
不同比例尺地图水系目标变化探测方法研究
2015-02-10 02:26王晓密,赵彬彬,2,邓敏*,彭东亮
地理与地理信息科学 2015年6期
王 晓 密,赵 彬 彬,2,邓 敏*,彭 东 亮
(1.中南大学地理信息系,湖南 长沙 410083;2.长沙理工大学交通运输工程学院,湖南 长沙 410004)
0 引言
现势性是衡量空间数据质量的一个重要指标。为保持空间数据的现势性,需对地理空间数据库进行持续更新[1,2]。在当前制图综合技术远未达到自动、智能化的情况下,对不同比例尺地图更新的一个有效方法是以现势性弱的较小比例尺地图为参考,基于现势性强的较大比例尺地图发现、探测变化信息并对较小比例尺地图进行级联更新,该方法具有效率高、成本低等优势,其中一个关键环节是探测不同现势性的不同比例尺地图间的变化信息。因此,本文以水系目标为例,研究不同现势性的不同比例尺地图变化信息探测方法。
在不同比例尺地图中,不同详细程度的同一水系目标其几何形状、表达维度等差异较大,如小比例尺地图中呈线状,大比例尺地图中呈面状,因而需分别对线状和面状水系目标进行变化分类并研究其探测方法。目前,已有不少空间目标变化分类与探测方法[3,4],例如:唐炉亮等区分了新增、删除、变化3种线状图形变化类型[5];吴建华等将面目标变化情况分为面积变化、移位、消失、综合和新增[6];Claramunt等针对时空动态数据,将地块数据变化类型分为8种[7];Zhou等综合考虑时间上的不相邻性,将变化类型归纳为出现、消失、属性变化、扩大、缩小、变形、移动、旋转和重现9种[8]。分析可知,目前方法主要集中在对相同尺度同一数据类别空间目标变化分类、探测的研究,对不同比例尺间不同数据类别共存的情况分析较少。然而,空间目标变化探测过程中,若忽略地图尺度的差异,则将导致变化类型判断错误,如图1a所示,面目标A2的面积因制图综合操作产生的表达差异被误判为真实变化;若忽略线状和面状目标的维度差异,亦将导致变化类型判断错误,如图1,较大比例尺地图面目标A5因制图综合操作“降维”后在较小比例尺地图无同名面目标,被误判为“消失”。
为此,本文顾及不同比例尺地图水系目标表达的几何和维度差异,将线状水系目标变化类型分为出现、消失、延伸、收缩4种,将面状水系目标变化类型归纳为出现、消失、收缩、扩张、移动、旋转、分裂、合并和先分裂后合并9种,该方法顾及线状、面状单目标及多目标变化类型,可推广应用于居民地、湖泊等面目标数据以及道路、河流等线、面目标或线面共存的情况,本文分别探讨不同比例尺地图水系目标的各种变化类型描述与探测方法。
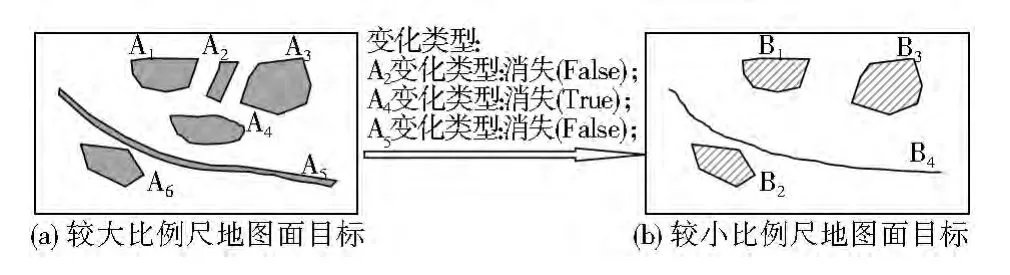
图1 忽略地图尺度和空间目标维度差异易导致的变化误判断Fig.1 Misjudging change types regardless of the scale and dimension
