智能墙面抹灰机的类型及关键技术研究进展
2015-01-09 02:10:59龙腾李恩方灶军赵伟青梁自泽
山东建筑大学学报 2015年1期
龙腾,李恩,方灶军,赵伟青,梁自泽
(中国科学院自动化研究所复杂系统管理与控制国家重点实验室,北京100190)
0 引言
随着社会的飞快发展,许多手工劳动逐渐被机器人所替代。机器人产业的发展,不仅大大解放了劳动力,并且使工作效率得到了很大提升。在如今蓬勃发展的建筑行业中,墙面抹灰这道工序大部分由手工完成,这道工序占据了整个建筑工程总工期的30%~40%,耗费资金多且质量难以达到高标准的要求。墙面抹灰机将有助于节省将近85%的劳动力成本,提高10~15倍的生产力,能在较短的时间内完成作业任务,减少宝贵的时间和项目成本[1-2]。所以,使用机器人代替手工进行高质量的墙面抹灰尤为重要。目前,国内外对抹灰机进行了大量的研究,已经制造出成品并在市场上销售,但是由于功能不完善还达不到满意的抹灰效果,故目前还未能大面积推广[3-4]。文章对智能抹灰机的研究现状和发展过程进行综述,阐述抹灰机的种类,综合分析了抹灰机的关键技术,提出每个技术要点所存在的问题,并提出改进建议。
1 国内外研究现状
目前,国内外的研究中出现了三种样式的抹灰机,分别是喷涂抹灰机、半自动抹灰机和全自动抹灰机。
1.1 喷涂抹灰机
喷涂抹灰机是将已经配置好的灰浆利用输送泵输送到喷头。喷涂装置的设计一般都会增设加压装置,使得喷出的灰浆更加有力,更容易吸附在墙面上,以此来保证喷涂抹灰的质量。
机械喷涂抹灰机在我国应用已经有50年的历史,国外应用的更早。早在1934年,Cormack即发表专利介绍了喷涂抹灰机[5]。他的设计中利用电动机带动螺杆泵,将已经配置好的灰浆压入软管,到达喷头后喷出(如图 1所示)。Mccaughey等和Mccallum也在相同的年代分别设计出不同结构的墙面喷涂抹灰机[6-7]。但在应用初期,机械设备存在着技术性能较差,且易发生故障及寿命较短等缺点,所以一直没有得到广泛的应用。
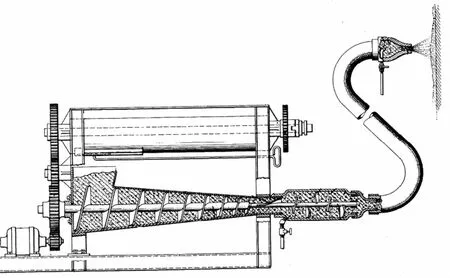
图1 喷涂抹灰机示意图[1]
