DVD激光头的补偿控制电路的仿真和分析
2015-01-25 10:51张红彬
电子设计工程 2015年4期
钟 英,郭 锋,张红彬
(西南科技大学 信息工程学院,四川 绵阳 621000)
随着微纳米元件的发展,微纳米测量技术也随之越来越受到人们的重视,出现了诸如激光干涉仪、电感测微仪、高精度电容式传感器、霍尔式微位移传感器等微位移感测设备,但是存在价格昂贵(如激光干涉仪)、精度偏低(如电感测微仪)和使用受限(如电容式很难做成扫描式测头、霍尔式要求被测件具有导电性)等缺点[1]。
DVD激光头因具有集成度高、价格低廉、适用范围广等特点,被越来越多的改造成为非接触式微位移扫描探头用于微纳米测量,但是其线性感测范围较小,需要通过其他方法来增大其线性感测范围。目前主要的方法有增大DVD激光头内部的四象限感测器的面积、减小DVD激光头的数值孔径角等方法,但是因为DVD激光头是高度集成的元件,对其内部改造容易影响其精准性且不易实施[1]。
本文通过补偿控制电路,对音圈电机的迟滞影响进行相位补偿,实现了相位超前17°左右,并提高了系统的增益10 dB,使激光头的感测范围的明显增大。
1 机械系统结构
在DVD激光头中,弹簧系统不仅承载着聚焦物镜、音圈马达,同时也提供弹性恢复力与音圈电机的磁力保持平衡,如图1所示。

图1 弹簧系统受力图Fig.1 The spring system diagram
在这个机械系统中,物镜、线圈的总质量为m,弹簧系数为k,阻尼系数为c,在外力f(t)的作用下发生方向位移为x(t),对这个系统可以列出动态方程,并对其动态方程进行Laplace变换可以得到方程式

对方程(1)移项可得到这个弹簧系统的转移函数为

由公式(2)可以看出,该系统的转移函数是一个二阶系统,故可用一个标准的二阶系统函数表示,可得到该系统的闭环传递函数为

其中wn为自然共振频率,ξ为阻尼比 。
2 补偿控制电路
DVD激光头是一个高度集成的元件,它对系统响应有相位延迟,因此,如果没有合适的控制系统可能会导致系统不稳定并影响测试数据的精准性。补偿控制电路的作用主要有两点:1)提高系统的增益,2)补偿相位滞后。根据这两个主要特点我们可以画出这个补偿电路的系统框图如图2所示,H(s)为加入的补偿控制电路系统传递函数,在H(s)中采用了相位超前校正装置,其传递函数为,Φ(s)为原机械系统的开环传递函数。加入补偿控制电路能够改善系统回路的相对稳定度,并减小稳态误差[3]。
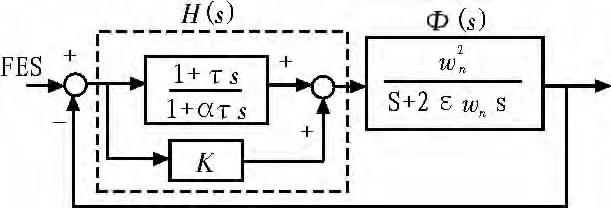
图2 补偿控制电路框图Fig.2 Compensation control circuit diagram
由图 2可知,H(s)的传递函数为

由它的传递函数可以求出它的增益为

它的相位可以表示为

从公式(5)和公式(6)中可以看出系统的增益和相位由K、α、τ3个参数决定。为了简单起见,令τ为RC电路的计算值,K是一个变量,α由最大相位超前决定。从频率响应分析可以发现,增益随着K值增大而增大,但是超前相位会随之减小,因此在选择参数时,要平衡K值和超前相位之间的关系[4]。
补偿控制器采用经典的比例积分微分控制器来实现,如图3所示。在实际的工程应用中,比例积分微分控制器应用最为广泛,简称PID控制。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,应用PID控制技术最为方便。它是根据系统的误差,利用比例、积分、微分计算出控制量进行控制 。在图3中,A1、A2、A3分别为微分控制、积分控制和比例控制环节。
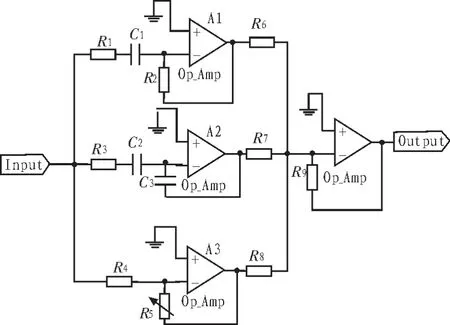
图3 补偿控制电路模拟电路图Fig.3 Compensation control circuit analog circuit diagram
令R6=R7=R8=R9时,可以得到图3的频率响应函数为

