
门底充水式船闸计算机控制系统的应用
2015-02-08 08:17王玉明颜亚琴
江苏水利 2015年11期
王玉明 颜亚琴
(常州市城市防洪工程管理处,江苏常州 213000)
0 引言
澡港水利枢纽工程是治太骨干工程中武澄锡低片治理的主要工程项目之一,位于常州市沿江引排骨干河道——澡港河的入江口。1998年11月开始新建,2002年6月竣工。工程具有防洪、排涝、抗旱、航运、水环境保护等多种功能,主要包括船闸、节制闸和泵站等建筑物。船闸按通航能力500吨级船队标准设计,闸室净宽16 m,闸室长190 m,上下闸首净宽12 m,闸门为平面升卧式钢闸门,采用卧式液压启闭机,油缸型号分别为 QPPYⅠ-1250-7.4(长江侧)、QPPYⅠ-1000-6.0(内河侧),输水方式为闸门门底输水。
船闸计算机自动控制系统是航运行业管理自动化、信息化的重要组成部分,涉及计算机控制、分布式数据管理、软件编程、传感器技术、通信技术等,在此基础上,运用适合工业现场的PLC技术,将能更加有效地管理好枢纽船闸。
1 系统总体设计方案
澡港船闸计算机自动控制系统采用分层分布式结构,由集中控制系统、现地控制系统、监控系统、通信系统等组成。集中控制系统通过采集和分析船闸各现地控制系统的实时数据,根据船闸运行流程,向各现地控制系统发出相应的运行指令及各项运行参数设置,再通过通信系统,实现对船闸的远程控制。现地设置PLC控制系统,可实现对船闸的单项控制[1]。
1.1 系统总体结构
澡港枢纽船闸计算机自动控制系统采用开放式全分布系统结构,分设主控级和现地单元控制级。
闸门控制中心设在上闸首控制室,设备包括:1台操作员工作站,1台视频工作站,1台硬盘录像机,1台打印机,1套UPS电源以及动力柜和LCU柜。
操作员工作站主要完成闸门的运行自动化及其管理,包括历史数据存档、归类、检索和管理,运行报表生成与打印。操作员工作站、视频工作站、硬盘录像机及PLC均通过LCU柜内的工业以太网交换机使用TCP/IP协议进行连接。
现地控制单元共2套,分别位于上下闸首的启闭机泵房内,主要用于设备检修及调试时在现地对设备进行控制。每套现地控制单元设置有3块LED数码管显示器,分别显示上下游闸外水位、上下闸首闸门开度、闸室内近上游侧水位及近下游侧水位。
上、下闸首闸门开度仪以及闸室水位仪同下位机通讯时,可在所有要通讯的仪表上设置好通讯参数,默认串口配置参数:波特率为9600,数据位为8位,停止位为1位,协议为Modbus RTU。
