
光伏并网发电系统的虚拟平台设计
2015-01-27 06:30:01郭天勇
自动化与仪表 2015年10期
郭天勇,陈 晨
(南开大学 计算机与控制工程学院,天津 300071)
作为一种可再生能源,太阳能的发展及应用远没有达到预期的目标,针对光伏电站在实际研究中受到外界条件的制约,基于软硬件的光伏电池模型研究已经比较成熟,最大功率点跟踪算法也是研究的热点,主要集中在扰动观察法[1-2]、电导增量法[3-4]及各种改进的算法[5-6],目的是降低输出功率在峰值处的波动及提高跟踪的响应速度。
本文基于Matlab/Simulink搭建了光伏并网发电系统的仿真模型,并利用GUI建立可视化界面,利用该模型可方便地进行最大功率点跟踪、逆变控制系统等算法的验证。
1 光伏并网发电系统结构
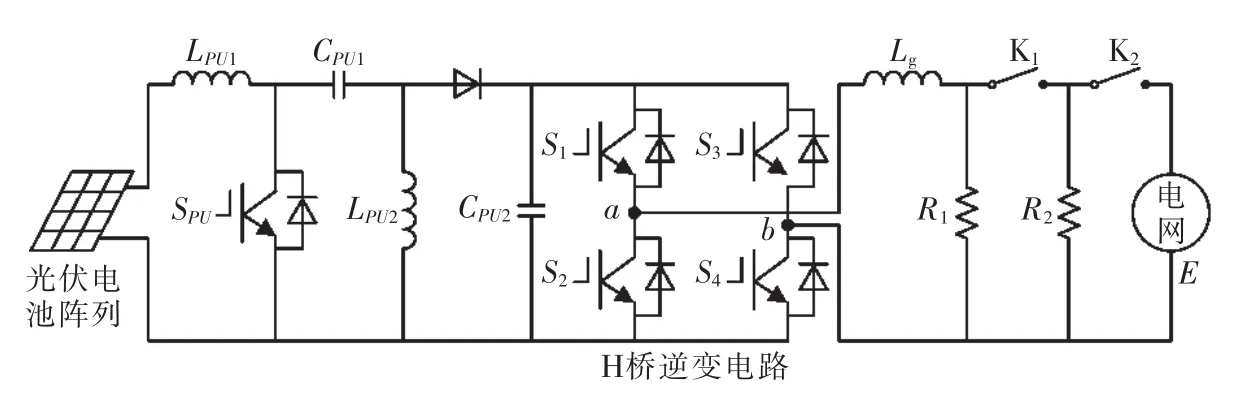
图1 系统电路结构Fig.1 Circuit diagram of system
该系统主要包括:光伏电池模型、DC/DC拓扑、逆变电路和控制系统,其电路结构如图1所示,其中,DC/DC采用的是SEPIC拓扑,逆变电路采用单相H桥结构,控制系统采用的是DSP,并网端有K1和K22个开关,主要是保证关键负载R2的不间断供电。
2 光伏电池模型
光伏电池主要是利用半导体的光生伏特效应将太阳能直接转换成电能,它的等效电路如图2所示[7]。
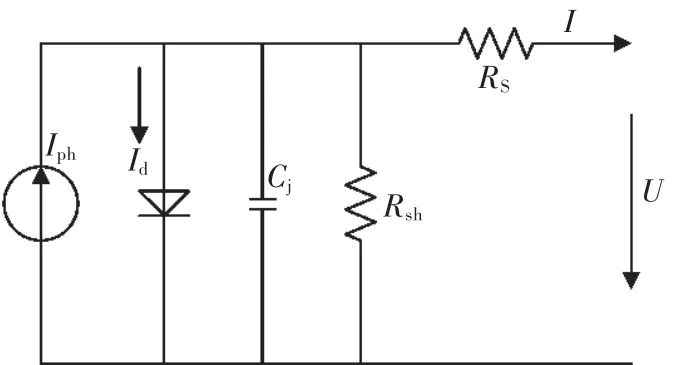
图2 光伏电池等效模型Fig.2 PV cell equivalent model
其中,Iph为光生电流;Id为二极管结电流;Cj为结电容(可忽略);Rsh为并联电阻,它的阻值数量级为103Ω;RS为串联电阻,阻值小于1 Ω;I为电池模型输出电流;U为电池模型输出电压。
利用该电路进行分析得到的电流解析式,常用在理论分析中,而在实际工程电路中,通常对其进行简化,在考虑太阳日照强度和太阳温度影响时[8-9],工程中常用的光伏阵列I-U方程为

其中,

式中:α为参考日照下电流变化温度系数,(A/℃);β为参考日照下电压变化温度系数,(V/℃);R为太阳能电池上的日照强度;Rref为日照强度参考值,通常为1000 W/m2;Tc为太阳能电池温度;Tref为温度参考值,通常为25℃;T为环境温度;tc为太阳能电池温度系数。
