无人机地面站综合检测台设计
2015-01-16 05:26鲁希团田雪涛
电子设计工程 2015年4期
鲁希团,田雪涛,吕 慧
(西安爱生技术集团公司 陕 西 西 安710065)
无人机地面控制站(简称地面站)是整个无人机系统的指挥控制中心,承担着对无人机远程监视与控制任务,是系统中极为关键的一部份。近些年,无人机行业迅速发展,地面站承担的任务越来越多,外部的硬件接口与内部监控软件功能逐渐增多。因此,对地面站检测与调试成为生产阶段不可缺少的一个环节。目前,由于专业设备缺少,很难实现对整个地面站进行独立全面的检测与调试,导致软件与硬件中潜在问题只能在系统联式后期或外场试飞阶段发现,严重影响无人系统工作正常开展,造成了人力与物力上浪费。对此问题,本文提出了无人机地面站综合检测台,能够对地面站各项功能与性能进行检测,尽早的发现问题,减少后期地面站设备的返厂维修。
1 系统构架
系统总体设计强调高度集成性,最大程度地提高系统的综合功能,减少系统的质量和体积,同时考虑实际使用方便,要求系统能够随地面站位置移动。因此,整个系统集成在一个可移动式工作台中,在工作台侧面预留外部检测接口,外形如图1。硬件遵循模块化设计,由CPU模块工业控制计算机和扩展模块组成,系统硬件与测试接口如图2所示。

图1 系统外形及测试接口Fig.1 The structure and test interface of the test bench
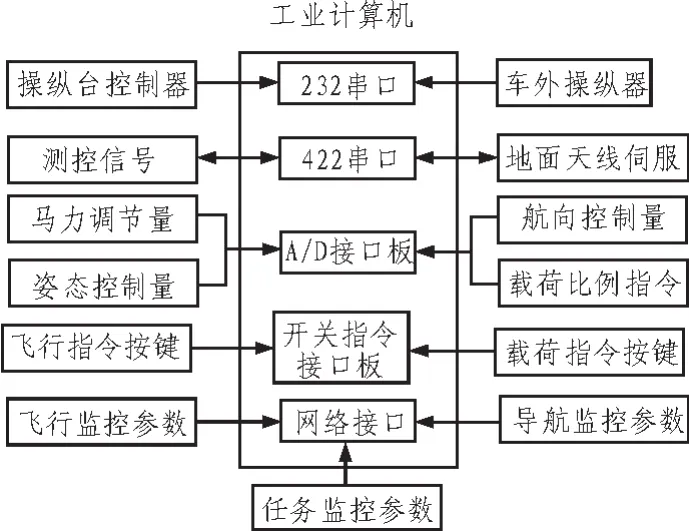
图2 硬件与测试接口Fig.2 Hardware and test interface of the test bench
1)工业控制计算机以CPU模块为核心部件,通过PCI总线板与各模块进行数据交换,实时采集接口的数据。
2)通过RS232串行接口接收操纵台控制器与车外操纵器的发出的遥控数据;
3)通过RS422接收地面站对外发送的遥控数据、地面天线伺服控制数据,并向地面站发送遥测仿真数据、检测台回报数据、地面天线状态仿真数据;
4)通过A/D接口板,将马力控制量、飞机姿态控制量、航向控制量以及任务载荷比例控制量转换为数字量信号;
5)通过开关指令接口接收飞行控制指令、任务控制指令等触发式指令。
6)通过网络接口接收地控制站的导航监控软件、飞行监控软件、任务监控软件发出的各类参数与指令。
2 硬件设计
目前CPU模块系统应用呈现通用化、小型化、多层次的发展趋势,在电子或控制工程领域起重要的角色。随着CPU模块与操作系统和软件兼容性日益提高,使得标准型、通用型CPU模块倍受技术人员青睐[1],为开发PC构架的计算机系统提供了新思路与方法,设计人员仅需开发相应的接口单元,便可满足使用要求。本系统采用德国控创JRexplus-690 CPU模块,具有体积小、扩展性强、低功耗、宽电压供电等特点。RS232串行接口卡与RS422串行接口卡为成熟货架类产品,分别选用MOXA公司的CP114I与CP104I型串口卡,基于 PCI总线,能够保证与CPU模块相互兼容,每类串行接口卡能够同时接收4路串口数据,并具有光电隔离功能,支持远距离通信,板卡自配备软件开发包。
指令按键口(DI/O接口)与模拟口(A/D)为同一块采集卡,工作原理如图3所示。

图3 指令按键与模拟量采集卡原理Fig.3 Principle of the card for collecting command key and analog
该采集模块采用MCU(80C552)为处理器,内置8路8位DC5V的模拟量采集通道,实现与A/D口连接。指令按键动作通过CPLD芯片(EPM240)采集电平变化实现,CPLD通过并口再将数据传输给80C52[2]。80C52通过P2和P3并口与CH 365芯片连接,从而连接到PCI总线,实现与本检测台主系统数据通信。CH365芯片是一种新型实用、低成本、快速、简易的的PCI接口芯片,不需要非常大的硬件驱动,给上层控制软件的优化提供更多的时间,不需要花费大量时间在底层调试上[3]。采集模块中锁存器采用8位D锁存器74HC373,程序存储器为Intel 2864A,数据存储器为80C552片内自带。
