
空间绳网机器人的张力控制机构研制与性能研究
2015-01-08 06:03:56郭吉丰
浙江大学学报(工学版) 2015年10期
王 班,易 琳,郭吉丰
(浙江大学电气工程学院,浙江杭州310027)
空间绳网机器人的张力控制机构研制与性能研究
王 班,易 琳,郭吉丰
(浙江大学电气工程学院,浙江杭州310027)
研制空间绳网机器人的张力控制机构样机.论证绳网机器人捕获目标物后从两分散刚体镇定成一个稳定复合体过程中可能出现的冲击、摆动和振动等问题.借鉴钓鱼过程中通过弹性钓杆和线盘组合保证提供合理的张力,说明张力控制机构及控制技术是空间绳网机器人捕获目标物的关键技术之一,通过张力控制配合绳网机器人系统总体运动规划和控制策略是有效解决上述问题的唯一途径.提出系绳张力机构必须具有系绳入角姿态可测、绳长可测和系绳张力可控可测等功能要求.开展高精度的张力控制机构设计工作,对研制的样机进行单机测试和地面防冲击缓冲释放实验.测试和实验结果反映张力控制机构样机具有很好的操作性,能够较好地满足地面试验要求.
绳网机器人;系绳张力控制机构;单机测试;防冲击
空间碎片清理、防止小行星撞击地球等空间任务是当前空间探索的重要任务之一[1].空间绳网机器人一般采用自由飞行任务星与飞网弹射捕获装置相结合的方式.当目标物在绳网捕获作业的有效距离内,绳网将被指向目标物弹射、张开并包裹锁紧目标物,此后目标物通过系绳与任务星连接,可以根据任务需求拖曳目标实施变轨[2].与传统的机械臂等抓捕方式相比,空间绳网机器人具有安全性高、对任务星影响小、消耗能量少和抓捕容错范围大等优点.Mankla等[3-4]对空间绳网机器人进行理论研究,主要包括捕获动力学仿真与控制.另外,ESA在2001年提出利用绳网机器人抓捕地球静止轨道废弃卫星的轨道回收器(ROGER)项目[5].国内研究也在稳步推进中,并取得了一定的研究成果[6-9].上述工作主要是针对空间绳网机器人系统的运动规划、动力学建模和控制策略等方面的研究,都没有针对空间绳网机器人捕获要求设计相应的张力控制机构样机,而系绳张力控制技术对绳网机器人来说是一项关键技术,能够实现系绳张力控制的机构对捕获任务能否顺利完成有重要影响.国外相关机构开展了空间绳系卫星的绳系控制机构方面的研究,主要是针对两星间长距离(千米级)的.美国国家航空航天局(NASA)在绳系卫星任务YES2[9]与欧洲太空局(ESA)的绳系卫星SED2[10]中采用了‘螺旋轴’张力控制机构,通过系绳缠绕螺旋轴圈数的多少对系绳张力进行控制,并成功进行了空间在轨试验,但该控制机构只能实现系绳的释放而不具有系绳的回收功能.Mori等[11]为类似绳系卫星编队研制了一种张力控制机构样机,在地面气浮平台上进行了绳系编队组合的控制试验,但该样机各构件集成度较低,体积过大.文浩[12]为进行地面实验,提出一种简易的系绳控制机构,无张力检测,只可实现简单的系绳收放功能而无法实现张力闭环控制.空间绳网机器人是近距离(300 m以内)进行捕获、拖曳、离轨等操作的,因此在系绳长度、系绳张力以及系绳工作状态等方面与绳系卫星都存在很大差别,空间绳网机器人张力控制机构有特殊性.
本文针对空间绳网机器人捕获目标物过程中,为实现各种任务系绳张力控制机构应具有的功能和设计要求,具体给出一种张力控制机构的结构方案.研制样机,并结合样机进行单机张力控制测试和防冲击缓冲释放实验.
1 捕获过程及对张力控制机构要求
如图1所示,绳网机器人一般由任务星、系绳张力控制机构、系绳、绳网和4个收口质量块等组成.张力控制机构固定在任务星上,任务星上安装有绳网发射机构.在捕获动作进行的前期,任务星调整到与目标物较近距离(百米级),任务星通过弹射装置将绳网发射并通过质量块牵引绳网并张开,使绳网快速接近目标物;当目标物完全落入网中后,4个收口质量块动作,收紧收口绳,将网口收紧锁死,而后张力控制机构根据要求对目标物进行回收、释放和拖曳(状态保持).通过任务星的轨道调整,使两者进入预定的废弃轨道.