李永江等设计了一种喷涂抹灰机[8]。设计的喷涂抹灰机将喷枪固定于支架上,通过手工摇动卷筒,使喷枪在钢丝绳的牵引下水平或者竖直运动,相对于手持式喷头,减轻了手臂的劳动强度。通过喷涂抹灰机的应用,使得抹灰的速度有了显著地提高,完成质量也比手工抹灰更加均匀,且节省了材料。
随着技术的革新,喷涂抹灰机的种类逐渐增多,但是喷涂抹灰机在使用过程中,只能完成灰浆的喷涂,刮平这道工序还是需要手工来完成。喷涂抹灰机对喷射灰浆的质量要求高,也是其未能推广应用的原因。用于喷涂抹灰机使用的灰浆,其含沙量严格限制在一定的范围内,但是国内灰浆的配比难以严格保证,所以有的灰浆无法满足喷涂要求。国外的灰浆都是统一配比,而且严格执行,保证了质量。
1.2 半自动抹灰机
半自动抹灰机是在手工抹灰和喷涂抹灰机的基础上进行发展而来。灰浆通过软管或管道输送到抹灰头,通过人工来移动抹灰头位置,抹灰头到达之处,即可将灰浆抹好,达到快速抹灰的目的。
陆龙福等设计了一种半自动抹灰机[9]。抹灰头采用扇叶状螺旋片结构(如图2所示),利用扇叶状螺旋片的斜面具有双向作用力的原理完成作业[10-11]。在抹灰的同时,可完成对墙体的喷浆、压实、抹光等粉刷作业。薛奎设计出不同形状的抹灰头,可以对阴、阳角等部位进行抹灰[12]。但是由于半自动抹灰机的抹灰头面积较小,效率难以得到大幅提高。
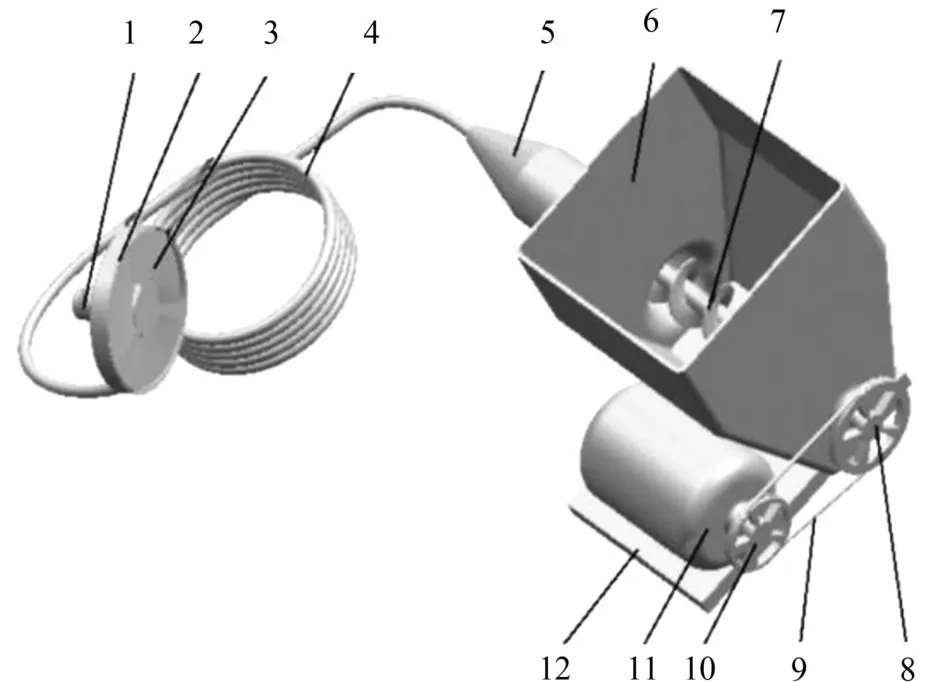
图2 半自动抹灰机的示意图[5]
1.3 全自动抹灰机
目前有很多全自动抹灰机的设计方案。早在20世纪90年代,国内就出现一批关于墙面抹灰机的专利,近年来,抹灰机的设计也没有中断过。墙面抹灰机的设计方案一般包括传动机构、抹灰机构、移动机构等,有的设计中还包括灰浆的传送机构,比如利用传送带、加压泵等机构进行灰浆的传送,免去了人工不断添加灰浆的工序。传动机构负责将抹灰机构提升,使抹灰装置匀速运动上升或者下降;抹灰机构主要是对抹灰的压力和抹灰平整度进行调整,保证抹灰的质量;在一次抹灰完成后,通过移动机构将抹灰机移动到另外一个作业点,便捷省力,大多数设计中移动机构用到的是万向轮。
