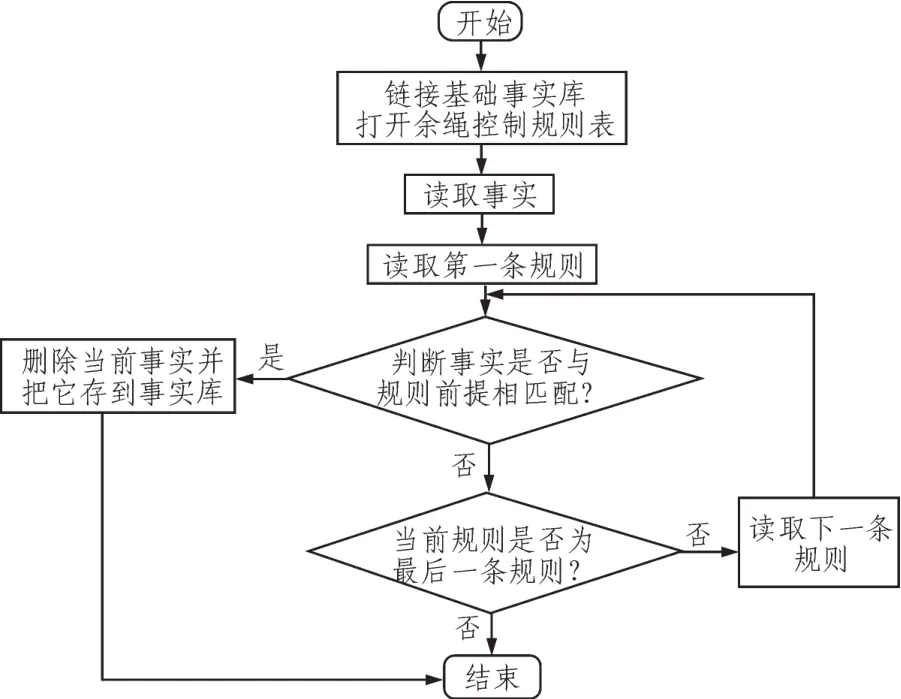
图2 专家控制系统推理流程图Fig.2 Expert control system inference flow chart
在知识推理过程中可以利用数学模型来表达,表达式为:

专家控制器根据专家知识K对输入信息E进行知识推理,然后根据推理结果I输出相应的控制结果U。
2 余绳模糊控制算法
在打桩过程中,桩锤通过自由落体所产生的重力带动绕线器加速转动,如果不能及时对绕线器进行点刹,钢丝绳就会继续下落,再加之后的离合时间,就会造成余绳长度过长,降低了打桩机的工作效率,还易于产生吸锤、卡锤等故障;而如果点刹太早,会使余绳太紧,将导致桩锤未能到达桩底或刚好到达桩底,不仅会使打桩失效,还会因突然刹车产生的外力绷断钢丝绳,同样存在安全隐患。因此,对于余绳的控制至关重要。
对余绳进行精确控制的关键是模糊控制算法的运用。由于冲孔打桩机余绳的控制没有精确的数学模型,不确定因素众多,非线性特性明显,同时还存在多参数变化和外界干扰多等控制难点,所以采用带“不同等级修正因子的自适应模糊控制器”进行实时控制。该控制器实际上是一种对误差和误差变化率的加权控制方案,通过给修正因子取不同的值,实现输入和输出误差值的修正,以便适应被控对象的不同要求。这样模糊控制器具有一定的通用性和适应性,从而使得打桩机的余绳控制能够适应多种复杂地形。最常用加权关系采用式是U= AE+(1-A)C,式中E为误差,C为误差变化率,A是加权系数。改变A的大小可以实现对输入和输出误差及误差变化率的不同加权。A的取值大小有两个基本准则:1、对于响应速度慢的系统,误差加权值应较小;2、当被控对象阶次数较低时,误差加权值应大于误差变化率的加权值。但上述带有一个修正因子的加权关系无法满足打桩机余绳控制的要求,因此提出不同修正因子针对不同误差等级的方法,E小时用A1,E中等时用A2,E大时用A3。

其中,A1,A2,A3∈(0,1)。A1,A2,A3为不同值时可以有不同的控制决策表。同时还可以根据实际打桩环境的需要将余绳控制的等级分的更多更细,可使控制规则和方法变得更加灵活,满足不同状态下的打桩作业和工程实施。
文中通过参照《冲孔灌注桩施工工艺》中的相关内容,按照不同地质环境的施工要求,制定表格如表1所示。
3 FFT算法
冲孔打桩机的工作环境非常复杂,对主控电路板而言,会受到外界各种干扰信号的影响,尤其是对起锤信号的干扰,而起锤信号的检测又是整个冲孔打桩机系统正常稳定工作的关键环节。因此,对起锤信号进行处理至关重要。本文将起锤信号进行FFT变换处理,对信号进行频域分析。首先在采集的起锤信号波形中取长度为N的时域序列X(n),X(k)为起锤信号的频域序列,取旋转因子为,将时域序列X(n)按n的奇偶性分为两组,即n=2r及n=2r+1两组,可得以下公式,如4式所示:

表1 余绳控制规则表Tab.1 The control rule table of rest rope

通过(4)可知偶数点样本计算G(k),奇数点样本计算H(k)。由基2时间抽取时间算法将时域周期进行第一次二分,可以得到,故得公式(5):

