
多站式时差定位系统的误差空间分布特性
2015-02-09 01:56崔剑锋杨宝山杜敬林
测试技术学报 2015年4期
崔剑锋,杨宝山,杜敬林
(中船重工大连测控技术研究所,辽宁 大连 116013)
多站式时差定位方法广泛应用于雷达和声纳等定位系统中,探测网络由若干个测量站构成,时差定位系统是通过处理多个测量站采集到的信号到达时间数据对辐射源进行定位.在三维空间中,辐射源信号到达两站的时间差确定了一对以两站为焦点的双曲面,三维定位则需要四个测量站产生3对双曲面,交汇解出辐射源的位置.在辐射源某一坐标值(如深度信息)可以事先确定的情况下,采用3站式测量可以得到非线性解,采用4站测量可以求出线性解.
实际工作中发现,在人为误差、设备误差均较小的情况下,定位系统仍可能在某些区域出现较大的定位误差(本文把定位误差较大的区域表述为低精度区).例如在某导弹落点(落点位于海上)测量过程中,采用声、光等不同定位系统得到的测量结果在某些情况下会出现较大差异,本文旨在基于数值模拟对时差定位误差的空间分布规律进行探究,并分析其规律的形成原因.
时差定位系统由若干个位置已知的接收站(或接收阵元)组成,设辐射源的位置为未知量M(x,y,z),辐射源信号到达站点i的距离为di,则有距离方程

任意两站点的距离方程做差,以1作为参考站点,整理可得距离差方程

式中:di1为第i号站点与1号站点到辐射源的距离差;ri为i号站点到坐标原点的距离.
由式(2)构成的方程组就可以解算辐射源目标位置M(x,y,z),本文着重分析已知目标深度信息时的误差空间分布特性,即z坐标作为已知量.
1 三站式定位分析
若有三个站点接收到信号,根据式(2)可以得到二维方程组,改写为矩阵形式

解方程式可以求出坐标用d1表达,带入式(1)中,得到[3]

根据距离为正可以排除负解,当两解都为正时出现模糊解.
设定声速测量误差小于0.1%,时差测量误差小于0.04ms,站点位置测量误差小于3m,目标深度误差小于3m,设定原始误差服从均匀分布,利用计算机在确定空间区域内进行数值模拟,得到三站式定位误差的空间分布如图1,图2所示,误差值根据图示色棒比对,深色表示高精度区,浅色反之,站点坐标在图中给出.分析图示,可见三站式定位方案中的高精度区域具有指向性,在站点相对的方向高精度区覆盖范围较大,在站点两侧沿着三角形边长延长方向出现低精度区;且站点对边相对越宽,高精度区越扩展;对边相对越窄,高精度区域越压缩.因此,三站式定位误差空间分布受到站点位置的影响.

图1 三阵元定位Fig.1 Three element location

图2 三阵元定位Fig.2 Three element location
2 四站式定位分析
2.1 解算方法与数值模拟
采用四站式定位方法,可以得到三维线性方程组,求得唯一解,方程组形式如下

设定误差来源与大小同前面三站式定位误差分析一致,对不同阵型下四站式定位误差进行数值模拟,结果如图3~图8所示.

图3 正方形阵Fig.3 Square arry

图4 菱形阵Fig.4 Diamond array

图5 菱形阵Fig.5 Diamond array

图6 菱形阵Fig.6 Diamond array
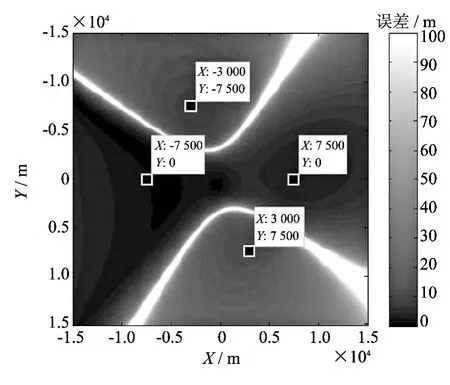
图7 平行四边形阵Fig.7 Parallelogram array

图8 任意四边形阵Fig.8 Quadrilateral array
由图可见,对正方形阵,低精度区分布在阵型的两条中线附近,从阵中心到阵外围,低精度区呈扩大趋势,从高精度区到低精度区的过渡时渐变的;对菱形阵,低精度区近似分布在某双曲线附近,菱形越扁,低精度区越压缩,并逐渐覆盖阵元后的高精度区;进而分析平行四边形阵及任意四边形阵,均有相同的规律.
2.2 分布规律原因分析
定位结果的误差来源主要是人为误差和设备误差,但特定的分布规律应该有其内在原因.
对正方形阵,设阵元坐标如图3上所标注,对系数矩阵做初等变换,当矩阵不满秩时,推知

对菱形阵,设阵元坐标如图6所示,推知系数矩阵的不满秩条件与式(6)一样;对平行四边形阵,设阵元坐标如图7所示,推知系数矩阵的不满秩条件也是式(6);对任意四边形,设阵元坐标如图8所示,推知矩阵不满秩的条件为

依据奇异矩阵导出的方程可以绘出满足条件的声源位置,构成一族曲线,如图9~图12中虚线所示.