孙世哲设计了一种自动抹灰机,这种全自动抹灰机增设了翻转抹灰刀(如图3所示),翻转抹灰刀设有大小两个工作面和卧式、立式两种工作位,卧位时与其下方的底层抹灰刀构成阶梯形复合抹灰机构,这种复合抹灰机构,加大了对灰浆对墙面的压力,能有效的防止空鼓开裂的现象[13]。其直立位是用来为墙顶抹灰。
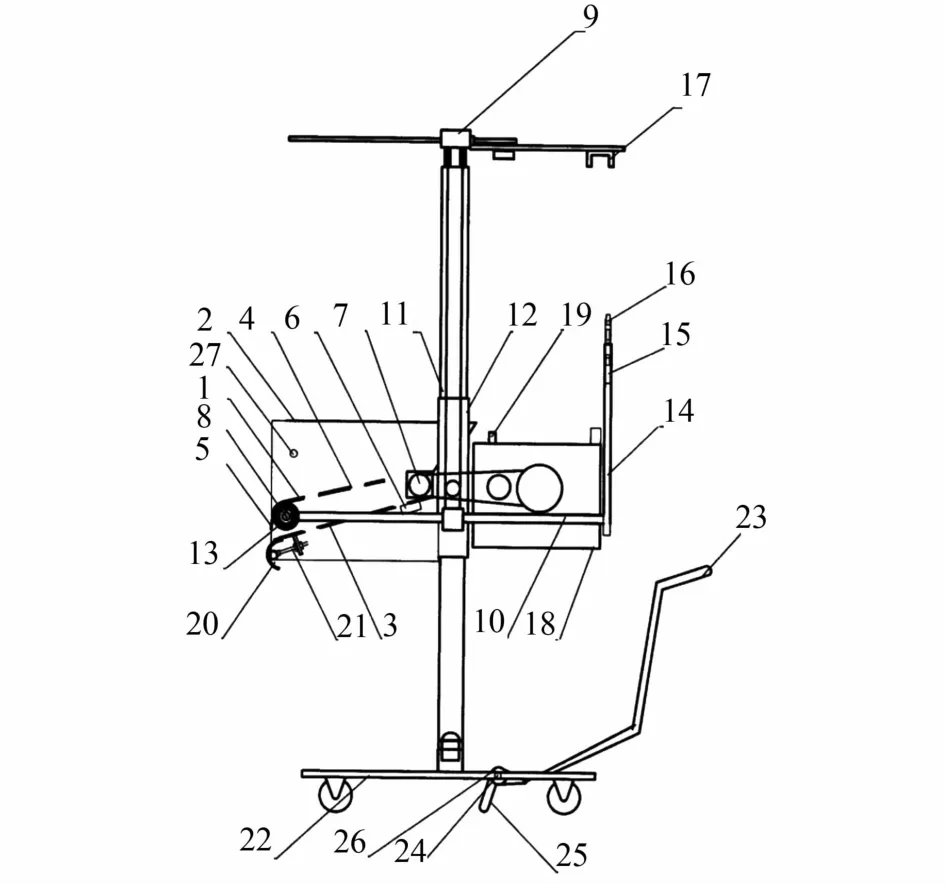
图3 双工作面抹灰机结构设计图[13]
罗永彬等发明了一种建筑用抹灰机[14]。整个机构由抹灰装置和移动装置组成,其中抹灰装置包括灰斗、抹灰板、转动头以及动力装置。移动装置有横向滑轨和纵向滑轨(如图4所示)。抹灰装置可在滑轨上水平、垂直移动,带动抹灰装置完成抹灰作业。此种抹灰机采用独特的齿条升降机构,使得抹灰机在作业过程中更加的稳定,抹灰装置能实现整个墙面的无死角粉刷,并且粉刷的墙面平整无裂缝。但是设计的支架过于庞大,可能导致作业过程中无法保持重心稳定,而且大支架不便于安装和运输。
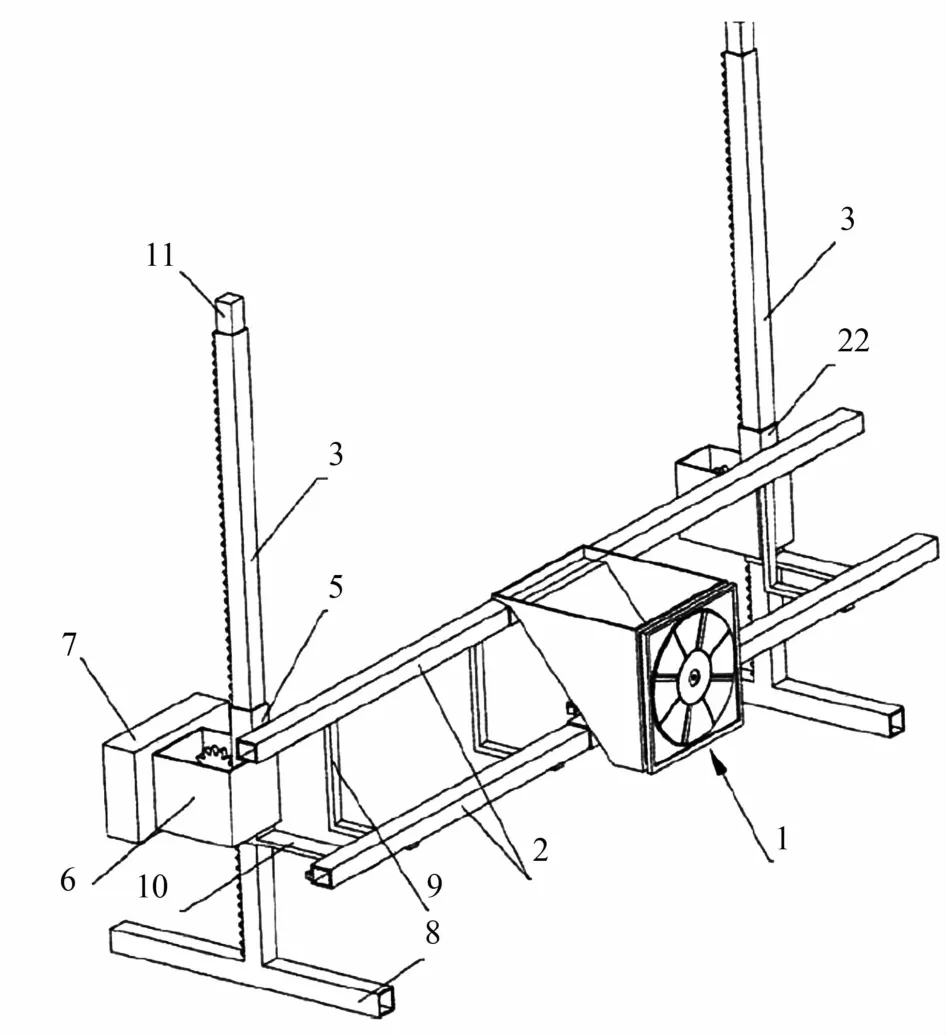
图4 齿轮齿条提升抹灰机结构设计图[14]
沈孝芹等设计了一种墙面抹灰机,张帮振在此基础上进行了改进[15-16]。改进的全自动墙面抹灰机由底盘、支架、刷斗及传动装置组成(如图5所示),这种机械结构设计是通过一个电动机来实现抹灰和提升两种作业[17-18]。由人工将灰浆装入存灰斗中,启动电动机,其带动刷斗沿支架由下往上运动,完成粉刷作业,当到达限位高度时,电机停止后反转,依靠刷斗自身的重力下落到最低处,即完成一次作业。
全自动抹灰机是市场上比较完善的一种抹灰机,它能自动的完成粉刷、抹平等一系列工序,不需要人工参与,有的设计能自动的传送灰浆。对于大面积的抹灰作业,抹灰质量基本上能保证。但是全自动抹灰机还存在一些问题未能解决。首先,在抹灰机构上升过程中,无法保证整个作业部分的粉刷厚度一致,很容易造成下厚上薄的问题;其次,安装测量繁琐,使得作业人员不易接受,在完成一次作业后,需要移动抹灰机并进行支架的垂直度的测量和抹灰机与墙面距离等参数的测量;而且抹灰机目前只针对整面需要抹灰的墙面,遇到有门窗等不需要抹灰的地方仍然需要进行人工抹灰。