结合光伏电池实际参数及式(1)和式(2),可建立基于Matlab的光伏电池模型,其外部封装如图3所示,该模型已广泛应用在光伏电池的理论研究中。

图3 光伏电池封装模型Fig.3 Packaging model of solar cell
3 DC/DC拓扑及最大功率点跟踪
鉴于SEPIC拓扑的特点,本文利用Sim Power Systems库中的分离元件搭建了该电路拓扑,具体可参考图1。该拓扑根据占空比的不同可实现升降压,扩大了光伏最大功率点跟踪的电压调节范围。
图4是利用图3所示的光伏电池模型在不同条件下得到的I-U和P-U特性曲线,图4(a)是一个双纵坐标的输出曲线,其中上边的曲线对应左侧的纵坐标是电流,下边的曲线对应右侧的纵坐标是功率,横坐标是电压。从中可以看出,外界条件变化时,电流与电压均发生变化,变化幅度较大的是电压信号。图4(b)是不同外界条件及条件变化时的P-U曲线,由于输出电压不会突变,当外界条件稳定的时候,即输出功率在一条曲线上移动时,最大功率点跟踪比较容易。而当外界条件发生变化,即输出功率不在一条曲线上变化时,最大功率点跟踪相对要复杂些,而在实际情况中,此种情况占大多数。此时变化如图4(b)所示,在电压保持不变时,输出功率从一条曲线跳转到另一条曲线上。
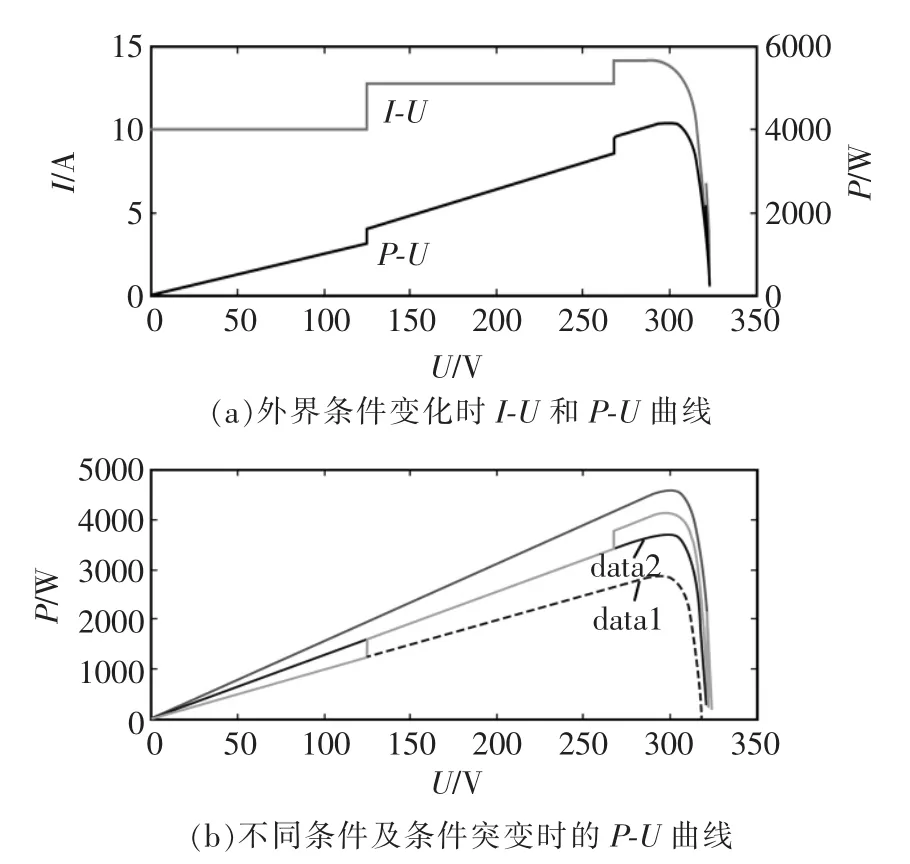
图4 不同条件下的I-U和P-U特性曲线Fig.4 I-U and P-U characteristics curves in different conditions
本文将二分法引入到扰动观察法中,与传统扰动观察法的主要区别在于其扰动的步长是可以改变的,此种方式可以有效地提高最大功率跟踪的响应速度并降低扰动量。假定初始步长设为Δd,该值要比传统的步长稍大些,目的是为了快速找到功率变化的转折点,当第一次出现功率变化量改变方向时,将步长变为初始的一半即Δd/2,再继续扰动,为了防止频繁的扰动,设置了一个误差允许范围,当功率变化量落在该范围时,停止扰动,系统正常运行;当功率变化量突然变大时,再次将步长恢复到初始值Δd,并继续扰动以找到新的最大功率输出点。具体流程如图5所示。
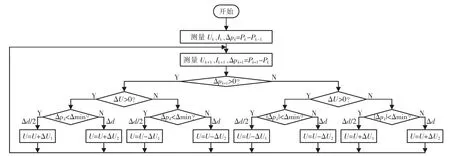
图5 变步长扰动观察法Fig.5 Variable step perturbation and observation method