图1 绳网机器人捕获概念图Fig.1 Capture concept of tethered robot
当网口完全收拢后,目标物被完全包覆,系统处于空间悬浮开放状态.从物理意义上来讲,捕获过程是从两个分散系统(刚体)形成一个稳定的刚柔藕合系统的过程,这在整个绳网机器人空间捕捉过程中是最复杂的,即需要实施捕获后复合体协调控制过程,这时单纯依靠任务星运动姿态控制有很大难度,需要张力控制机构进行协调控制.当任务星和目标物形成空间两刚体和一绳系组成的稳定复合体后,可以通过连接系绳实现对目标物的回收、释放、拖曳、离轨等操作,这些过程一般是通过系统整体控制策略(任务星的运动姿态控制)加张力控制机构组合完成的.考虑目标物的回收、释放、拖曳、离轨等操作过程较捕获后复合体协调控制过程简单得多,对张力控制机构无特殊要求,为此重点分析捕获后复合体协调控制过程中的各种可能性.
捕获后复合体协调控制过程中,由于任务星和目标物在捕获后两者一般会有一定的速度差(平动速度差和旋转速度差),速度差产生的原因主要有跟瞄系统的误差、发射引起的任务星运动和绳网包覆过程对目标星的冲击等,因素较多.当存在平动速度差时,有两种可能:一是两者接近,以任务星为参考点,若目标物接近,任务星则采用推进装置主动避让并牵引,但牵引过程会出现系绳突然拉紧现象,如图2(a)所示.若目标物远离时,也会出现突然拉紧,如图2(b)所示.这两种情况,若处理不好,可以引起系绳断裂和系统失稳,并伴有系绳纵向振动,这时需要类似于钓鱼杆上线盘和钓杆功能的张力控制装置适当释放系绳,并使系绳张力连续下降至稳态值(即不超调).最理想的状态是两刚体通过系绳产生同向同速运动,系绳的释放和张力控制可以采用自整定PID控制律对系统实现防冲击缓冲释放,使两者动量实现柔性交换.

图2 系绳突然拉紧前的松弛现象Fig.2 Relaxation phenomenon when tether is taut
当两者相对系绳轴线转速度不一致时,相对任务星的目标物自旋易使系绳缠绕,须通过系统整体运动策略和系绳张力控制等实现目标物消旋.
当任务星推力方向与连接系绳不在同一方向上时,系统会存在空间摆动现象,必须通过控制系绳长度或者张力等配合绳网机器人整体运动控制进行摆动抑制,以保证系统的稳定,因此需要检测任务星与目标物的相对姿态角.在张力控制机构系绳入口设置姿态角检测装置比较简便,且须测量两个自由度的入角.另外,将任务星和捕获目标物从两个分散系统镇定成一个绳网机器人稳定系统时,系绳的作用力是快速变化的,系绳一般采用具有弹性、时滞、大阻尼等非线性特征的高分子材料,易诱发系绳的纵、横向的振动,须通过张力控制实现振动抑制.
以上分析表明,张力控制的目标是通过系绳的收、放张力控制操作完成两刚体的动量交换,使两刚体的运动速度尽量保持高度一致,并保证两刚体的有效连接,避免冲击、缠绕、摆动等问题的出现,保证捕获、曳引、释放等任务高效地完成.针对以上对系统控制的要求,用于控制连接绳的张力控制机构必须有绳长控制、绳长速率控制、张力控制、空间姿态角度可测量和系绳张力可测量等功能,且工作模式可调.
由于两刚体完全是通过系绳实现连接,从太空环境的特殊性以及捕获任务出发,对连接系绳和绳网有多方面的要求:强度高、耐高(低)温、质量轻和柔软性好等.常选择综合性能好的凯夫拉纤维作为系绳的材料,但凯夫拉系绳自身具有黏弹性、塑性变形等非线性特性[13],且当系绳较长时,会呈现变阻尼和滞回特性[14]等现象.凯夫拉系绳特性如何描述和识别以及绳网机器人捕获过程中如何利用该特性等,都是亟待解决的问题.
根据以上分析,可以汇总对张力控制机构的功能和设计要求如下.
1)张力控制机构系绳的长度可控,即可以实现系绳的释放和回收.
2)张力控制机构的张力大小要易控,控制分辨率要尽量高,对电机不仅要求速度和位置型伺服,还要求有力矩伺服,从而实现系绳的张力控制.
3)张力控制机构要能够测量系绳的卷取或释放的长度、速度和张力.
4)张力控制机构要能够实现系绳姿态角的测量.由于空间绳网机器人在捕获到目标物后,任务星与目标物的相对位姿关系可以用系绳姿态入角描述,特别是当两者存在空间相对摆动时,必须测量系绳姿态入角并控制摆动(一般为二维空间摆动),须有两自由度的空间姿态角测量功能.
5)张力控制机构的集成度要高,结构简单、可靠和紧凑等.
2 张力控制机构样机研制