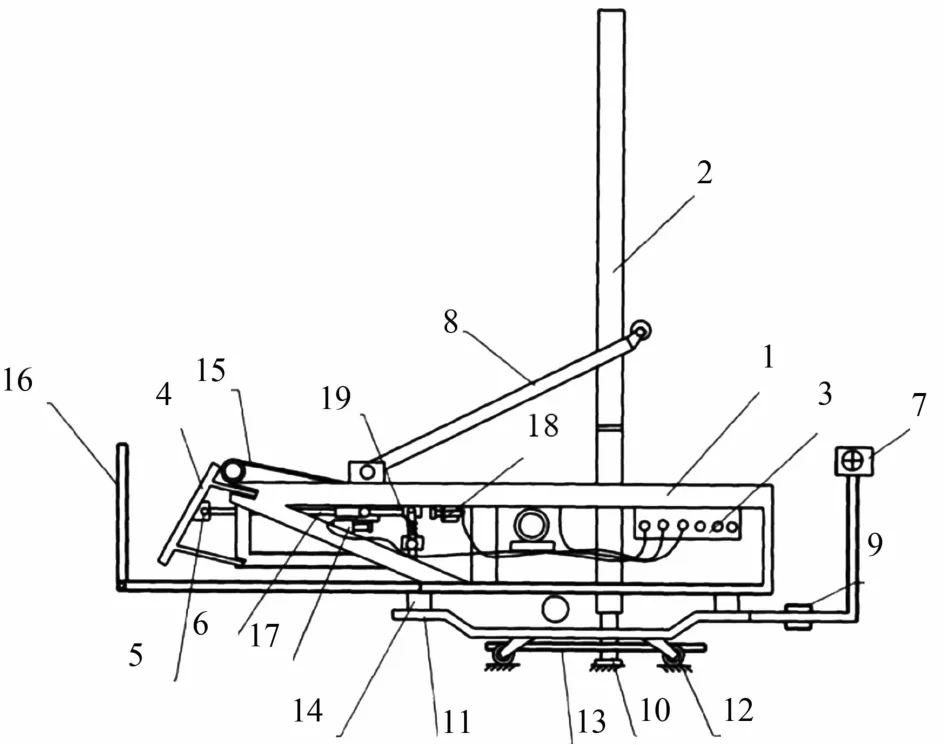
图5 全自动墙面抹灰机结构设计图[16]
2 墙面抹灰机的关键技术研究进展
目前对于智能抹灰机的研究很多,文章从传动机构、支架垂直度、抹灰机与作业墙面之间的距离、抹灰机的粉刷位置以及抹灰板与墙面的偏转角等方面,介绍了墙面抹灰机的关键技术研究进展,并对一些关键技术所存在的问题提出解决方法。
2.1 传动机构
传动机构是抹灰机保证质量的关键机构,它与刷斗上升的稳定性和抹灰的均匀性等因素有密切关系。刘维忠等利用卷扬机进行传动,设计简单平稳,但是在刷斗的往复运动中钢丝绳容易磨损,需要及时做好维护保养工作[17,19-20]。而且在设计卷扬机时,需要对钢丝绳的张力、滚筒强度、卷筒与绳轮的允许偏转角进行精确的计算,留出充足的余量[21-23]。张宏涛的设计中采用传统的蜗杆装置进行升降,由于刷斗质量大,上升过程中易对蜗杆装置发生形变,且需要根据蜗杆装置的规格,限定刷斗的最大质量[24-25]。陈万强等的设计中利用液压传动方式,液压传动相对于其他传动方式来说功率质量比较大,更能提高效率,但是在设计中需要考虑到液压装置在运动时产生的振动问题[10]。由于上述传动机构的平稳性和精度都不高,可以考虑为采用齿轮传动方式进行传动提升,这样的设计可大大提升控制精度[26-27]。由于采用齿轮传动方式,需要在左右两根撑杆上加装齿条,上升过程由电机带动齿轮转动,使抹灰机顺着固定的齿条上升并进行抹灰。采用齿轮传动,最重要的是必须保证齿轮齿条的清洁度,一旦有水泥沙石卡在齿条中,齿轮很有可能脱轨,造成抹灰机从撑杆上坠落,发生安全事故。为了防止事故的发生,可将撑杆改为槽钢或者C型钢材,将齿条固定于内部,做成半封闭模式。另外,还可以在齿轮的周围加上刷子,将齿轮即将到达的位置提前刷干净,保证抹灰机能顺利上升。
2.2 支架的垂直度