令 C1=C2=C3=C,R1=R3=R,将公式(4)与公式(7)进行比较可以得到 Κ=R5/R4,τ=R2C,α=R/R5。DVD激光头的线性感测范围会随着K增大而增大,但是相位超前会随着K值增大而减小,故K值的选择很重要。通过实验发现,K=2,τ=0.001 6,α=0.017 16时为最佳参数[4]。
3 电路分析和仿真
确定系统参数后,可以对加入补偿控制电路前后的系统分别绘制波特图加以分析,如图4所示,将图4(a)和图4(b)的波特图进行比较分析可以看出,加入补偿控制电路前系统的增益为0 dB,加入补偿控制电路后的系统增益为10.3 dB,增益提高了10 dB左右,且加入补偿电路后的系统的相位裕度大于补偿前电路的相位裕度,故可知加入补偿控制电路后,系统的稳定性更好[6]。从相频响应图中我们可以看出,加入补偿控制电路后的系统相位超前于补偿前的电路系统相位,可知该补偿电路具有补偿相位滞后的作用。当加入补偿控制电路后,整个系统的增益会增大,随之该系统的输入信号,即DVD激光头的聚焦误差信号通过该系统后也会增大,聚焦误差信号与焦点偏离反射面的距离在一定范围内呈线性关系[7],相应的,DVD激光头的线性感测范围也会增大。
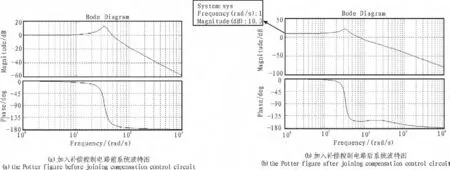
图4 加入补偿控制电路的系统波特图Fig.4 The Potter figure about joining compensation control circuit
对该补偿控制电路用multsim进行仿真,先绘制出如图5所示电路图, 令 C1=C2=C3=1.6μF,R1=R3=170Ω,R6=R7=R8=R9=1 kΩ,运行该电路,可以得到如图6所示波形图。
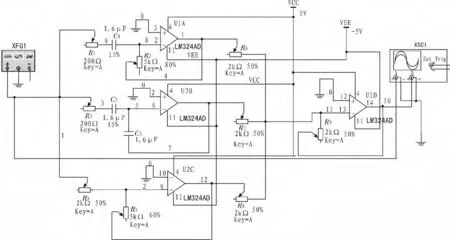
图5 补偿控制电路仿真电路图Fig.5 Compensation control circuit simulation circuit diagram

图6 Multsim仿真波形Fig.6 The simulation waveform from Multsim
从图6(a)我们可以看出输入波形峰值为199.943 mV,从图6(b)可以看出输出波形峰值为648.149 mV,输出波形的增益约为输入波形的3.24倍,从波特图中我们分析得知加入补偿电路后的系统波特图增益较原系统提高了10 dB左右,与仿真结果吻合。图6(a)输入波形的峰值出现在2.462 ms处,图6(b)中的输出波形峰值出现在2.083 ms处,可以看出输出波形较输入波形相位超前0.379 ms,约17°的相位超前。
4 结束语
当加入补偿控制电路后,整个系统的增益会增大,随之该系统的输入信号,即DVD激光头的聚焦误差信号通过该系统后也会增大,相应的,DVD激光头的线性感测范围也会增大。通过原电路中增加补偿控制电路以弥补原系统的相位滞后,使系统相位超前17°,并提高了系统的增益10 dB,增加了系统的相位裕度,提高了稳定性,并通过此方法提高了DVD激光头的线性检测范围。
[1]李瑞君,钱剑钊,龚伟,等.基于DVD光学读取头的大量程高精度扫描探头[D].合肥工业大学,2011.
[2]陶胜,张珂,张晴.基于DVD光学读取头的测微力计[D].合肥工业大学,2012.
[3]Chih-Liang Chu,Kuang-Chao Fan,Ye-Jing Chen.A compensation method for the hysteresis error of DVD VCM[J].Meas.Sci.Technol.,2004,15:730-740.
[4]Kuang-Chao Fan,Chih-Liang Chu,Jong-I Mou.Development of a low-cost autofocusing probe for profile measurement[J].Meas.Sci.Technol.,2001,12(2001):2137-2146.
[5]黄友锐,曲立国.PID控制器参数整定与实现[M].科学出版社,2010.
[6]Alan V.Oppenhein.信号与系统[M].刘树棠,译.西安交通大学出版社,2007.
[7]王继平.DVD光学读取头关键技术研究[D].华中科技大学,2003.
猜你喜欢
小主人报(2022年18期)2022-11-17
红领巾·成长(2022年6期)2022-07-23
科教导刊·电子版(2022年5期)2022-03-19
小哥白尼(野生动物)(2021年2期)2021-07-16
学生天地(2020年21期)2020-06-01
汽车维护与修理(2019年3期)2019-08-08
测控技术(2018年7期)2018-12-09
汽车维护与修理(2018年5期)2018-09-29
汽车维护与修理(2018年23期)2018-07-03
汽车维护与修理(2017年5期)2017-11-17