
基于ArduAo单片机的步进电机控制设计
2015-01-22 11:33李世贤信丽华于奉天
产业与科技论坛 2015年13期
□ 李世贤 信丽华 于奉天
一、引言
ArduAo是一种易于上手、操作灵活的开源电子原型平台,其采用价格低廉的处理器,可直接USB供电,其编程语言是基于C语言开发的一种易于无编程语言基础的学者掌握的语言。步进电机是根据脉冲信号运动的动力装置,其控制方便、价格低廉、方便控制的优点使其在家用电器、工厂自动化中广泛采用。现有的步进电机控制机构结构复杂,非专业人员难以掌握。将ArduAo的优点充分与步进电机结合,可以组成价格低廉,易于非专业人员控制的步进电机控制机构。本文就是基于ArduAo设计的通过计算机控制并显示转速的一款控制机构。
二、ArduAo简介
单片机是把微型计算机的主要原件集成在一块相对计算机小很多的芯片上的微型计算机。由于单片机的集成设计,精简了结构,信号传输的路径缩短,使其运行速度和可靠性很高。ArduAo包含两部分,一部分是用于编程的ArduAo IDE,可以使用其编写控制硬件的驱动程序,然后将其上传到ArduAo的硬件就可以控制单片机控制做要求的指令。另一部分是基于Atmega328单片机的硬件部分。由于ArduAo已经将基本的原件结合在一起,可以使用其直接读取各种传感器的信号,方便不了解电路知识的学者操作。
ArduAo的参数:Digital I/O数字输入/输出端口0-13;Analog I/O模拟输入/输出端口0-5;输入电压 USB接口供电/5~12V外部供电;输出电压 支持3.3~5V DC输出。管脚说明:GND 接地;3.3V、5V 电源输出;0A、1A、2A、3A、4A、5A模拟输入兼数字输入输出端;0至13数字输入输出端。
三、步进电机简介
(一)步进电机原理。一般情况下电机转子为永磁体,当电流通过定子时会产生磁场。定子受到磁力时会旋转一定角度。同时转子也会随着磁场转动。每输入一次信号,电机就旋转一定角度。电机的转速与脉冲频率正相关。绕组的通电顺序决定转向。根据其原理,可以调节信号的频率、长度来调节电机的转速和旋转角度。
(二)步进电机的参数。相数:线圈组对数;拍数:实现磁场周期性变化的脉冲数;步距角:每个脉冲信号所驱动角度;定位转矩:断电时转动电机所需的力矩;静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。
四、硬件电路设计
设计使用的硬件有28BYJ-48步进电机,ArduAo UNO型号的ArduAo硬件,ULN2003A型号步进电机驱动芯片。各个引脚的链接方式如表1。

表1 单片机与驱动模块引脚连接
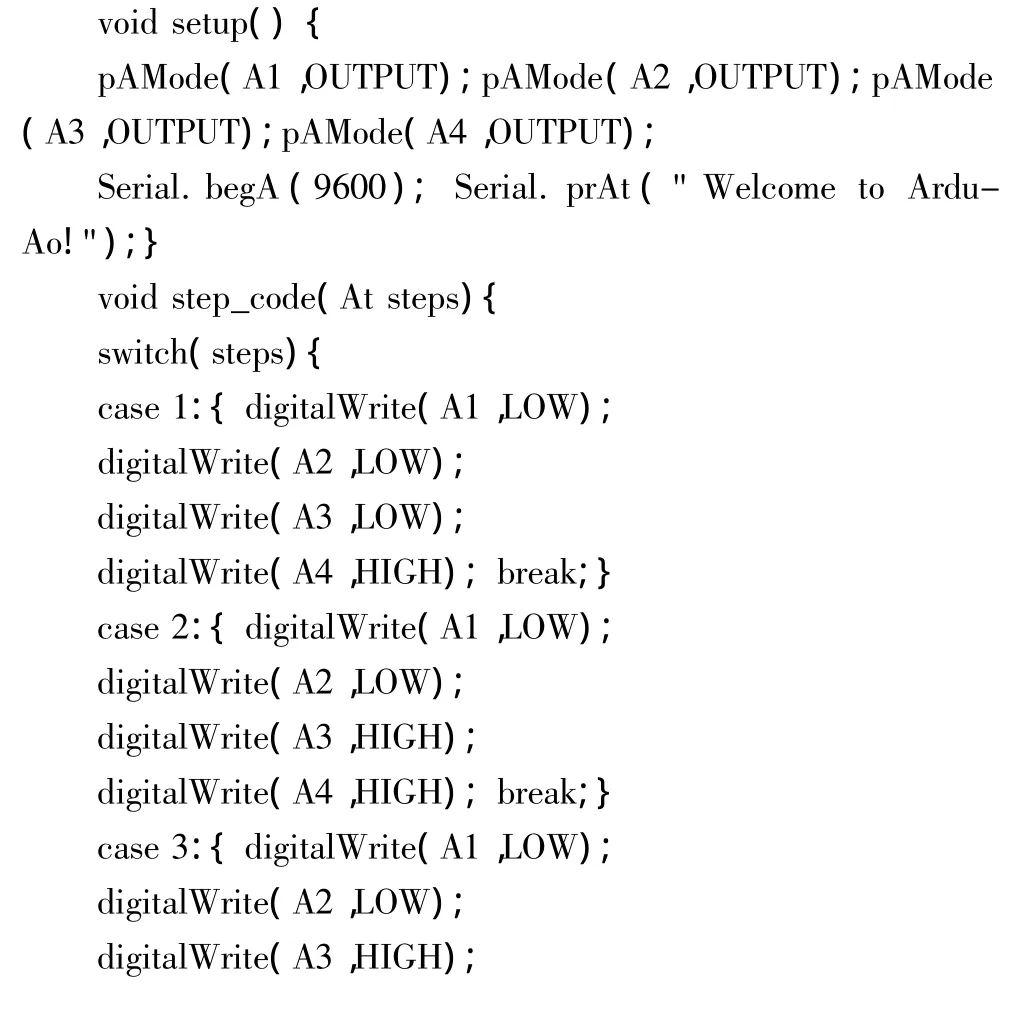
五、软件设计
采用ArduAo IDE软件进行控制语言的编程。首先编写控制引脚输入信号的顺序,采用八拍控制,然后读取计算机输入数值,从而实现对电机的速度控制,最后单片机回馈电机转速,并显示在计算机屏幕上。

六、结语
本文创新点在于在步进电机的额定工作情况下,可以随意调节步进电机的转速,弥补了当前主流控制机构只能有级调速的缺点,本控制机构可以对步进电机进行无级变速控制,还可以实时输出步进电机的角速度。
[1]赵英杰.ArduAo互动设计入门[M].北京:科学出版社,2014
[2]王秀和.永磁电机[M].北京:中国电力出版社,2007
[3]冯江华,陈高华,黄松涛.异步电动机的直接转矩控制[J].电工科学报,1999
[4]黄文凯.ArduAo开发实战指南[M].北京:机械工业出版社,2014
[5](美)Massimo Banzi[M].北京:人民邮电出版社,2012
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
数学物理学报(2022年3期)2022-05-25
防爆电机(2022年2期)2022-04-26
电子制作(2019年13期)2020-01-14
数学物理学报(2019年5期)2019-11-29
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
中成药(2017年12期)2018-01-19
通信电源技术(2016年1期)2016-04-16