利用抹灰机进行墙面粉刷时,支架的垂直度是决定粉刷厚度均匀性的关键因素。目前全自动抹灰机的支架垂直度需要靠人工利用吊垂线的方法来测量,安装抹灰机时就不能完全保证绝对的垂直,而且在刷斗的上升过程中,由于重力的作用,可能导致支架垂直度发生改变,影响施工质量。可以考虑在原有抹灰机上增加支架垂直度的检测装置,监测支架的垂直度,及时在抹灰过程中进行补偿。目前的研究中对支架垂直度检测用到的传感器一般有倾角仪、陀螺仪、加速度传感器,或者利用红外线进行检测等,也可通过间接的方式来获得支架与墙面的夹角[28]。这些垂直度检测方式都可以直接应用,考虑到检测的精度以及传感器的成本,故利用间接的方式来获得支架的垂直度。具体实现是用测距传感器,在抹灰机上升过程中选取在同一竖直线上的两个点,测量抹灰机与粉刷墙面之间的距离,利用三角形计算出撑杆与竖直方向的角度,即可得到支架的垂直度。根据测量到的偏差,由控制器计算丝杆伸缩量大小,并在抹灰机上升抹灰过程中,调节丝杆伸缩,进而进行支架垂直度的补偿。
2.3 抹灰机与作业墙面的距离
抹灰机与作业墙面的距离是保证粉刷厚度的决定性因素,调整这个距离就可以调整灰浆粉刷的厚度。这个距离由两个方面的因素来决定:一是抹灰机的基座与墙角之间的距离;二是刷斗与墙面的距离。目前在抹灰机的使用中,这些距离主要靠人工测量,有的更是单纯依赖目测。要解决这个问题,就需要通过传感器检测抹灰机与墙面之间的距离。目前可以应用在抹灰机上的有光电测距和超声波测距,通过测量反馈控制等方式,保证抹灰机与作业墙面的距离保持恒定[29]。改进的设计中可以在基座加装初定位装置,保证基座与墙角的距离,再利用测距传感器精确测量灰斗与墙面的距离,根据测量偏差进行微调。考虑到抹灰机工作环境充满灰尘以及振动,选用的传感器必须有良好的抗干扰性能。Amann在2001年提出了激光测距的方法,用到的激光测距传感器抗干扰性能良好,可应用于墙面抹灰机的距离测量[30]。
2.4 抹灰机粉刷位置
目前抹灰机对大面积的粉刷墙面能应对自如,但是对于墙角以及出现有门窗的位置是无法使用抹灰机进行抹灰。在作业过程中,这些位置还是需要人工抹灰,甚至于还要搭脚手架,这极大的限制了抹灰机效率的提高。另外,对于墙顶的抹灰,一般抹灰机也无法完成,主要原因在于灰浆的输送以及抹灰板对天花板的压力无法解决。目前可以结合喷涂抹灰机和全自动抹灰机的优点,在现有全自动抹灰机的基础上加上喷涂抹灰头,在抹灰板不能达到的位置直接进行喷涂抹灰。再进一步的改进可以为抹灰头增加伸缩关节,使抹灰头自主移动,最终实现抹灰头在待刷墙面自动规划路径,智能的完成待刷墙面的抹灰工作[31]。