图9 正方形阵Fig.9 Square array

图10 菱形阵Fig.10 Diamond array

图11 平行四边形阵Fig.11 Parallelogram array

图12 任意四边形阵Fig.12 Quadrilateral array
在任意阵型的四阵元定位中,对系数矩阵做初等变换,令矩阵不满秩,可得到d1,d2,d3,d4的关系满足

式(8)为非标准的双曲方程,其中,A,B,C,D为常数参量,完全由阵元位置决定.特殊的,当阵元分布为正方形时,双曲线退化为正交的两条直线.
解出的曲线与定位系统数值试验中的低精度区分布规律和位置一致,可互为验证.
由于存在测量误差,当声源的空间位置逐渐逼近奇异矩阵导出的双曲线所在位置时,空间定位误差将逐渐增大.
对比三站式与四站式定位误差的空间分布,可以发现三站式定位的高精度区域明显小于四站式定位,但三站式定位方案得到的高精度区可以基本覆盖四站式定位方案中的低精度区域,因此在实际定位过程中,采用两种解算方案进行互补,可能实现大部分区域的精确定位.
3 结 论
实际上,在深水情况下,声速沿深度方向不是一个常数,声线由声源到接收换能器的传播声线不是直线,需要利用水平传播距离与传播时间的关系来进行声速补偿.若忽略声线弯曲,或在对声速进行补偿的前提下,基于文中涉及的多站式定位解算方法,可以得到如下结论:① 多站式时差定位方法都存在低精度区的问题;相同条件下,四站式时差定位方法的低精度区域远小于三站式时时差定位方法;② 三站式定位低精度区的产生原因是非线性解出现无解与模糊解;高精度定位区域的空间分布具有指向性;③ 四站式定位低精度区的原因是解算矩阵不满秩;低精度区域与奇异矩阵导出的双曲线重合.
多站式时差定位方法在解算方法上不可避免地存在低精度区的问题,如文中分析:三站式、四站式解算方法中的低精度区域和高精度区域能够相互覆盖,若结合多种定位方法对定位算法进行互补与整合,可能减小甚至消除定位低精度区.本文暂未对此进行展开分析.
[1] 俞志强,叶朝谋.四站三维时差定位模糊分析[J].空军雷达学院学报,2009,23(5):370-372.
Yu Zhiqiang,Ye Chaomei.Study on ambiguity and non-solution of 3-D TDOA location systems[J].Journal of Air Force Radar Academy,2009,23(5):370-372.(in Chinese)
[2] 顾晓东,袁志勇,付天舒,等.多声纳基阵时差定位精度分析[J].测控技术.2005,24(4):69-71.
Gu Xiaodong,Yuan Zhiyong,Fu Tianshu,et al.Analysis of the time division of arrival of multiple sonar array[J].Measurement and control technology,2005,24(4):69-71.(in Chinese)
[3] 陈晓忠,梁国龙,王逸林,等.非同步水声定位技术及其性能评价[J].声学学报,2003,28(4):357-362.
Chen Xiaozhong,Liang Guolong,Wang Yilin,et al.Non-synchronous underwater acoustic location and it’s performance evaluation[J].Acta Acustica,2003,28(4):357-362.(in Chinese)
[4] 邓勇,周宇.无源时差定位系统的模糊无解问题[J].国防科技大学学报,1999,21(3):84-87.
DengYong,Zhou Yu.An study of ambiguity and non-solution of passive TDOA location systems[J].Journal of national university of defense technology,1999,21(3):84-87.(in Chinese)
[5] 西北工业大学应用数学系线性代数教学组.线性代数[M].西北工业大学出版社,1999.
[6] 刘伯胜.分层介质中声波传播时间和传播距离间的一个近似公式[J].船工科技,1977(1):29-32.
Liu Bosheng.An approximate equation between sound spread time and spread distance in layered medium[J].Ship industry science and technology,1977(1):29-32.(in Chinese)
[7] 王燕,梁国龙.一种适用于长基线水声定位系统的声速修正方法[J].哈尔滨工程大学学报,2002,23(5):32-34.
Wang Yan,Liang Guolong.Correction of sound velocity in long baseline acoustic positioning system[J].Jounal of Harbin Engineering University,2002,23(5):32-34.(in Chinese)
[8] 徐卫良,张启先.机器人误差分析的蒙特卡洛方法[J].机器人,1988,2(4):1-6.
Xu Weiliang,Zhang Qixian.Monte-carlo method used on robot error analysis[J].Robot,1988,2(4):1-6.(in Chinese)
[9] 赵永涛,王田苗,孙磊.基于蒙特卡洛方法的导航机器人的误差分析[J].航空制造技术,2004(3):52-55.
Zhao Yongtao,Wang Tianmiao,Sun Lei.Error analysis of navigating robot based on monte-carlo method[J].Aeronautical Manufacturing Technology,2004(3):52-55.(in Chinese)
[10] 叶朝谋,俞志强.三维时差定位系统的模糊无解分析[J].现代电子技术,2005(21):22-27.
Ye Chaomei,Yu Zhiqiang.Study on ambiguity and non-solution of 3-D TDOA location systems[J].Modern electronic technology,2005(21):22-27.(in Chinese)
猜你喜欢
北京航空航天大学学报(2020年10期)2020-11-14
电子制作(2019年14期)2019-08-20
雷达学报(2018年5期)2018-12-05
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年9期)2017-12-18
党的生活·党员电教与远程教育(2017年9期)2017-10-17
雷达学报(2017年1期)2017-05-17
- 测试技术学报的其它文章
- 机载导弹弹簧蓄能冷弹动力学仿真研究
- 高精度机动车GPS测速仪校准技术研究