1 不同比例尺地图线状和面状水系目标变化描述与探测
对于表达同一地区而现势性不同的两个比例尺地图,现势性强的较大比例尺地图(记为ML)与现势性弱的较小比例尺地图(记为MS)中同名目标对应模式分为1∶0、0∶1、1∶1、1∶M、N∶1及N∶M6种[9]。受制图精度限制,空间目标在不同比例尺地图中存在表达差异,这6种模式综合反映了不同时期的地物真实变化和制图综合操作的作用(表1)。因而,在分析、获取不同比例尺地图空间目标变化信息时,须考虑制图综合的影响,即比例尺引起的地图表达差异。下文分别描述线状和面状水系目标的变化信息,进而探讨各种类型变化的探测方法。
1.1 线状水系目标变化描述与判别
在较大比例尺地图中,水系目标(如河流、沟渠)以条带状面目标表示,在中比例尺地图中水系目标常以面目标和线目标结合的方式表达,在较小比例尺地图中常以线目标表达[10]。为更准确地获取线状水系目标变化信息,对于同时涉及线状和面状水系目标的情形,则先对面状水系目标进行“中轴化”[11]。表2列出了线状水系目标的变化类型,具体判别流程如图2所示。
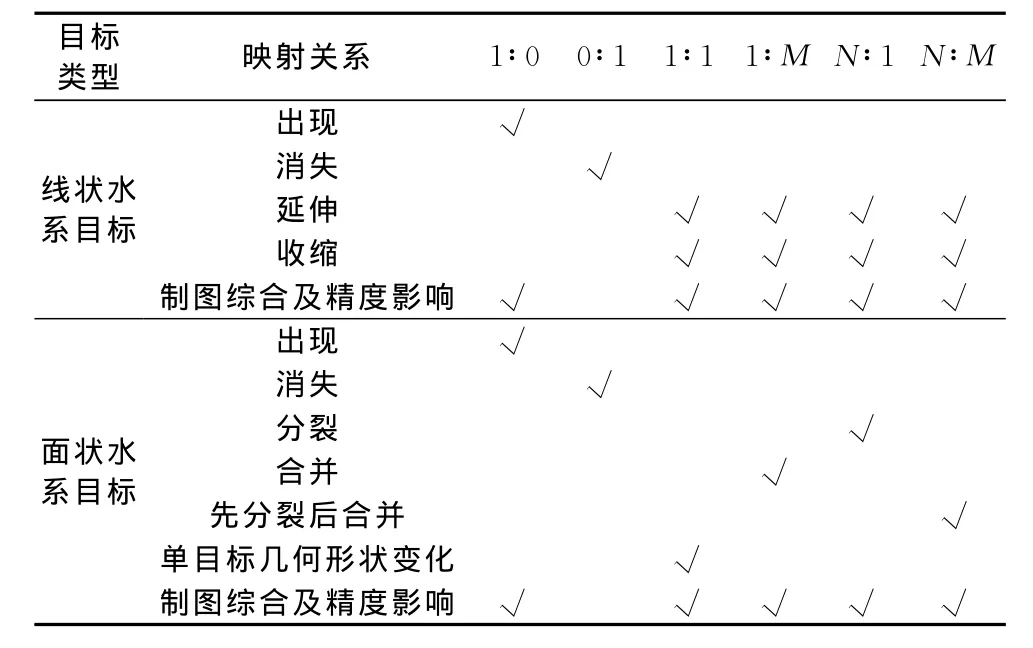
表1 水系同名目标对应模式与变化类型映射关系Table 1 Mapping of hydrographic objects′corresponding mode and change classification
(1)出现。“出现”是指较大比例尺地图 ML中的目标在较小比例尺地图MS中不存在。根据制图综合过程中“选取”操作原则,若较小比例尺地图MS上目标Be长度小于阈值δl则不被“选取”[12,13],当目标长度大于阈值δl时(如表2中B6),则判定为新出现的目标,判别规则为:
(2)消失。“消失”是指较小比例尺地图 MS中目标Af在较大比例尺地图ML中不存在。在表2中,较小比例尺地图MS中目标A10是因气候、降水量等原因而干涸的河流,在较大比例尺地图ML中不复存在,变化类型即为“消失”,判别规则为:
1.2 面状水系目标变化描述与判别
面状水系目标的变化类型主要包括出现、消失、收缩、扩张、移动、旋转、分裂、合并和先分裂后合并9种,变化类型判别流程如图3所示,下文分别对各种变化类型进行描述。
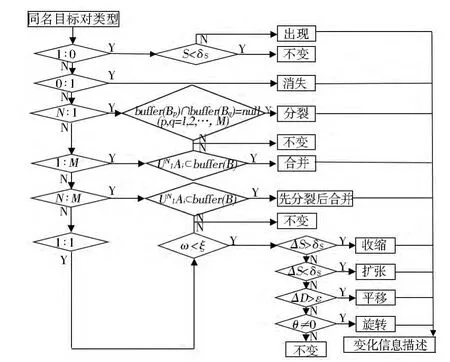
图3 面状目标变化类型判别的具体流程Fig.3 Flow chart of change type identification of areal hydrographic objects