1.2 系统功能
系统主要功能包括:数据采集与处理、操作和控制、运行监视和显示、事件记录、故障报警、记录打印报表、数据通讯、设备运行管理等。
2 系统的实现
2.1 PLC部分
船闸控制系统PLC采用模块化程序设计,对各项控制功能及任务进行模块化划分,因此,理清各个模块的输入和输出参数,以及各个模块之间的调用关系是关键所在[2]。
2.1.1 动力拖动原理
澡港船闸计算机控制系统中PLC部分动力拖动原理是:在上闸首和下闸首均设有一个备用电机,功率为37 kW,用以保证系统正常运行,并通过采用简单的控制电路,控制电机的启动与停止。当然,在工业现场中,采用了低压断路器、热继电器和熔断器对电路做必要的保护。其中,低压断路器除了能完成电路的接通和分段外,还能对电路或者电气设备发生的短路、严重过载及欠电压等进行保护;热继电器的作用是充分发挥电动机的过载能力;熔断器用于电路的短路和严重过载保护[3]。
2.1.2 二次回路原理
PLC部分二次回路包括:现地/远程的选择、动力柜控制、控制箱对闸的控制、主泵/备泵的选择、远程/进程的选择、急停控制。其原理是通过控制继电器的线圈得电与失电,间接控制上、下闸首的电机启动与停止。
当然,任何电路中都必须有急停功能,一旦发生紧急情况,只要按下急停按钮,可同时将所有正在运行的电路断开。
2.1.3 PLC编程原理
船闸运行上行原理:下闸首闸门开,上闸首闸门关,上、下闸首阀门关;当闸室无船舶并且上行船舶可以进闸时,下游上行船舶进闸;船舶进闸后,关下游闸门,同时禁止上、下游通航;下游闸门关到位后,上游两侧阀门同时开启,闸室开始涨水;当闸室水位与上游水位相平后,开上游闸门;闸门开启到位时,上游闸首值班员指挥上行船舶出闸;待闸室船舶出尽后,上下闸首便可以重新对外通航。下行原理类似。
根据上述原理,便可进行PLC梯形图程序的设计。首先通过流程图大致了解所设计的程序,如图1所示。
由图1可知,程序根据HMI_KZ_QZD的值决定工作模式,其值为0则为全自动方式,即由监控系统自动根据水位对闸门首次开启的高度及闸门开启的级数进行控制;其值为1则为半自动方式,即当水位测量系统出现故障时,由操作人员利用“置步”按钮选择闸门首次开启的高度。
上闸首初始化主要包括以下内容:上闸门预置开度等于上闸首闸开度,当前正在执行的级数为0,水位差开启闸门时预置延迟时间等于第一级延迟时间,对水位差超时延时标志和闸门开启延时报警值进行清零。下闸首初始化设置相同。
