虚拟仿真在高职工业机器人教学中的应用研究
2015-01-13 01:35:38仇高贺
新课程研究 2015年32期
◆仇高贺
虚拟仿真在高职工业机器人教学中的应用研究
◆仇高贺
机器人技术是工业4.0中关键技术之一,如何培养高职学生快速掌握工业机器人技术成为高职机电专业的首要任务。本文阐述虚拟仿真教学的必要性,介绍虚拟仿真教学的主要内容,通过虚拟仿真技术建立机器人工作虚拟场景,实现机器人工作路径规划等工作,通过虚实结合的演练,让学生掌握工业机器人技术,取得了很好教学效果。
工业机器人;高职教育
自2013年起,中国市场工业机器人销量超过日本,成为全球第一大工业机器人市场。但在机器人使用密度上,中国仍然远低于全球平均水平。中国努力实现从制造大国向制造业强国转变,2015年国务院制定颁布了 《中国制造发展纲要》,明确提出将机器人作为优先发展目标,如何培养符合工业4.0要求的技术性人才成为高职培养工业机器人专业的首要任务,而目前高职工业机器人教学中普遍存在资源不足的情况,如何在这种情况下培养工业机器人应用型人才,笔者认为虚拟仿真技术是一项可行性方案。
一、虚拟仿真教学的必要性
1.建立资源节约型社会的需求
工业机器人应用范围很广泛,如焊接、码垛、搬运、油漆等工作, 再加上工业机器人种类众多,包括世界四大工业机器人KUKA、ABB、FANUC、YASNAC的操作与使用上往往也存在许多差异。由于工业机器人系统造价昂贵,将所有种类机器人和应用环境都配齐显然是不现实的事情,也与国家建设节约型社会本意背道而驰。
2.人才培养的需求
由于真实的实训场地和设备数量的制约,实验和实训只能分批次进行,限制了学生实际动手操作的机会,造成学生课程结束后普遍感觉还没有掌握相关知识,加上部分高职学生学习能力较差,知识迁移能力弱,如果没有对不同类型机器人和工作场景的实操,他们毕业后遇到与学校不同的机器人和工作场景就会不知所措。因此工业机器人的培训必须跟上就业市场的变化,否则毕业生恐难找到合适工作,难以适应自动化和智能化的工作,而虚拟仿真教学是工业机器人培养方案实现和验证的最佳途径,能够减少项目培训时间,降低项目培训成本,可以反复模拟,及时纠正学生错误,以及控制技术风险等诸多优势。
3.参加技能大赛的需求
工业机器人是典型的机电一体化设备,目前全国高职系统机电相关的职业技能大赛中越来越多地加入了工业机器人应用的部分,而每个举办学校的机器人种类和应用环境有所区别,虚拟仿真技术除了可以满足实验实训教学需求外,还可针对各类技能大赛不同应用的要求,自行建模,无须购买实际设备,提高了学生学习工业机器人技术和参加技能大赛的兴趣。
4.保护学生安全的需要
机器人教学实训内容需要配备相对应的实验实训对象,如气动装置、传送带、焊机等,在实验实训过程中不但有设备的损耗,工业机器人在运行过程中的一些误操作易造成学生人身伤害,为保护学生人身安全,通过虚拟仿真教学既可以解决安全问题,又可以增加学生练习的机会。
正因如此,目前世界主要的工业机器人生产商都会提供离线编程与仿真工具,以帮助用户在个人电脑上进行机器人自动化方案的开发及验证。同时,这些平台也往往会开放相应的软件接口(API),以支持开发功能性插件,从而使平台也能针对不同工业应用场景做虚拟仿真优化训练。
二、虚拟仿真在教学中的应用
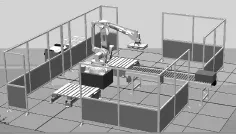
图1 工业机器人虚拟工作场景建立
虚拟仿真技术就是建立与工业机器人真实工作场景类似的虚拟环境,在工业机器人实训教学项目中采用项目式教学法进行设计,其主要的内容和流程如下:
1.建立机器人应用的虚拟环境
学生可以使用集成软件来建立虚拟工作环境,如ABB公司RobotStudio软件建立工业机器人虚拟仿真工作环境,如建立码垛工业机器人工作场景(如图1所示)。也可以使用通用三维建模软件如solidworks、UG、Pro/E等软件建立工业机器人的虚拟工作场景,这样既可以演练学生的三维建模的能力,又可以进行工业机器人操作项目的实训。
2.建立机器人虚拟通讯
以Solidworks建立虚拟通讯为例,学生通过Solidworks建立虚拟工作场景后,通过软件插件MELFA-Works建立与三菱工业机器人的通信协议,通过与RT-Toolbox2和GX-works进行联合仿真,需要建立两者的通讯链接,让学生理解三菱Q系列PLC通信协议,主PLC如何协调控制其他PLC,实现多个机器人的协调操作,虚拟仿真设定通讯链接演练有助于促使学生理解工业机器人通信协议和建立通讯的方法,并将PLC相关的知识点融入其中,提升了学生的知识综合应用能力。由于机器人操作本身带有一定危险性,特别是焊接机器人实际操作,通过虚实结合,在虚拟仿真环境中先上学生理解原理和方法,然后再在真实环境中演练,可以减少发生意外事故的频率。建立联合仿真通信协议过程(如图2所示)。

