
基于机载LiDAR数据的城区道路中心线提取
2015-02-07 07:44:19万幼川何培培
地理空间信息 2015年4期
杨 威,万幼川,何培培
(1.武汉大学 遥感信息工程学院,湖北 武汉 430079)
基于机载LiDAR数据的城区道路中心线提取
杨 威1,万幼川1,何培培1
(1.武汉大学 遥感信息工程学院,湖北 武汉 430079)

提出一种基于离散点的道路中心线提取方法。在利用高程、强度和几何形状等多特征逐步约束提取出条带道路点的基础上,采用迭代Meanshift算法将条带道路聚集成线状点集,并通过分段Hough变换检测出矢量道路中线。实验表明,该方法克服了传统中心线提取方法中的精度损失,提高了准确度。
机载LiDAR;道路中心线;迭代Meanshift;分段Hough变换
从机载LiDAR点云数据中提取道路可以分为2个过程:分类和矢量化[1]。分类即从原始点中分割出道路点;矢量化即从条带状的道路点中提取出矢量的道路信息,包括道路中心线、道路宽度等。其中,道路中心线的提取是矢量化过程中最为重要的一环,国内外众多学者对此进行了研究。Clode等[1]首先将道路点转化为二值影像,然后采用PCD(phase coded disk)方法提取中心线;彭检贵等[2]引入a-shapes算法从道路条带中提取出轮廓线,然后将轮廓线包围的区域栅格化,采用数学形态学细化方法提取出道路中线;徐景中等[3]将道路点生成不同尺度的影像并分别细化,采用多尺度追踪方式提取中心线;Hu等[4]和Couloigner等[5]分别采用Hough和Radon变换从生成的影像中提取道路中心线。上述方法虽然取得了相应效果,但还存在以下问题:①将离散道路点转化为栅格影像,丢失了原始信息,降低了数据精度;②道路中心线的位置受到道路两侧边缘的干扰,产生偏移;③提取出的道路矢量无法满足道路的光滑性要求(如PCD、细化等),且部分方法所能检测出的道路线型有限(如Hough、Radon变换等)。鉴于此,本文提出一种基于离散点云的道路中心线提取方法。
1 基于离散点的道路中线提取
1.1 基于Meanshift的中心线聚集
Meanshift算法[6]的基本思想是:对于空间中的样本点,任选一点X作为当前点,计算该点的邻域均值Mx并将其移动至均值处,以此作为新的起点,重新计算均值,直至不再移动。漂移均值计算公式如下:

式中,N(x)表示落入当前点x一定邻域内的样本点集;k为该邻域中样本点总数。
本文首先采用多特征逐步约束方法从原始点中提取出初始的道路条带,主要步骤为高程约束、强度约束和几何形状约束等,具体过程见文献[2]。在已提取出的初始条带道路中,边缘点具有较小的点密度,越靠近中心,点密度越大。根据这一性质,可利用Meanshift算法从条带道路中探测出道路中心。如图1所示,道路边缘点经过Meanshift后,向着道路中心聚集,从而使原本为条带分布的道路点“细化”成线状,形成初始道路中心线。

