基于波形分析的大众汽车网络系统故障诊断*
2015-01-22 05:26魏秋兰代新雷
机电工程 2015年2期
魏秋兰,姚 鑫,代新雷
(陕西交通职业技术学院汽车工程系,陕西西安710018)
0 引言
汽车网络系统应用逐渐广泛,其可靠性要求很高,但由于车辆的振动、潮湿、老化等因素,可能会出现绝缘故障、电缆断路及插头触点等故障;如果网络传输系统有故障,则整个网络系统的有些信息将无法传输,接收这些信息的控制单元将无法正常工作,从而给故障诊断带来困难[1-2]。维修人员利用专用诊断仪及各种解码器不能对具体故障部位或原因完全做出判断,采用读数据流的方法又很难判断快速变化的数据。示波仪可将电信号转化为光信号显示在屏幕上,能够直观地反映元件的工作情况[3]。利用波形分析法诊断故障已被广泛采用,李勇等人[4]利用示波仪采集了网络系统各种故障波形并做了说明,但是对故障波形产生机理解释较少,使得在实际维修工作中仍然存在很多疑惑,网络传输系统故障诊断会由于检测点选取不当而造成捕捉到波形失真,这样对故障诊断结果有很大程度的影响,在CAN线断路故障时尤为明显,因此研究者需要通过分析故障波形产生机理说明测量点选取的重要性,为网络系统的检测维修工作提供指导。
本研究将采用波形分析法,利用大众专用示波仪和诊断仪捕捉网络传输系统故障波形,对故障波形产生机理进行分析,对比不同位置检测到的波形,以得到检测位置对波形捕捉的影响,通过试验对检测位置对CAN线波形的影响进行验证,并在实际故障检测中得到进一步验证。
1 网络系统故障诊断思路
1.1 诊断思路
网络系统故障一般有电源系统引起的故障、节点故障和线路故障[5];通信线路的故障形式主要有CAN线短路、CAN线断路、CAN高低线短路、CAN线以及线路物理性质引起的通讯信号衰减或失真,这些都会引起控制单元无法工作或电控系统错误动作[6]。控制单元的正常工作电压一般在10.5 V~14.5 V范围内,如果提供的电压低于该值就会造成一些对工作电压要求高的控制单元出现停止工作,从而使整个网络系统无法通信。所以诊断前应先保证电源供电正常,再使用专用诊断仪或解码器对整个电控系统进行故障诊断,若诊断结果为控制单元通讯故障、失去通讯、通讯总线故障时,一定要弄清控制单元之间的通信关系,选取合适的检测点测量信息传输线路波形,最后查明故障原因。
1.2 标准波形描述
大众汽车采用了多种CAN 数据总线来进行控制单元之间信息交换,大众汽车2000年以后生产的车型,动力CAN 数据总线传输速率为500 kbit/s,舒适CAN 和信息娱乐CAN 数据传输速率均为100 kbit/s。在CAN 线上信息传递是通过两个二进制逻辑状态0(显性)和1(隐性)来实现的,每个逻辑状态都对应于相应的电压值。控制单元利用两条线上的电压差来确认数据。动力CAN的标准波形如图1所示,其CAN高线电压变化为2.5 V~3.5 V 之间,CAN 低线电压变化为1.5 V~2.5 V之间。舒适CAN正确的波形,高线电压变化为0~4 V之间,CAN低线电压变化为1 V~5 V之间。
2 试验测量
2.1 试验装置连接
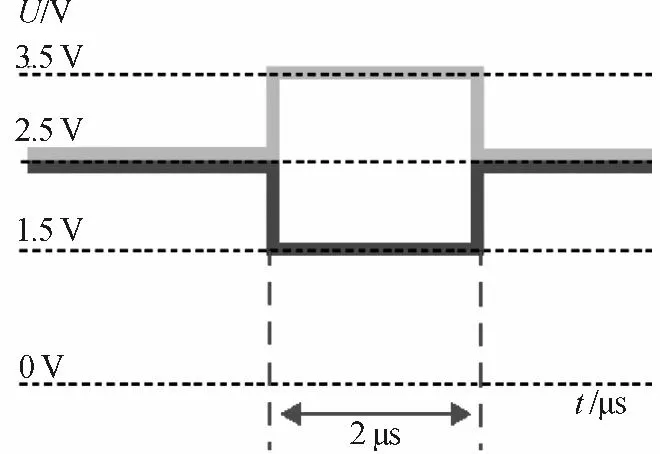
图1 动力CAN的标准波形