2.5 抹灰板与墙面偏转角
刷斗与墙面之间的夹角对抹灰机工作有两个方面的影响:(1)影响刷斗对墙面的压力 当刷斗对墙面压力过大时,可能将灰浆挤出刷斗外,造成效率低下;当压力过小时抹上去的灰浆容易掉下来,质量达不到要求;(2)影响刷斗左侧和右侧抹灰厚度的均匀性 目前的全自动抹灰机刷斗与墙面的水平夹角都是固定的,既不能控制对墙面的压力,左右两侧的抹灰厚度也难以保证一致。在原有全自动抹灰机上,可以适当的增加检测刷斗与墙面偏转角的传感器来检测偏转角,并实时进行补偿来减缓由偏角产生的误差[32-33]。刷斗与墙面的偏转角的检测可以通过间接的方式进行。利用测距传感器测量墙面上在同一水平线上两个点与刷斗之间的距离,通过计算可得到刷斗的水平偏转角。控制器得到偏角参数后,计算左右驱动电机的推进量,推动丝杆,使得抹灰板与待粉刷墙面平行,即达到整补偿的目的。
3 展望
建筑行业的持续火热,更快的工程进度和更高效益的投资是这个行业竞争的必备武器。目前市场上的抹灰机还有很大的改进空间,可以更快、更好的完成墙面的粉刷工程,使得效益最大化。在智能抹灰机的改进过程中,会出现许多潜在的问题有待解决。智能抹灰机要进行广泛推广,有两个值得关注的趋势:
(1)更简洁、方便 在技术方面做到简单易操作,这包括组装拆卸要简单、使用过程要方便、粉刷一步到位等。这样才有机会突破使用者的使用手工抹灰的习惯,快速被基层的建设者们所接受。
(2)更智能、完善 随着社会的不断发展,人们对于墙面粉刷的质量也会变得越来越高。只有更加智能化,更加完善的抹灰机才能满足人们对抹灰机械的要求实时监测粉刷墙面的厚度、平整度、垂直度并及时自动的做出调整,智能识别不需要粉刷的区域如窗户、门、插座口、水管口等,通过开机前设置可粉刷出具有个性化的墙面等。