通过以上公式可以发现,将时域不断进行分解,按时间抽取算法可知在尽量小的序列上进行离散傅里叶变换,得到频域序列X(k)。
经过反复试验,得出利用FFT变换算法对起锤信号进行处理,使得起锤信号波动幅度减小,输出波形毛刺降低,同时还提高了起锤信号的采集速率,节省了微控制器的运算时间,提高了打桩机的工作效率,保证了冲孔打桩机的高效稳定运行。
4 Matlab仿真实验
为了验证起锤信号经过FFT变换后的明显变化,本文采用Matlab软件对所采集到的起锤信号数据进行仿真实验。首先,通过Codewarrior调试软件对起锤信号进行数据采集,截取500个时域数据后,在Matlab软件中对这500个数据进行FFT变换仿真,并得到相应的波形图。
通过Matlab仿真后的波形图如图3所示。

图3 FFT仿真结果图Fig.3 The FFT simulation results
通过对仿真结果进行分析容易得出,时域信号经过FFT变换成频域信号后,消除了毛刺,有效地防止杂波信号的干扰。因此,对起锤信号进行频域分析,明显提高了冲孔打桩机的稳定性和可靠性。
5 结束语
在原有的自动冲孔打桩机的基础上,通过引进FFT变换算法对起锤信号进行处理,将时域信号变换成频域信号,进行频域分析。采用模糊自适应控制算法来对余绳进行分析处理,使打桩机根据不同的目标土层对余绳长度进行适应型调整。采用专家控制系统,根据地质类别、余绳长度、冲程距离、泥浆比重等指标,构建专家知识库进行数学建模,使设备能够根据不同地质环境推理出相应的控制策略,从而增加冲孔打桩机控制设备对复杂地形环境的适应能力。本文的研究有效提高了冲孔打桩机的工作效率,增强了打桩机对环境的适应性,降低了施工人员的劳动强度,在很大程度上节约了成本,满足了人们对建筑施工质量越来越高的要求。例如,国家高速公路-G75兰海高速公路的武罐高速施工段第十四标段广泛应用了本文设计的冲孔打桩机,并且在G7011十天高速公路段旬阳、略阳、洋县、镇巴、天水等地也得到了非常广泛的应用,得到了施工人员的好评,冲孔打桩机有着非常可观的市场前景。
[1]白晓军,赖涤泉.桩基工程中冲孔打桩机的应用及展望[J].石家庄铁道学院学报.2009(6):93-96.BAI Xiao-jun,LAI Di-quan.Application and prospect of the pile foundation engineering pile punching machine[J].Journal of Shijiazhuang Railway Institute,2009(6):93-96.
[2]邓长峰.多功能打桩机.中国,200610070513.5[P].2007-05-09.
[3]李廷,徐振华.锤击管桩沉桩过程模拟与算法[J].铁道科学与工程学报,2010(4):67-73.LI Ting,XU Zhen-hua.Simulation and algorithm process of Hammer pile[P].Journal of Railway Science and Engineering,2010(4):67-73.
[4]Zimmerman Joshua D,Williamson Christopher A,Pelosi Matteo,et al.Energy consumption of an LS excavator hydraulic[J].ASME Int Mech Eng Congress Expos Proc.2008,(4):117-126.
[5]沈传风,黄洪全,等.基于嵌入式系统的火警控制器的网络研究[J].自动化与仪表,2006(5):8-11.SHEN Chuan-feng,HUANG Hong-quan,et al.Study of fire alarm system controller based on ARM [J].Automation and instrumentation,2006(5):8-11.
[6]谢永健,朱合华,王怀忠,等.打桩锤击模型的解析算法[J].岩石力学与工程学,2005(1):171-176.XIE Yong-jian,ZHU He-hua,WANG ZHong-huai,et al.The parsing algorithm model of pile hammer impact[J].Rock mechanics and Engineering,2005(1):171-176.
Application of intelligent control algorithm in the piling machine system
QIN Gang1,LIU Wei-qian1,LIU Qian2,ZHOU Zhen-dong1,CHEN Zhong-xiao1
(1.The Electronic Information Engineering College of Xi’an Technological University,Xi’an 710021,China;2.The Military Representative Office of Navy in Xiˊan Area,The Naval Representative of No.70 box 402 box,Xiˊan 710056,China)
The piling machine system working will encounter all sorts of complex terrains,in order to improve the piling capability and adaptability of automatic punching pile driver for complex terrain,the paper research for piling hammer starting signal processing,the optimal control algorithm of excess rope,expert control system and other aspects.Using FFT algorithm,collected time-domain signal is changed into frequency-domain signal to analysis and process,eliminating the interference of clutter signal and improving the stability of hammer signal detection for the system.Adopting fuzzy control algorithm to research for the excess rope,making punching hammers adjust the length of the excess rope depending on the target soil.Using specialistic controlling system to improve the adaptability of automatic punching pile driver to complex geological environment.Finally,through the Matlab simulation and experiments it can be seen that the algorithm and control strategy can manage effectively the complex geological environment.
automatic punching pile driver;Specialistic control system;Optimal control algorithm of excess rope;FFT;Matlab
TN9
:A
:1674-6236(2015)18-0093-03
2014-12-23稿件编号:201412216
陕西省科学技术研究发展计划项目(2014K05-44)
秦 刚(1968—),男,陕西西安人,教授。研究方向:电子工程、电子仪器与检测。
猜你喜欢
辽河(2024年1期)2024-03-04 06:54:23
建材发展导向(2022年18期)2022-09-22 07:13:10
辽宁师专学报(自然科学版)(2021年1期)2021-07-21 03:17:06
科学与财富(2019年35期)2019-10-21 07:03:07
制造技术与机床(2019年6期)2019-06-25 10:17:46
山东工业技术(2016年15期)2016-12-01 05:30:44
中国交通信息化(2016年9期)2016-06-06 07:42:23
图书馆研究(2015年5期)2015-12-07 04:05:48
河南科技(2015年19期)2015-08-14 09:24:14
水电站机电技术(2014年1期)2014-09-26 11:59:48