笔者以大众帕萨特车型作为试验车辆,使用示波仪VAS6356 与诊断仪VAS6150 对该车的动力CAN 进行波形测试,并模拟多种故障波形。示波仪通道DSO1 的红色测量端子(正极)接CAN 高线测量点A,通道DSO2 的红色测量端子接CAN 低线测量点B,且二者的黑色测量端子同时接地,连接线路示意图如图2所示。系统在同一界面下显示CAN 高线和CAN 低线的同步波形,能直观分析故障。
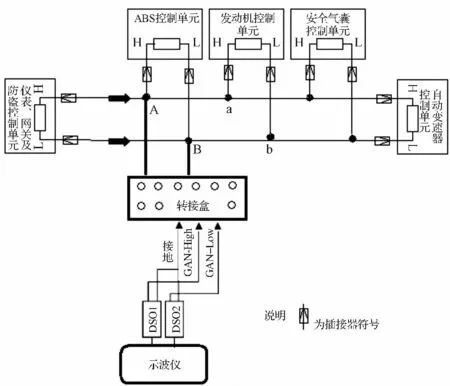
图2 示波仪测量动力CAN连接线路示意图
2.2 试验结果与分析
2.2.1 CAN线断路波形机理分析
如图2所示,本研究将断路故障设置在ABS 控制单元的高线与检测点A之间,并在A点进行测量,得到的波形如图3所示。ABS控制单元在发送信息时波形如图3 中的分界线前面部分,此时检测点A 电压为低线电压经过发动机控制单元、安全气囊控制单元及自动变速器控制单元终端电阻分压后的电压,高线波形与低线波形变化趋势相同,但振幅有所下降,由于CAN线以差动放大器来评估CAN线的输入信号,另外3个控制单元无法识别ABS 控制单元发送的信息。而在ABS控制单元接收其他控制单元的信息时检测点A能测量到如图3 中的分界线后面部分波形,而且其余控制单元的信号能够正确传递,波形显示正常,但是由于线路断开ABS该控制单元接收不到信息,断路故障对驱动CAN影响较大,在此种情况下动力CAN不能正常工作,表现为某个控制单元不在网络上的故障代码[7]。
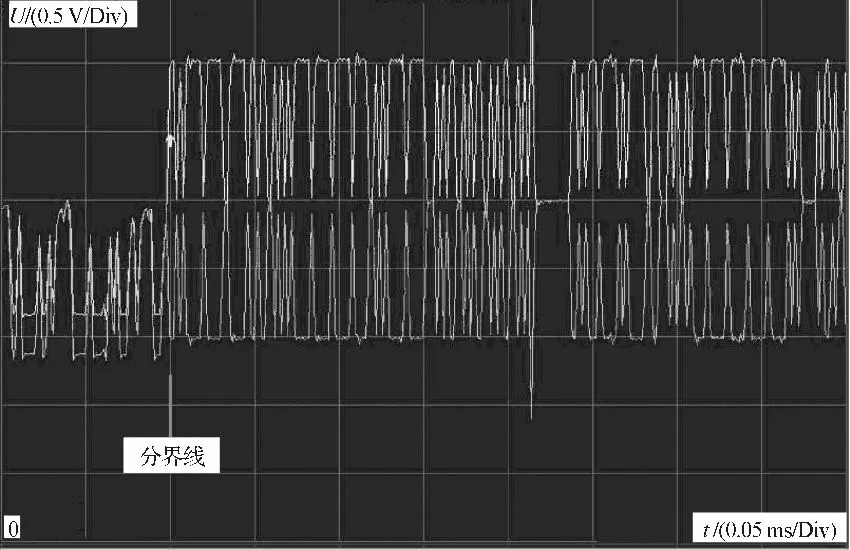
图3 A点测量动力CAN高线断路波形
在相同故障情况下,若将测量点选取在图2中的a点,得到的波形如图4所示,波形呈镜像传递,显示正常。虽然ABS控制单元的高线发生断路,但是发动机控制单元、变速器控制单元、安全气囊控制单元及仪表控制单元(内含网关与防盗控制单元)之间能够正常通信。
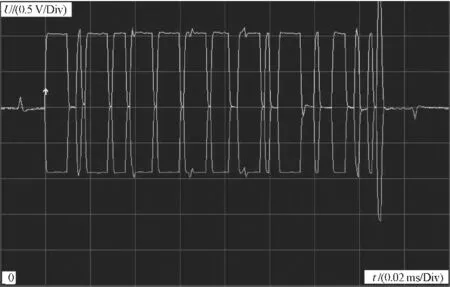
图4 a点测量动力CAN高线断路波形
由此可以看出,断路故障波形信号还取决于检测点,如果将检测点选取在离断路较远的位置测量,CAN线上虽然没有已断开控制单元的发送数据信号,但是示波仪仍会捕捉到正常波形信号,这些信息则是其余控制单元相互通信的信号,此种情况在示波仪解析率较低时将无法识别出各信息的比特从而造成误判。所以笔者在利用示波仪测量前用诊断仪诊断出哪些控制单元不通讯,不通讯的控制单元之间有何联系,再选取合适的测量点。
根据上述诊断思路,在大众帕萨特车型无法起动故障排除中,本研究通过故障诊断仪VAS6150读到发动机控制单元存在两个故障码含义分别为动力系统数据总线无法通讯和发动机控制单元闭锁,再从网关中读到故障码含义为动力系统数据总线有故障或有缺陷。其他控制单元无故障记忆,根据故障码分析,该故障属于CAN 总线系统通信线路故障,由于启动时,发动机控制单元要与防盗控制单元、变速器控制单元相互通信,又因为该车型的防盗控制单元集成在仪表控制单元内,本研究将检测位置重点选取在仪表控制单元的CAN线处,得到波形如图3中分界线之前波形,表明此处高线断路。通过仔细检查连接线束,发现从仪表控制单元出来的插接器中CAN 高线端子触点回退。笔者用线束修理工具修理好该插接器,清除所有控制单元的存储的故障代码,故障码不再出现,故障排除,发动机也能够正常起动。