图2为启动第一级的流程图,其余几级的运行步骤和原理相同。另外,在每一级运行时,都会开启闸门报警值,并保存相应的级数。相邻两级之间会有固定的时间间隔,最终启动上闸首闸门和下闸首闸门。上、下闸首在全自动条件下,通过闸门开度和预置开度判断来决定闸门停止运行。
另外,运行级数根据水位差决定,水位差采用如下方法计算:
上下游水位差=上闸首闸外水位-下闸首闸外水位
上闸首闸水位差=上闸首闸外水位-下闸首闸内水位
下闸首闸水位差=下闸首闸外水位-上闸首闸内水位
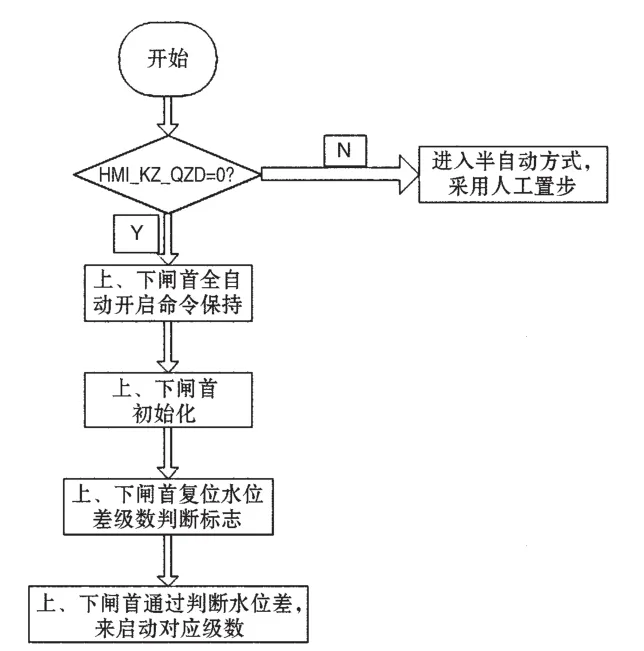
图1 主程序流程图
计算出水位差后,便可运行相应的级数,使水位差和等级形成一一对应关系。在全自动方式下,只需计算出水位差,就可以决定闸门的开度,实现智能化控制。
全自动方式下船闸的工作流程分为两种:上行过程和下行过程。假设水位差大于1.2 m时分析上行过程:闸门开启0.2 m,同时主泵运行,提高下游水位,100 s后,水位差降低,进入第二级,闸门再度开启0.2 m,60 s后,水位差进入第三级,闸门再度开启0.3 m,60 s后,进入第四级,闸门再度开启0.5 m,随后水位差已经能够达到第五级,此时下游闸门全开,船只进入闸室,同时关闭下游主泵。在闸室的船只,采用同样的原理,根据水位差决定上游主泵的打开时间,在不断充水的同时,不断开启闸门,直至全开,最后关闭上游主泵,船只离开闸室。
本系统的优势主要在于,即使水位测量系统出现故障,也可在半自动方式下运行,即由操作人员利用“置步”按钮选择闸门首次开启的高度,再根据水位差逐步开启闸门。
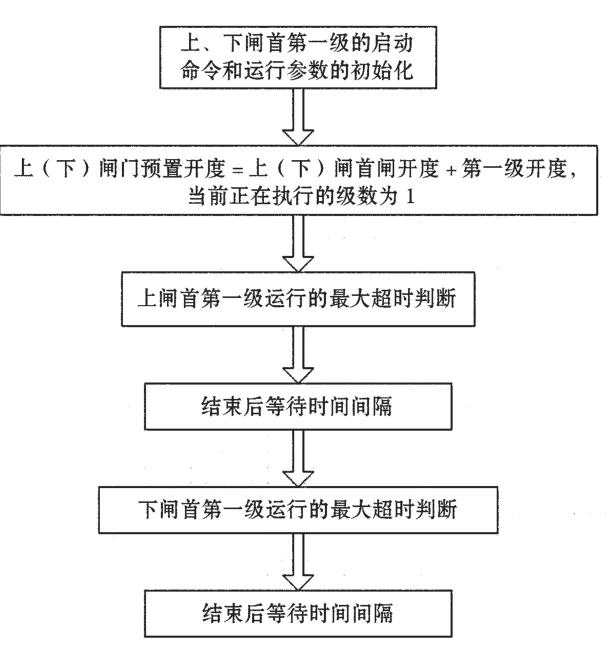
图2 运行第一级流程图
2.2 上位机部分
对上位机部分进行操作时,要特别注意遵循系统的启动顺序:网络设备电源投入,现地控制单元电源投入,监控室控制单元电源投入,监控计算机启动,运行监控软件,以保证操作的正确性。
2.2.1 平水行舟控制
在控制界面可以对闸门进行开启、停止和关闭操作。平水行舟控制流程见图3。
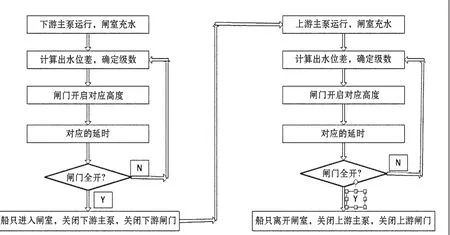
图3 平水行舟控制流程图