[1]Kale P.M.,Bagde S.T..To design and develop low cost automatic wall plastering machine[J].Research Journal of Engineering and Technology,2014,5(2):65-67.
[2]Fu K.S.,Gonzalez R.C.,Lee C.S.G..Robotics[M].New York:McGraw-Hill,1987.
[3]Shirakawa M.A.,Beech I.B.,Tapper R.,et al.The development of a method to evaluate bioreceptivity of indoor mortar plastering to fungal growth [J]. International Biodeterioration&Biodegradation,2003,51(2):83-92.
[4]Staten M.L.,Owen S.J.,Blacker T.D..Unconstrained paving& plastering:a new idea for all hexahedral mesh generation[C].Proceedings of the 14th International Meshing Roundtable.Berlin:Springer Berlin Heidelberg,2005.
[5]Cormack L.E..Plastering Machine:U.S.Patent 1,954,005[P].1934-4-10.
[6]Mccaughey G.J.,Gassman Me..Plastering Machine:U.S.Patent2,094,839[P].1937-10-5.
[7]Mccallum I.W..Plastering Machine:U.S.Patent 2,198,271[P].1940-4-23.
[8]李永江,张声军.推广应用机械喷涂抹灰技术[J].建筑机械化,2001,22(3):13-14.
[9]陆龙福,陈超.新型自动抹灰机设计与创新研究[J].机械工程与自动化,2013(5):91-91.