舒适系统控制单元当某节点的CAN高线断路时,波形图如图5所示。仅断路节点的CAN 高线无传输数据波形,高线为0 V隐性电压,CAN低线传输数据波形正常,控制单元仅通过低线对地的电压值确定传输数据,其余节点CAN线传输正常标准的对称互补数据波形,系统进入单线传输模式[8]。舒适系统CAN数据总线引入独立驱动器(输出放大器)彼此没有通过电阻器相互连接,从而消除了两种CAN 信号的相互依赖,因此舒适系统CAN 高线和CAN 低线不再相互影响,独立运作。
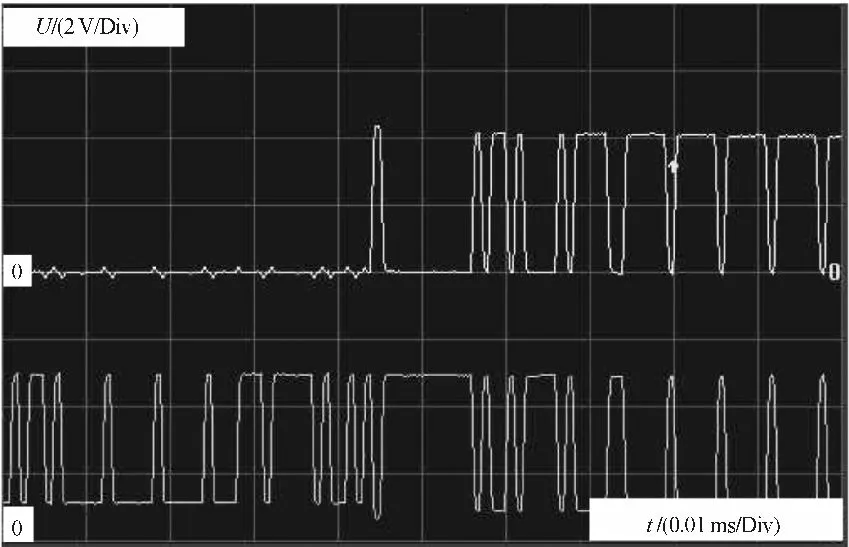
图5 舒适CAN高线断路
在试验中发现,如果存在断路故障,则一个数据导线断路时,系统不会与所有控制单元一起切换到单线运行模式,只有直接连接在已断路数据导线上的控制单元才无法再将信息传输到CAN 线上。收发器识别到一根数据传输导线缺失,因此在相应的测量值块中显示“单线运行模式”。对于其余的控制单元来说,在断路情况下可以不受干扰地传输数据。其余控制元件则表明有一个与总线相关的故障记录,该记录不断在“单线”与“双线”之间切换。在波形检测时测量位置尽可能选在存在该故障记录的控制单元CAN线之间。
2.2.2 CAN单线短路波形机理分析
当动力CAN高线对正极短路时,则在高线上任意一个检测点测量到的波形均为电源电压(约12 V),在测量点B 测得低线电压为高线12 V 电压经过动力系统所有控制单元终端电阻并联后总电阻分压后所得的电压,所以波形为低于12 V 的一条直线。同理,CAN高线任意处对地短路,则高线电压为0 V直线;动力CAN 低线电压是高线0 V 电压经过动力系统所有控制单元终端电阻并联后总电阻分压后的电压,所以波形为高于0 V的一条直线。在此种情况下动力CAN系统无法确认信息,因此均无法正常工作。
当舒适CAN高线对地短路时,高线电压置于0 V,低线电压正常,舒适CAN 高线对正极短路,高线电压为12 V 或蓄电池电压,CAN 低线的电压正常,该类故障舒适CAN均为单线运行,所有连接在此的控制单元都与这个故障相关。如果调用相关控制单元内的故障码存储器,则可以读取到故障记录“舒适系统数据总线处于单线运行模式”和“短路”。无论故障部位在何处,在网络内所有位置都可以发现这种故障形式。
2.2.3 CAN高低线短路和高低线交叉波形机理分析
动力CAN高线与CAN低线短路时,测量点A与B的电压均被置于隐性电压值(约为2.5 V),在实际检测中,可以通过拔取驱动CAN总线上的控制单元判断是由于控制单元引起的短路还是由于CAN 高线或CAN低线线路连接引起的短路。当存在故障线被取下后,波形恢复正常,说明是被拔下的导线存在短路故障。
舒适CAN 高、低线之间短路,两线电压波形均为高线电压波形,低线电压自动切断,此时控制单元仅通过高线线路对地的电压值确定传输数据。此时研究者用万用表测量电压应接近高线电压等。这时舒适系统CAN上的所有控制单元都发生这种情况,所以该故障以记录“无法到达控制单元×××”的形式存储在诊断网关故障码存储器内。
动力CAN高低线交叉时低线传递高线波形,高线传递低线波形,检测到的波形颜色调换。这时重点需检查插接端子和CAN 线是否对换。舒适CAN 高低线交叉后,两线互换传递波形。未经过培训的人员或修理工维修导线束或加装系统时,容易产生该故障,应多和客户沟通。
2.2.4 CAN线带电阻波形机理分析