图中:Δmin为设置的功率变化最小值;Δd为扰动步长,它对应的电压变化量为ΔU2,Δd/2对应的电压变化量为ΔU1,其中d是开关管的导通占空比,结合本文的实际电路,主要是通过控制开关管SPU实现光伏阵列的最大功率点跟踪。
4 逆变电路及控制策略
逆变电路采用H桥结构,如图1所示,需要注意的是要防止同一桥臂上的2个开关管同时导通,即预防开关管因过流而损坏,此时需要加入死区时间,开关管通常采用IGBT,其驱动采用SVPWM信号[10]。
为了保证输出电压的幅值和频率满足并网需求,采用双闭环的控制策略,系统并网运行时,内部采用并网电流环,其相位与电网电压相位同步,而其幅度则由外环决定;外部采用母线电压环,主要作用是获得稳定的直流母线电压,保证系统的可靠运行。而当系统独立运行时,即系统输出不满足并网条件或者电网停止供电时,只要输出电压满足负载需求即可,不需考虑与电网相位同步。
5 虚拟平台的搭建
利用Matlab GUI搭建了光伏并网发电系统的虚拟平台,利用Simulink进行模型的搭建,系统框架如图6所示。
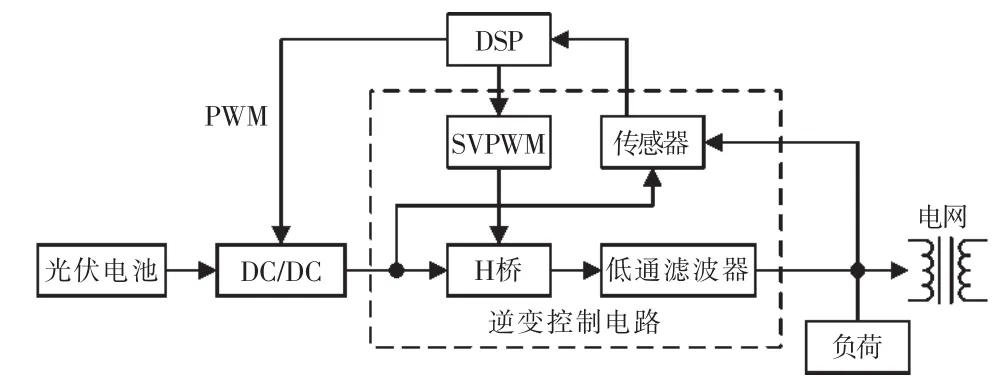
图6 光伏并网发电框图Fig.6 Block diagram of PU grid-connected generation
Matlab仿真模型如图7所示,最左侧的是前面提到的光伏电池模型,通过编程可以在某个时刻改变外界条件,使其输出功率发生变化,控制器根据检测到的信号利用基于二分法的扰动观察法进行最大功率点跟踪,实验结果比较理想,能快速有效地实现最大功率点跟踪,如图8所示,中间的变化曲线是最大功率跟踪仿真曲线。
6 结语
利用Matlab GUI软件搭建了光伏发电虚拟平台,结合天气预报可利用编程实现外界条件的设定,同时结合实际的外界环境监测可及时地进行功率输出预测,从而进行预判断,同时利用该模型还可以进行并网控制算法的研究,为后续研究奠定了基础。
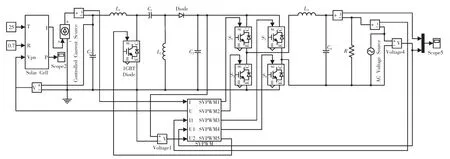
图7 光伏并网发电模型Fig.7 Model of PU grid-connected generation
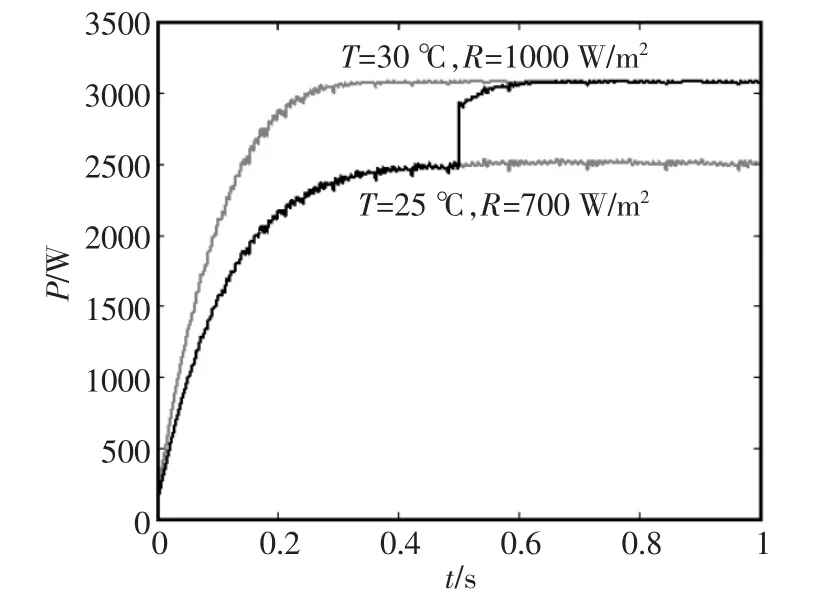