3 软件设计
检测软件采用Windows XP为运行环境,采用VC的MFC系统软件开发平台,软件中的动态参数显示画面采用了GDI+开发设计,图形化界面美观、友好。整个软件体系使用层次化框架,模块化结构,如图4所示,该软件共分为4层,整个软件从逻辑上划分为任务应用管理层、各功能检测测试执行层、设备驱动层(API)和硬件设备层(各硬件接口 )4个抽象层,每一层为上层提供服务,同时又是下层的客户,层次之间通过接口和协议进行交互,层内的内容被隐藏起来[4]。
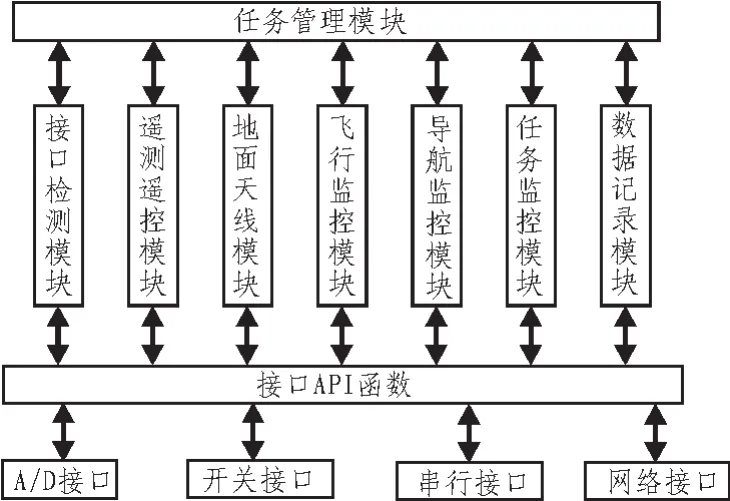
图4 软件构成框架Fig.4 Software architecture of the test bench
对于接口 API函数,RS422、RS232采用MOXA公司的PCOMM组件[5],不需要关心底层通信,仅调用上层的应用函数,就能够实现串口数据的发送与接收,串口数据接收采用10ms定时扫描方式。网络通信采用系统自带的CSocket类,采用TCP与UDP两种通信协议。A/D以及开关量接口采用PCI总线协议,通过配置KPeiConfiguration类寄存器,建立DMA_DEVICE对象,以DMA传输模式与CPU通信,A/D以中断方式采集数据,对于开关量,通过逐行扫面8行8列矩阵线上电平变化,来判断外部开关或按键动作。
接口检测模块主要针对硬件接口进行检测,采用的是外部数据与检测结果对比分析方法判断各类接口模块工作状态。
遥测遥控模块、地面天线模块针对地面站整体性能进行检测,主要通过串行接口与地面站进行数据交互,在这两类模块中分别嵌入了飞行仿真模块与数据链管理模块,向地面站提供遥测数据与地面天线伺服状态数据,并实时接收地面站发出的遥控数据与伺服控制指令。飞行仿真模块主要包含无人机滚转、俯仰、飞行航向、高度、发动机转速与各缸的温度、油量、风门、GPS数据、导航等方面模拟功能[6]。数据链管理模块包含机载与地面的定向天线、全向天线的信号跟踪、GPS数字引导等仿真功能。
飞行监控模块、任务监控模块与导航监控模块针对地面站内部单个软件进行功能性检测[7],根据地面站内部通信特点,此三类模块部分别通过网络与地面站相关软件实现数据交互[8],检测软件接收到相应数据后,根据数据帧结构及格式,显示指令代码与参数,供检测人员直观的判断。
数据记录模块通过VC中的CFile类将检测数据以十六进制写入硬盘,并通过80 ms定时方式,以TCP/IP协议向地面站回传检测数据。任务管理模块承担着各模块的初始化,相互协调、优先级配置、数据采集等功能,并为本软件的提供人机接口,进行参数动态图形化显示,如图5所示,主要有飞行姿态显示、航向显示、发动机状态、高度与速度等参数显示。

图5 检测软件人机界面Fig.5 Interface of the test software
4 结论
本检测台已开始在某型无人机地面站生产与调试阶段使用,使用结果表明,检测台具有以下优点:
1)能够对地面站硬件接口以及导航监控软件、飞行监控软件、任务监控软件各项功能与参数进行检测;
2)采用可移动式控制台,能够随地面站的位置灵活移动,在地面站的检测与售后维修工作中,给操作人员带来很大方便;
3)检测台软件中嵌入了飞行仿真模块,有助于操纵手进行飞行训练、深入了解无人机系统工作原理;
4)软件遵循模块化设计,并在协议中预留相关接口,在一定时期内,能够满足系统升级。
目前用户要求该设备随无人机系统配套,部分设备已经交付,随着地面站系统复杂化的发展,本检测台在地面站生产阶段或售后维修中将是不可缺少设备。
[1]耿通奋.无人机实时飞行仿真平台设计[J].南京航空航天大学学报,2009,41(z1):34-37.GENG Tong-fen.Real-time simulation system for UAV[J].Journal of Nanjing University of Aeronautics&Astronautics,2009,41(z1):34-37.