动力CAN 线路带电阻时,波形振幅减小,而且电阻越大,振幅越小。控制单元内差动放大器无法评估CAN线的输入信号,所以系统无法正常工作。这时需注意检查连接CAN 线的插接器是否松动。与2.2.1节所述相似,若测量点选取较远,示波仪解析率低的情况下动力CAN线带阻故障波形将不易察觉。
舒适CAN 高线带阻,高线波形振幅减小,而且电阻越大,振幅越小,高线带阻系统也会自动切换为单线运行模式,工作人员在检查时要注意各连接端子是否松动,针脚是否有氧化造成接触电阻。
3 结束语
笔者分析研究了大众汽车网络系统通信线路的部分故障波形产生机理。研究结果表明,动力CAN线的断路故障和带阻故障表现为动力系统部分控制单元之间无法通讯,且检测位置对波形有一定影响;而短路故障会引起动力系统所有控制单元无法通讯,位置对波形无影响。舒适CAN线的单线短路、单线断路和单线带阻故障系统均切换为单线运行,但舒适CAN双线交叉、双线间短路故障会引起线上的控制单元无法通讯。
波形分析法能够形象、直观地反映故障症状与故障原因间的因果关系,为在设计、维护和维修汽车网络系统提供了良好的依据,有利于进一步提高汽车网络系统工作的可靠性与安全性水平。同时,示波仪可以与故障诊断仪结合起来,进行更有效地故障诊断。
(References):
[1]廖向阳.车载网络系统检修[M].2 版.北京:人民交通出版社,2011.
[2]QU Li-rong,HE Dan-ya.The research and development of automotive engine test platform[J].Advanced Materials Research,2012(433):595-599.
[3]DING Zai-ming,LIU Jin-feng.Study and design of check⁃ing and testing car for whole circuit[J].Applied Mechan⁃ics and Materials,2014(575):554-557.
[4]李 勇.汽车单片机与车载网络技术[M].北京:电子工业出版社,2011.
[5]赵 春,孙志刚.应用波形分析法检测汽车CAN-BUS 故障[J].拖拉机与农用运输车,2008(4):120-122.
[6]侯 勇,周克媛.基于大众汽车的CAN-BUS 总线控制系统的故障诊断方法[J].北京工业职业技术学院学报,2014(2):15-19.
[7]刘 威,谭小锋.汽车CAN 系统故障原理及波形分析[J].北京劳动保障职业学院学报,2013(2):50-54.
[8]徐 闯,邓忠华.基于CANopen 的套色系统主站的实现[J].轻工机械,2014,32(1):54-57.
[9]兰文奎,江 洪.基于波形分析法的CAN-BUS 系统故障诊断研究[J].农业装备与车辆工程,2010(7):57-59.
猜你喜欢
建材发展导向(2021年16期)2021-10-12
中学课程辅导·教学研究(2018年3期)2018-06-15
中等数学(2017年1期)2017-06-01
中国核电(2017年1期)2017-05-17
上海金属(2016年2期)2016-11-23
山东冶金(2015年5期)2015-12-10
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年5期)2015-04-09
河南科技(2014年16期)2014-02-27
河南科技(2014年12期)2014-02-27