图2 通信协议建立过程图

图3 机器人虚拟示教过程
3.机器人虚拟路径规划
以码垛机器人虚拟仿真为例,机器人要实现 “抓起上升→旋转到垛盘上→下降放到垛盘上”等一系列步骤。机器人动作路线为:上升过程从工作空间的最低点到最高点→回转台旋转90°→下降过程从工作空间最高点到最低点。机器人路径规划目的是寻求机器人最佳工作路径,其中最重要的是保证机器人运动不会发生干涉和避免与障碍物发生碰撞,一般高职学生思维不是很严密,喜欢 “大胆”动手蛮干,如果没有虚拟仿真往往会造教学事故,轻则机器人损坏,重则会伤及学生。所以,必须先让学生在虚拟环境中学会如何进行路径规划,机器人示教,机器人虚拟示教(如图3所示)。虚拟环境中学生很容易理解机器人基于关节坐标和直角坐标的轨迹规划目的和方法,并通过Solidworks软件进行码垛轨迹规划的运动学仿真与分析,从虚拟软件很容易看到机器人规矩路线,可以直观地观察机器人工作姿态和运动轨迹,得到机器人运动性能的实时状况,学生可以准确判定机器人运动方案的合理性及轨迹规划及控制算法的可行性,有效地提高了工业机器人的教学的质量。
4.虚拟仿真过程中故障排除演练
虚拟仿真在工业机器人应用的另一个好处就是可以人为设定一定故障,让学生通过排除这些故障点,更加深入理解工业机器人系统运行原理。每种故障报警方式对应一个数据对象,当变量超出了限定值时,故障报警装置就会发出声响,只有学生排除了故障,变量恢复到正常范围内时,虚拟报警才会解除,才能恢复到正常工作状态。虚拟故障排除锻炼了学生调试设备的能力和逻辑判断能力。
5.虚拟仿真教学阶段过程
在实际仿真教学实践中,笔者认为最好将仿真教学分成四阶段式。首先,讲解工业机器人工作原理及仿真目标,一边讲理论一边通过计算机仿真软件实时展示,边教边练,让学生从空洞的理论教学中解脱出来,给学生一个直观的认识。其次,在虚拟联系过程中,重点让学生演练机器人操作流程及注意事项。再次,学生通过仿真操作、教师要巡回指导,及时发现出现问题,及时排查,否则学生会有挫败感,及时掌握学生学习动态。最后,要让学生分组实际操作,作为鼓励可以让完成仿真模拟的学生直接进入真实的实训环境进行实际操作,这样通过虚实结合,既调动了学生参与仿真模拟的积极性,又将教学目标更好、更快完成。
虚拟仿真技术在工业机器人教学中的应用可以做到交互性、逼真性,让学生能够更好理解工业机器人运动学、软硬件通信协议、传感器技术等相关的教学知识点,使学生沉浸在虚拟现实的环境中,通过虚实结合的教学,达到提高教学效果、减少教学成本、增强教学安全等综合效果。充分发挥虚拟仿真教学的特色,通过虚拟仿真动画、虚拟环境的建设,故障排查等方式,提升工业机器人课程教学效果,让学生尽快掌握相关的知识点,为国家输出符合工业4.0要求的复合型高职人才。
[1]叶晖,管小清.工业机器人实操与应用技巧[M].北京:机械工业出版社,2010.
[2]李晓刚,刘晋浩.码垛机器人的研究与应用现状、问题及对策[J].包装工程,2011,32(2):96-102.
[3]叶修梓,陈超祥.COSMOS高级教程:COSMOS Motion[M].北京:机械工业出版社,2008.
[4]郭晓宁,等.基于SolidWorks的平面连杆机构实体运动分析[J].西安:西安理工大学学报,2001,(4):392-395.
[5]蔡汉明,周铧.工业机器人喷涂运动学仿真研究[J].新技术新工艺,2014,(9):36-38.
(编辑:秦俊嫄)
本文系浙江省教育技术研究规划课题(厅级科研项目)“仿真技术在高职机电一体化专业教学中的应用研究”(编号:JB076)的研究成果。
仇高贺,男,硕士,温州职业技术学院电气电子工程系教师,高级工程师。研究方向:机械制造及自动化。
G712
A
1671-0568(2015)32-0077-02
猜你喜欢
装备制造技术(2020年12期)2020-05-22 09:25:38
黄河之声(2018年5期)2018-05-17 11:30:01
成都信息工程大学学报(2017年5期)2018-01-23 02:45:38
电子制作(2017年8期)2017-06-05 09:36:15
广东石油化工学院学报(2016年6期)2016-05-17 05:17:26
电测与仪表(2016年2期)2016-04-12 00:24:52
信息记录材料(2016年4期)2016-03-11 15:22:54
Coco薇(2015年10期)2015-10-19 12:51:50
机械制造文摘(焊接分册)(2014年6期)2014-03-20 13:57:48
铁路通信信号工程技术(2014年1期)2014-02-28 16:55:19