图8 最大功率跟踪仿真曲线Fig.8 Simulation curves of maximum power point tracking
[1]王飞,苏建徽,余世杰.太阳能光伏并网发电系统的研究[J].电工技术学报,2005,20(5):72-74.
[2]刘邦银,段善旭,刘飞,等.基于改进扰动观察法的光伏最大功率点跟踪[J].电工技术学报,2009,24(6):91-94.
[3]郭明明,沈锦飞.基于改进变步长电导增量法光伏阵列MPPT研究[J].电力电子技术,2011,45(7):14-16.
[4]马帅旗.光伏发电系统最大功率跟踪研究[J].电源技术,2013,37(9):1595-1598.
[5]张超,何湘宁.电流结合扰动观察法在光伏发电最大功率点跟踪控制中的应用[J].中国电机工程学报,2006,26(20):98-102.
[6]吴海涛,孙以泽,孟婥.粒子群优化模糊控制器在光伏发电系统最大功率跟踪中的应[J].中国电机工程学报,2011,31(6):52-57.
[7]张兴,曹仁贤.太阳能光伏并网发电及其逆变控制[M].北京:机械工业出版社,2011.
[8]茆美琴,余世杰,苏建徽.带有MPPT功能的光伏阵列Matlab通用仿真模型[J].系统仿真学报,2005,17(5):1248-1251.
[9]苏建徽,余世杰,赵为,等.硅太阳电池工程用数学模型[J].太阳能学报,2001,22(4):409-412.
[10]易龙强,戴瑜兴.SVPWM技术在单相逆变电源中的应用[J].电工技术学报,2007,22(9):112-117.
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
河北理科教学研究(2020年2期)2020-09-11 06:15:48
数学物理学报(2019年4期)2019-10-10 02:38:56
电子测试(2018年13期)2018-09-26 03:29:34
电源技术(2017年1期)2017-03-20 13:38:08
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
电源技术(2015年11期)2015-08-22 08:50:38
电源技术(2015年12期)2015-08-21 08:58:40
河北科技大学学报(2015年5期)2015-03-11 16:16:37