(1)出现。“出现”是指较大比例尺地图 ML中目标在较小比例尺地图MS中不存在。随着地图比例尺的缩小,受图幅载荷量限制,大比例尺地图中某些目标因制图操作而被舍去,因此需区分真实出现及制图操作影响两种情况。通过对制图综合过程选取与删除目标时应考虑的因素分析可知[12],在制图概括时,将图上面积小于阈值δS的目标进行综合删除处理[12,13]。因此,当1∶0模式的目标Be面积超出阈值δS时(表2),则判定为新出现的目标,判别规则为:
(2)消失。“消失”是指地图 MS中的目标Af在地图ML中不存在。如表2中,A1为因干涸等原因而消失的目标,在较大比例尺地图ML中不复存在,变化类型即为“消失”,判别规则为:
(3)收缩。“收缩”是指地图 MS中的目标Af在地图ML中面积变小,考虑到同名目标的面积差异,当同名目标面积差异ω(Af,Be)在制图综合精度允许范围ξ(Af,Be)内或者变化面积值在地图最小面积阈值δS范围内时[14,15],认为是制图影响的结果,判别为无变化;反之认为发生了变化。其中,
参数ω(Af,Be)度量Af与Be的相交程度。相交程度越高,ω(Af,Be)值越小,即几何形状差异越大ω(Af,Be)值越大。ξ(Af,Be)表示制图精度εS导致的Af与Be几何形状差异值,其中Bε、B-ε表示Be向内和向外建立的大小为ε的缓冲区。当ω(Af,Be)小于ξ(Af,Be)时,判定目标无变化,反之认为发生了变化。如表2中A11向内“收缩”1 km2,收缩程度用变化前后面积差值度量,其变化前后几何形状差异超出制图精度允许范围且变化后面积缩小了,则认为发生了“收缩”变化,判别规则为:

(4)扩张。“扩张”是指地图 MS中的目标Af在地图ML中面积变大,当“扩张”变化前后目标几何形状差异ω(Af,Be)超出制图综合允许范围ξ(Af,Be),且扩张面积大于δS,则认为目标发生了“扩张”变化,如表2中MS中目标A0因蓄水量增加,其在ML中的同名目标B9面积增加,发生“扩张”变化,扩张程度用变化前后面积差值度量,判别规则为:

(5)移动。“移动”是指地图 MS中的目标Af在地图ML中位置发生变化,当目标位置变化前后几何形状差异ω(Af,Be)超出ξ(Af,Be),其平移距离大于制图精度ε,认为发生“移动”变化,目标移动变化量用距离和方向度量,距离用变化前后目标中心点间距度量,方向则采用4方向法计算。表2中,A7向北(N)移动了10 m,判别规则为:
其中,AC和BC分别为Af和Be的中心,dir(AC,BC)为“移动”前后中心连线的4方向框架描述。
(6)旋转。“旋转”是指目标Af绕其中心旋转角度θ,当目标旋转变化前后几何形状差异ω(Af,Be)超出ξ(Af,Be),认为发生“旋转”变化,包括旋转方向和角度值两个参数。旋转方向包括顺时针和逆时针,旋转角度即目标绕其中心转动的角度值,如表2,目标A4绕其中心逆时针旋转15°,在ML中的同名目标B4整体亦发生旋转,判别规则为:
其中,逆时针旋转时,θ取正值,反之,θ取负值。
2 实验及结果分析
以内地某市同一区域1∶2 000(面状目标713个,线状目标151个)和1∶10 000(面状目标220个,线状目标56个)的水系数据为实验对象(图4),根据表3中设 定 的 阈 值[13,14,17],并 按 上 述 的 变 化 探 测 与表达流程进行实验,证明变化探测结果准确(图5(见封2)、图6),统计结果列于表4。
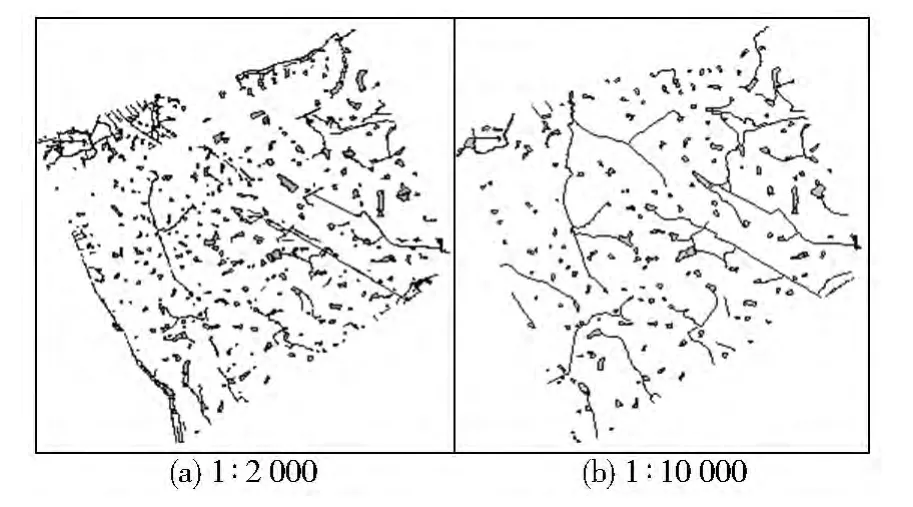
图4 不同比例尺水系数据Fig.4 Hydrographic data at different scales
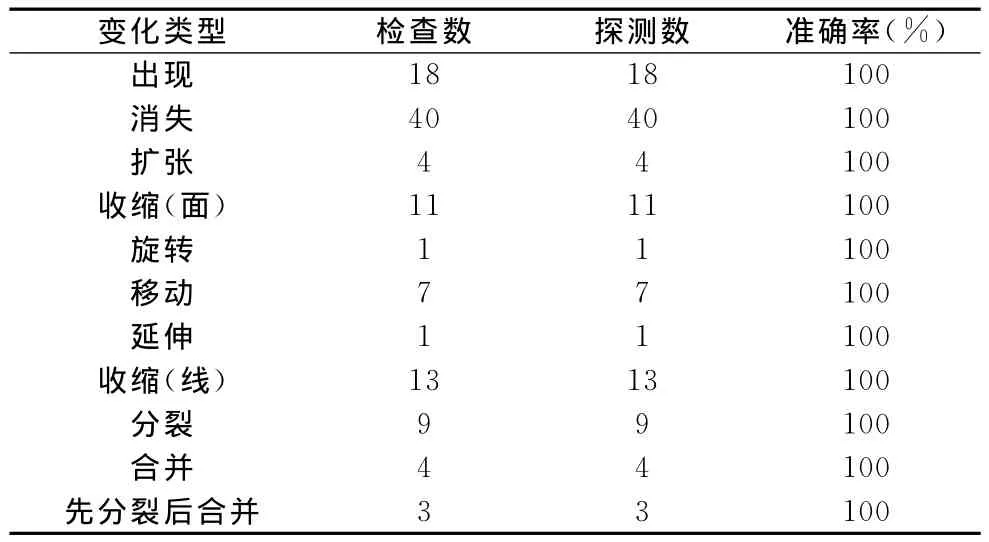
表4 水系数据变化探测结果统计Table 4 Summary of change detection results of hydrographic data
分析可知,该市水系变化类型复杂多样,这与当地气候变化和环境保护决策下的人类活动密切相关[18]。如表4,共探测出111处变化,其中主要变化类型为“消失”,共40处,约占总变化数的36.0%,“分裂”、“收缩”、“移动”变化分别发生9处、11处、7处,约占总变化类型的24.3%,其他变化类型约占39.7%。通过对比确认,变化探测结果准确,未出现判别错误与遗漏现象,进而验证了上述变化信息探测与判别方法的可靠性和有效性,亦为环境监测、生态变化评估等实际应用提供了方法参考。
3 结语
变化探测是不同比例尺地图数据级联更新的一个关键环节,已有相关研究在变化类型划分等方面差别较大,表达不一,为此本文顾及不同比例尺地图空间目标维度等差异,将水系目标变化归纳为出现、消失、延伸、收缩4种线状目标变化类型和出现、消失、旋转、收缩、扩张、移动、分裂、合并及先分裂后合并9种面状目标变化类型。不同比例尺地图表达的详细程度差异导致同一水系目标在不同比例尺地图中几何形状、维度等不同,为此本文针对忽略地图尺度和目标维度差异等的变化探测方法,分析了其局限性,指出其容易导致空间目标变化判别错误等问题,并在本文中予以解决。基于线状和面状水系目标变化类型划分,对每种变化类型进行了详细描述并提出了相应的判别规则,根据不同比例尺地图水系目标对应模式,结合判别规则,提出了不同比例尺地图水系目标变化探测方法及流程。通过不同比例尺地图水系数据的变化探测实验,结合实验区相关文献记载和实验结果的对比分析,证明了本文提出的变化探测方法的正确性和有效性,亦为类似空间目标(如道路等)的变化探测提供了方法参考。由于本文方法考虑的因素较多,还有待提高算法效率。
[1] 朱华吉.地理数据增量信息分类与表达研究[D].北京:中国科学院研究生院,2006.