[2]郑采君.基于CPLD的矩阵键盘扫描模块设计[J].电子设计工程,2010,18(10):169-174.ZHENG Cai-jun.Design of matrix keyboard scanning module based on CPLD[J].Electronic Design Engineering,2010,18(10):169-174.
[3]余林,张厚武,姚凯学.基于FPGA和单片机的PCI数据采集卡[J].仪表技术与传感器,2011(12):108-110.YU Lin,ZHANG Hou-wu Yao,Kai-xue.Design of PCI data acquisition card based on FPGA and microcontroller[J].Instrument Technique and Sensor,2011(12):108-110.
[4]路蔼梅,李新军,何进,等.一种无人机通用综合检测系统[J].北京航空航天大学学报,2006,32(1):27-30.LU Ai-mei,LI Xin-jun,HE Jin,et al.General integrative test system Of unmanned aeriaI vehicle[J].Beijing University of Aeronautics and Astronatics,2006,32(1):27-30.
[5]王晓伟,陈亮,程龙.通过串口通信实现网间数据传送[J].中国新信,2013(23):121.WANG Xiao-wei,CHEN Lang,CHENG Long.Network Data transmission based on serial communication[J].China New Telecommunications,2013(23):121.
[6]云超,李小民,郑宗贵,等.飞行操作任务的无人机模拟训练及系统设计[J].火力与指挥控制,2013,38(8):121-126.YUN Cha,LI Xiao-min,ZHENG Zong-gui,et al.Technology researching of training and system design for UAV simulator based on flying operate task[J].Fire Control&Command Control,2013,38(8):121-126.
[7]沈传兵,白文浩,崔海,等.动力系统试验工艺参数监视系统设计[J].火箭推进,2014(4):73-76.SHEN Chuan-bing,BAI Wen-hao,CUI Hai,et al.Design of process parameter monitoring system for rocket propulsion system test[J].Journal of Rocket Propulsion,2014(4):73-76.
[8]何志勇,宋少伟,邓长华,等.瞬态时域数据合成冲击响应谱算法研究[J].火箭推进,2013(5):55-59.HE Zhi-yong,SONG Shao-wei ,DENG Chang-hua,et al.Research on transient time-domain data synthesis of shock response spectrum[J].Journal of Rocket Propulsion,2013(5):55-59.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
疯狂英语·新读写(2021年10期)2021-12-07
英语文摘(2021年10期)2021-11-22
新世纪智能(英语备考)(2019年4期)2019-06-26
铁道通信信号(2019年11期)2019-05-21
摄影之友(影像视觉)(2019年3期)2019-03-30
CHIP新电脑(2015年10期)2015-10-15
中国当代医药(2015年17期)2015-03-01
汽车与新动力(2012年1期)2012-03-25