[10]陈万强,周小勇.基于产品功能的房体表层抹灰机结构设计[J].新技术新工艺,2012(10):42-44.
[11]刘延俊,赵敬伟,孔祥臻.半自动抹灰机的气动系统设计[J].机床与液压,2005(11):107-107.
[12]薛奎.新型半自动多功能抹灰机的设计[J].工程建设与设计,2002(3):62-63.
[13]孙世哲.一种自动抹灰机.中国,220248801[P].2012-05-30.
[14]罗永彬.一种建筑用抹灰机.中国,203201122[P].2013-09-18.
[15]沈孝芹,于复生,王佩凤.半自动墙面抹灰机的结构设计[J].机电产品开发与创新,2008,21(1):62-63.
[16]张帮振.新型自动抹灰机.中国,202559681[P].2012-11-28.
[17]刘维忠,谢守勇,王靖.智能墙体抹灰机研究[J].重庆建筑,2012,11(4):47-48.
[18]王莹,谢守勇,王靖.一种新型抹灰机的设计和仿真[J].西南师范大学学报(自然科学版),2013,37(11):112-115.
[19]杨振宇,巩传根,刘芝霞,等.新型抹灰机的设计[J].建筑机械(上半月),2007(08S):84-85.
[20]刘本福,顾斌.卷扬机安全使用规则探讨[J].汽车工艺与材料,2012(6):63-65.
[21]詹雪雄,施汉,熊亚洲.送料卷扬机卷筒强度计算及应用分析[J].机械研究与应用,2013,26(5):135-138.
[22]Titley A..Richard trevithick and the winding engine[J].Transactions of the Newcomen Society,1929,10(1):55-68.
[23]张元军.堆取料机钢丝绳卷扬机提升机构分析及设计[J].机械设计与制造,2012(10):45-47.
[24]张宏涛.谈粉墙机在工程中应用的必要性[J].建材与装饰(下旬),2013(10):122-123.
[25]姜宏伟,石万凯,秦大同.蜗杆传动磨损的理论分析[J].重庆大学学报(自然科学版),2008,31(1):5-7.
[26]李明,孙涛.齿轮传动转子—轴承系统动力学的研究进展[J].振动工程学报,2002,15(3):249-256.
[27]李乃根,王秀叶.开式齿轮传动设计中的几个重要参数的修正[J].山东建筑工程学院学报,2000,15(3):66-68.
[28]田立勇,张兰芬,孙聚涛,等.塔吊支架垂直度检测装置的研究[J].软件,2012,32(8):31-32.
[29]魏秀清.距离测量方法探讨[J].山西科技,2013(4):144-146.
[30]Amann M.C.,Bosch T.,Myllyla R.,et al.Laser ranging:a critical review of usual techniques for distancemeasurement[J].Optical Engineering,2001,40(1):10-19.
[31]纪晴,段培永,李连防,等.移动机器人全覆盖路径规划算法综述[J].山东建筑大学学报,2007,22(4):355-359.
[32]曹建安,张乐平,吴昊,等.采用倾角传感器实现空间旋转角度测量的解析方法研究[J].西安交通大学学报,2013,47(10):109-114.
[33]刘文魁,石建玲.光电旋转编码器在角度测量中的应用[J].现代制造工程,2007(11):90-91.
猜你喜欢
硅酸盐通报(2022年9期)2022-10-10 11:11:12
建材发展导向(2022年3期)2022-04-19 12:51:14
建材发展导向(2021年19期)2021-12-06 03:20:24
建材发展导向(2021年13期)2021-07-28 07:15:36
建材发展导向(2021年9期)2021-07-16 07:11:04
江苏建材(2021年3期)2021-03-30 15:34:41
当代陕西(2020年17期)2020-10-28 08:17:56
江西建材(2018年4期)2018-04-10 12:36:50
学苑创造·A版(2017年5期)2017-05-09 06:12:24
林业与生态(2016年2期)2016-02-27 14:23:59