[2] 应申,李霖,刘万增,等.版本数据库中基于目标匹配的变化信息提取与数据更新[J].武汉大学学报(信息科学版),2009,34(6):752-755.
[3] STEFANI C,LUCA L D,V RON P,et al.Reasoning about space-time changes:An approach for modelling the temporal dimension in architectural heritage[A].Proceedings of the IADIS International Conference Computer Graphics and Visualization[C].2008.287-292.
[4] 徐文祥.基于空间特征码的矢量要素变化检测研究[D].南京:南京师范大学,2011.
[5] 唐炉亮,杨必胜,徐开明.基于线状图形相似性的道路数据变化检测[J].武汉大学学报(信息科学版),2008,33(4):367-370.
[6] 吴建华,傅仲良.数据更新中要素变化检测与匹配方法[J].计算机应用,2008,28(6):1612-1615.
[7] CLARAMUNT C,THÉRIAULT M.Managing time in GIS:An event-oriented approach[A].CLIFFORD J,TUZHILIN A.Recent Advances on Temporal Database[C].Zurich Switzerland:Springer-Verlag,1995.
[8] ZHOU X G,CHEN J,JIANG J,et al.Event-based incremental updating of spatial-temporal database[J].Journal of Central South University of Technology,2004,11(2):192-198.
[9] 赵彬彬,邓敏,徐震,等.多尺度地图面目标匹配的统一规则研究[J].武汉大学学报(信息科学版),2011,36(8):991-993.
[10] 赵彬彬,邓敏,刘慧敏,等.多尺度地图的水系面目标与线目标匹配方法与实验[J].地球信息科学学报,2011,13(3):361-365.
[11] 张立锋,程钢,白鸿起.基于Delaunay三角网的河流中线提取方法[J].测绘与空间地理信息,2006,29(4):80-86.
[12] 张伟.基于ARCGIS的土地利用制图综合方法研究——以浙江省海盐县为例[D].杭州:浙江大学,2006.
[13] 谭笑.基于知识的线状水系要素自动综合研究[D].郑州:中国人民解放军信息工程大学,2005.
[14] 国家测绘局测绘标准化研究所.GB/T 20257.2-2006,国家基本比例尺地图图式第2部分:1∶5000,1∶10000地形图图式[S].北京:中国标准出版社,2006.
[15] QI H B.Detection and Generalization of Changes in Settlements for Automated Digital Map Updating[D].Hong Kong:The Hong Kong Polytechnic University,2009.
[16] 张利君.土地利用总体规划制图综合方法研究[D].上海:华东师范大学,2011.
[17] 黄万里,李虎,林广发.尺度变化的土地利用类型数据的综合研究[J].地理信息科学学报,2010,12(3):329-334.
[18] 刘新,何隆华,周弛.长江中下游30年来湖泊的水域面积变化研究[J].华东师范大学学报(自然科学版),2008,7(4):124-129.
猜你喜欢
山东冶金(2022年2期)2022-08-08
水利水电快报(2022年7期)2022-07-18
农村青少年科学探究(2021年11期)2021-02-24
水利规划与设计(2020年1期)2020-05-25
学苑创造·B版(2019年3期)2019-04-24
山东冶金(2019年1期)2019-03-30
河南电力(2017年4期)2017-11-30
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
山东青年(2016年2期)2016-02-28
中国教育技术装备(2015年10期)2015-03-01