图1 Meanshift道路中点聚集原理示意图
基于Meanshift的道路中心线聚集的关键在于平面窗口尺寸(即邻域)的确定。窗口过小,聚集的中心线仍为条带状;窗口过大,由于道路点云分布不均匀,会使漂移陷入局部最优,即部分道路中心点向着附近其他具有更大点密度的中心点漂移,使得聚集的道路中心线发生断裂。为此,本文首先利用点密度探测粗略窗口大小[7],进行初次Meanshift,然后采用统一平面窗口进行二次Meanshift。具体步骤如下:
1)设置区域道路最大宽度Wthmax、最小宽度Wthmin和宽度增量Δ Wth;
2)以最小宽度作为初始窗口计算当前点的点密度,如果点密度大于给定的密度阈值Tden,将窗口尺寸增加一个宽度增量,重新计算点密度,直到点密度小于阈值或者窗口尺寸大于道路最大宽度;
3)将第2)步中确定的窗口尺寸作为当前点的平面窗口进行Meanshift迭代漂移;
4)对道路条带所有点,重复2)~3);
5)以道路最小宽度作为统一的平面窗口对所有点进行二次Meanshift,得到最终的道路中心点集。
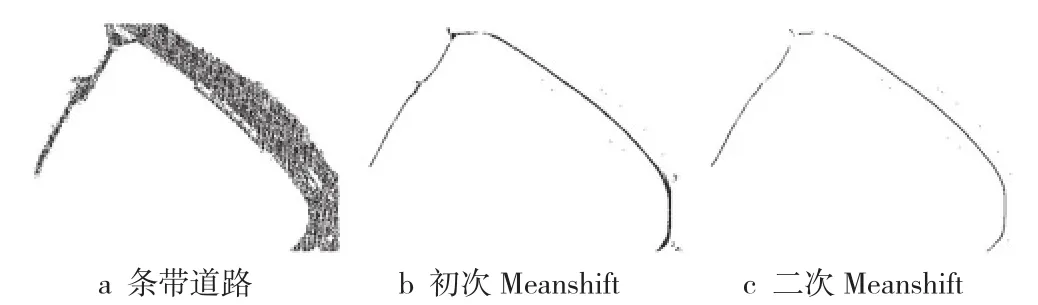
图2 不同宽度道路迭代Meanshift结果
1.2 分段Hough变换检测中心线
通常,如果道路点分布均匀且平面窗口选择合适,道路边缘点仅会产生垂直于道路走向的“纵向漂移”。但是,由于道路宽度多变、道路点分布并不均匀,导致道路点产生沿着道路走向的“横向漂移”,使得聚集的中心线发生断裂,这在道路交叉口处尤为明显(如图3),而这也为分段Hough变换提供了基础。

图3 道路交叉口断裂示意图
选择圆弧作为检测的形状基元,对道路中心点集分段进行Hough变换。该过程通过以下2个步骤完成:
1)分段。输入任意一点,以该点为种子点进行区域增长,将总点数大于阈值Tnum的连接体作为待检测道路点集。搜索该点集中距离最远的两点,将其作为端点连接成直线,计算其他点到该直线的最远距离Dmax,若Dmax〉 Tdis,则将该连接体在距离最远处打断;重复该过程,直到不再有新的连接体产生。从图4中看出,一些具有复杂线型的道路经过此过程,被分割成曲率单一的弧线。
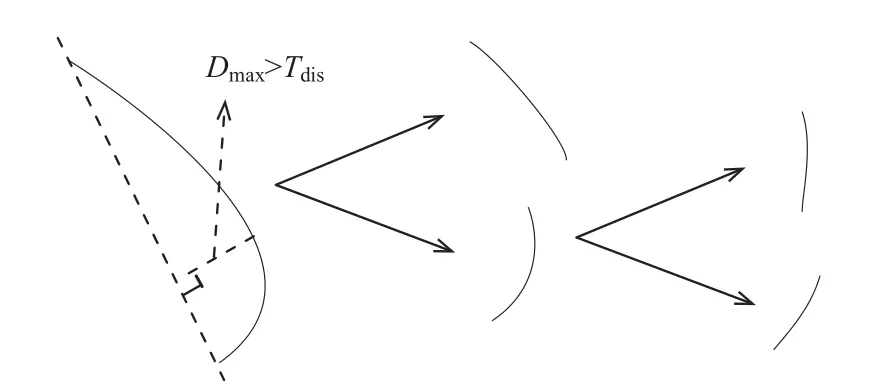
图4 连接体分段过程
2)Hough变换。圆的参数方程为:

其中,(a,b)为圆的圆心;r为圆的半径。通常,待检测圆弧具有3个未知参数,Hough变换的参数空间可以表示为(a,b,r)。假设已知圆弧上两点,则待检测圆弧的圆心位于两已知点连线的中垂线上,故只需确定一个参数(即圆弧的半径),即可确定圆的参数方程。因此,为减小Hough变换的参数空间,提高算法效率,对于分段后的连接体,将其2个端点作为圆弧上的已知点进行Hough变换,变换的参数空间为半径r。
1.3 道路编组和连接
经过以上步骤提取出的道路中心线为彼此断开的圆弧段基元,需进行编组并连接。分层感知编组方法[8]通过分析道路基元的连续性、邻接性和相似性,计算道路基元之间的连接概率矩阵,将具有最大连接概率的道路基元连接,重新计算概率矩阵并连接最大概率基元,直到最大连接概率小于阈值。利用该方法,对提取的圆弧道路基元进行编组连接,从而形成完整的道路中心线网络。
2 实验与分析
采用ISPRS提供的用于城市地物分类和建筑物重建的试验数据对算法进行验证。数据采集地为德国斯图加特的Vaihingen小镇,LiDAR点云由Leica ALS50系统获取,平均点密度为4 pts/m2,对应DMC影像分辨率为8 cm。如图5所示,该区域地物复杂,建筑物和树木密集,且道路宽度和形状多变,具有代表性。
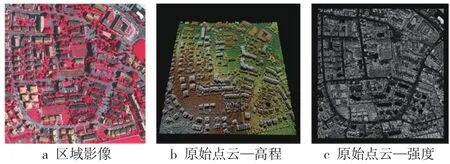
图5 实验数据
实验过程中的主要参数设置如下:
1) 迭代Meanshift过程中的最大宽度设置为30 m,最小宽度设置为4 m,控制窗口尺寸的点密阈值设置为0.8 pts/m2;
2) 分段Hough变换检测圆弧过程中连接体包含的最小点数设置为10,分段的距离阈值为5 m,圆弧半径r的取值范围设置为(1 m,10 000 m),步长为1 m。
实验结果如图6所示。其中,图6a为多特征逐步约束提取的初始道路条带;图6b、c为进行迭代Meanshift算法后所聚集的道路中心点集;图6d为分段Hough变换检测出的道路圆弧段;图6e为经过编组连接后叠加到对应影像上的道路网;图6f为将道路条带转化为栅格影像后,采用数学形态学细化方法得到的道路中心线;图6g~i为黄色矩形框内的初始道路条带和两种方法提取结果的放大显示。

图6 实验结果
为定量评价算法效果,以手动提取的道路中心线作为参考,对提取的道路中心线进行精度评定。各项指标定义如下[9]:

其中,TP为匹配的道路长度;FN为未提取的道路长度;FP为误提取的道路长度。经统计,TP=4 555.64 m、FN=654.38 m、FP=607.79 m,评定结果如表1所示。
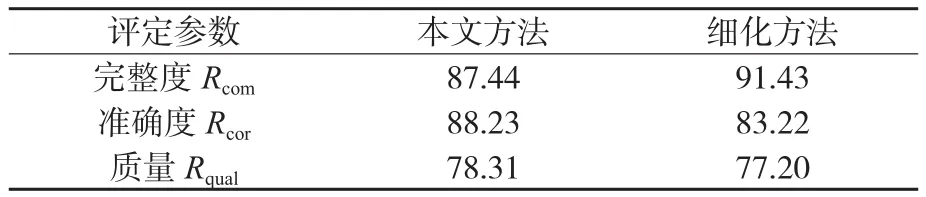
表1 道路提取精度评定表/%
从结果可以看出,整个数据区域中,主要道路被完整提出,提取的道路完整度和准确度均在85%以上,结果质量达78.31%。图6e显示,使用该方法从不同宽度、不同线型的道路条带中提取的中心线均具有较好的效果。图6f为采用细化方法提取出的道路中心线,与图6e对比可发现,细化方法提取的中心线在形态上表现真实道路的能力较弱,提取的中心线更容易受到道路边缘的干扰而产生偏离,降低了准确度。如图6g~i所示,在道路交叉口处,细化方法的部分提取结果发生了明显的偏离,而采用迭代Meanshift和分段Hough相结合的方法则能克服这一问题。但是,该方法在完整度上稍有不足,这是由于在迭代Meanshift聚集过程中,道路端点会发生“纵向漂移”,从而导致道路长度缩短。整体来说,本文方法提高了道路中线提取的准确度,使结果质量得到改善。
3 结 语
本文在多特征逐步约束提取道路条带的基础上,提出一种基于迭代Meanshift和分段Hough变换的道路中线提取方法。该方法具有以下优点:①过程完全基于离散的道路点集,避免了传统方法中内插生成影像造成的精度损失;②对于不同宽度、不同线型的道路均具有较好的提取效果;③在保证完整度和准确度的同时,提取的光滑道路中心线更加接近真实道路形态。同时也有一些不足:①该中心线提取方法的精度首先受制于条带道路的提取精度,基于多特征约束提取出的条带道路是否准确对中心线提取结果有重要的影响;②迭代Meanshift聚集过程中窗口尺寸的选择尚未自动化,有待进一步研究。
[1] Clode S, Rottensteiner F, Kootsookos P, et al. Detection and Vectorization of Roads from LiDAR Data[J]. American Society for Photogrammetry and Remote Sensing, 2007, 73(5): 517-535
[2] 彭检贵, 马洪超, 高广, 等.利用机载LiDAR点云数据提取城区道路[J].测绘通报,2012(9):16-19
[3] 徐景中, 万幼川, 赖祖龙. 机载激光雷达数据中道路中线的多尺度提取方法[J].红外与激光工程,2009, 38(6): 1 099-1 103
[4] Hu X, Tao C V, Hu Y. Automatic Road Extraction from Dense Urban Area by Integrated Processing of High ResolutionImagery and LiDAR Data[C]. ISPRS, Beijing, 2009
[5] Couloigner I, Zhang Q. Iterative and Localized Radon Transform for Road Centerline from Classified Imagery[C]. ICIAR, Montreal, 2007
[6] Fukunaga K, Hostetler L. The Estimation of the Gradient of a Density Function, with Applications in Pattern Recognition [J].IEEE Trans Information Theory, 1975, 21(1): 32-40
[7] Hu X, Li Y, Shan J, et al. Road Centerline Extraction in Complex Urban Scenes From LiDAR Data Based on Multiple Features [J]. IEEE Trans Geoscience and Remote Sensing, 2014, 52(11): 7 448-7 456
[8] Hu X, Tao C V. Automatic Extraction of Main Road Centerlines from High Resolution Satellite Imagery Using Hierarchical Grouping [J]. Photogrammetric Engineering and Remote Sensing, 2007, 73(9): 1 049-1 056
[9] Heipke C, Mayer H, Wiedemann C. Evaluation of Automatic Road Extraction [J]. International Archives of Photogrammetry and Remote Sensing, 1997,32:47-56
P237.9
B
1672-4623(2015)04-0075-03
10.3969/j.issn.1672-4623.2015.04.027
杨威,硕士,主要研究方向为机载激光点云数据处理。
2014-12-11。
项目来源:国家高技术研究发展计划资助项目(2013AA122104-3);博士点基金资助项目(20130141130003)。
猜你喜欢
高中数理化(2023年6期)2023-08-26 13:28:24
中学生数理化·自主招生(2022年9期)2022-05-30 10:48:04
中学生数理化·高一版(2021年3期)2021-06-09 06:10:20
中学生数理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:28
中学生数理化·高一版(2020年1期)2020-02-20 13:24:34
科学导报(2018年30期)2018-05-14 12:06:01
——目镜套筒
上海计量测试(2016年1期)2016-08-03 11:30:56
中外医疗(2015年5期)2016-01-04 03:57:53
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:54:00
Chinese Journal of Chemical Engineering(2014年3期)2014-07-24 15:40:13