在正常开启和关闭闸门前,先选择平水行舟运行方式,并选择所要操作的闸门是上闸首还是下闸首,再选择所用的油泵是主泵还是备泵,然后查看控制方式是否为远程,最后分别点击“上升”“下降”“停止”按钮进行控制。操作人员在按此种方式操作时,应时刻注意闸门开度的数值变化,并通过视频对闸门实际动作的画面进行监控,以应对可能的突发事件。操作界面如图4所示。
参数设置界面如图5所示。
2.2.2 数据报表
报表软件主要是为用户提供事件、报警和过程的历史数据查询、导出和报表打印等功能。
数据库配置主要是修改报表软件所关联的数据源,主要设置主机名、数据库名、用户名和用户密码。特别注意的是,在修改参数后必须重新启动软件才能生效。
事件查询窗口主要是对系统中执行的主要操作记录进行查询。当用户进行查询时,要选择好类型、起始时间和结束时间,查询结果。当用户想保存当前查询的数据时,可以用Excel格式导出数据。
3 结语
笔者详细介绍了澡港船闸计算机监控系统的设计与运用,PLC的运用可使整个系统的运行更加稳定、可靠、安全,使船闸的可控性得到保障。
经实践验证,计算机监控系统动作准确,整体运行连续性好,满足船闸通航需要。本系统的成功设计、调试及运行,不仅保证了澡港船闸的安全可靠运行,而且为同类型船闸计算机监控系统的设计和运行积累了一定的经验。
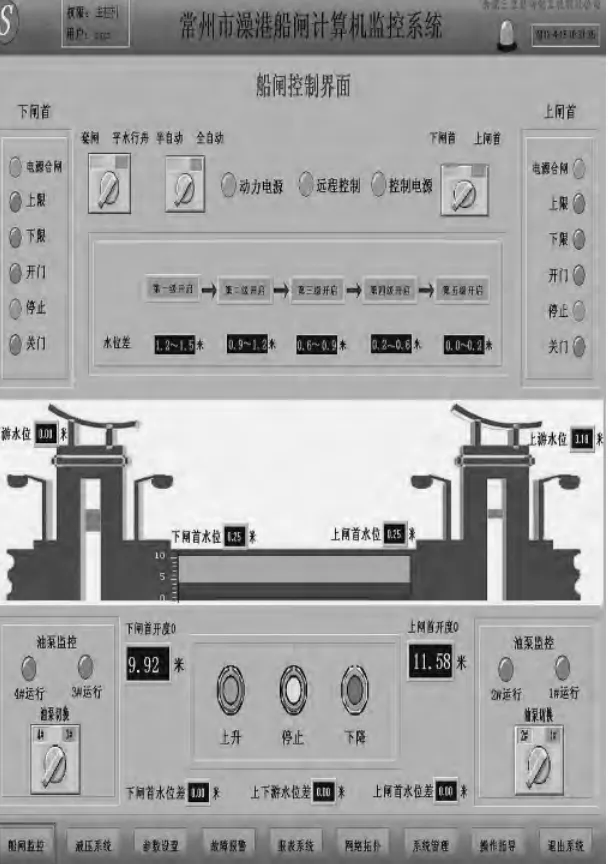
图4 平水行舟控制界面
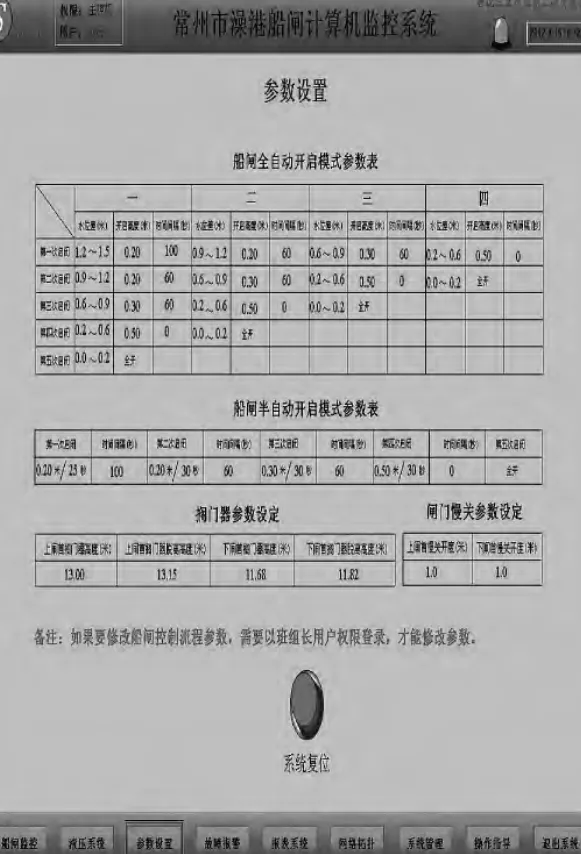
图5 参数设置界面
[1] 石晓松,易春辉,黄建平.基于分层控制的闸门群自动控制设计[J].水电自动化与大坝监测,2007(4).
[2] 曾繁玲.施耐德PLC、变频器入门与应用实训[M].北京:中国电力出版社,2011:125-176.
[3] 吴建强.可编程控制器原理及其应用[M].北京:高等教育出版社,2010:1-20.
猜你喜欢
防爆电机(2022年3期)2022-06-17
交通科技与管理(2022年9期)2022-05-24
水上消防(2020年4期)2021-01-04
水运工程(2020年7期)2020-07-27
中国电业与能源(2019年4期)2019-05-13
水利科技与经济(2017年8期)2017-04-22
工程建设与设计(2016年2期)2016-08-22
电站辅机(2016年4期)2016-05-17
水利科技与经济(2016年6期)2016-04-22
水利规划与设计(2016年7期)2016-02-28
- 江苏水利的其它文章
- 胸墙在水闸闸室结构中的“扁担效应”