图3 张力控制机构样机Fig.3 Prototype of tension control mechanism
考虑系绳要释放、回收及张力控制,采用力矩/速度/位置伺服电机实现对系绳张力的控制,张力控制机构的最前端必须有测量张力的传感器,保证测量到的是系绳张力.随后,计量系绳释放或回收的长度或速度.如图3所示为根据具体使用要求所设计的系绳张力控制机构[15].动力模块驱动卷绳筒,系绳入角姿态测量机构可分可合,分时结合系统的总体要求可以在任务星平台的其他位置安装.系绳张力测量传感器和入角姿态测量机构之间,需要系绳张紧装置,但张紧装置的张力应尽量小,保证系绳在张力控制机构中的释放和回收状态都是张紧的,张紧装置的预紧张力应尽量满足张力测量的最小分辨率要求.动力模块由伺服电机、减速器、光电编码器和电磁刹车组成,须采用动力模块与走绳模块平行的方案,节省空间.绳长测量机构和张力测量器等组成走绳模块.
空间两自由度的姿态入角测量是一个难题,接触式测量会带来额外阻力,非接触式测量如CCD光学成像传感器检测[16]因空间环境辐照强和明暗快速交替等的影响会使得测量结果不可靠.本文采用2个正交安装的滑轨支架的接触式测量,如图4所示.采用两同心安装的半环框架a和b相交,各绕相交的轴线转动.球心处和相交框架处都有出线孔.系绳张力推动两半环框架绕各自的轴线转动.两半环框架分别带动两编码器转动,从而测得系绳在2个方向的摆动角度.为了避免空间辐射的影响,两角度传感器是电位移器而非光电式.这种姿态角测量会要求系绳存在一个最小张力,用于克服两半环框架阻力.
走绳模块的具体结构和功能如图5所示.系绳首先穿过姿态入角测量装置中两弧形悬臂底部中心的方形槽,然后经过弧形悬臂球心处的出线口穿出.经过系绳预紧张力器,通过调节螺母控制预紧张力,系绳的预紧张力既要比较小又要稳定,保证系绳在外部松驰的情况下,张力控制装置内的系绳具有一定的张紧力,但不能对力矩控制有较大的影响,因为张力测量点在预紧张力器之后,即控制张力与实际张力至少有预紧张力的误差,样机预紧张力可以控制在0.05 N左右.然后系绳经过辅助轮1和辅助轮2,将系绳引导至张力测量轮处,张力测量轮与张力传感器相连,再经过绳长测量轮将系绳连接固定于卷筒的内壁处.绳长测量轮上方装有系绳压力调节装置,调节螺母可以调节导轮与系绳的摩擦力到合适值,从而避免出现打滑,这样测量得到的绳长将更准确.

图4 空间姿态入角测量机构Fig.4 Attitude angles measurement mechanism

图5 走绳模块结构Fig.5 Structure of tether conduct module
当系绳较短时,可以采用窄卷线筒;当系绳较长时,应采用宽卷线筒,这时要考虑系绳在卷绕筒上的分布情况,需要有排线机构[12],否则会使系绳在卷绕筒上发生塌落现象.要实现收、放绳一致性,收绳和放绳两状态必须切换,否则对张力控制会有很大的影响.电气线圈绕线机和纺织上许多排线控制机构具有一定的借鉴意义[17-18].
张力控制机构的控制系统示意图如图6所示,DSP为系统处理器,卷取机构上的长度测量装置、张力传感器以及伺服电机的编码器实时地将所测得的数据传输给DSP处理器,DSP处理器根据所得的数据经过计算将驱动指令通过CAN总线发送给驱动器来对伺服电机进行控制.伺服驱动系统采用全数字伺服驱动控制,实现电流环(力矩模式)、速度环、位置环的闭环伺服控制,通过DSP处理器编程控制,高效功率变换.电机的状态信息通过CAN总线发送给主控器.同时,通过CAN总线接收主控器发送的指令.
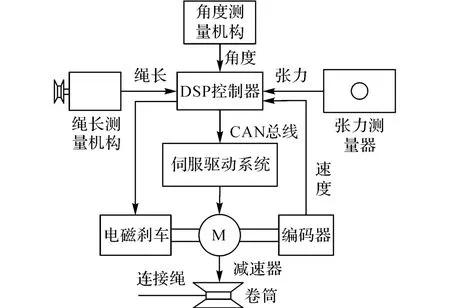
图6 张力控制机构控制系统示意图Fig.6 Control system of tension control mechanism
3 单机性能测试实验
研制的张力控制机构样机如图3所示.对样机进行单机实验、防冲击缓冲释放控制实验和摆动抑制等实验,该张力控制机构能够较好地实现上述作业.
张力控制机构样机的性能参数如表1所示.表中,lm为最大卷绳长度,δl为绳长测量精度,FTm为提供最大张力,δFT为张力测量精度,θ为角度,δθ为角度测量精度.张力的测量精度为0.1 N,适合于任务星小推力下的张力控制,预紧张力为0.05 N,对张力测量的影响很小.另外,机构各模块的测量误差较小,精度较高.

表1 张力控制机构性能参数Tab.1 Property parameters of tension control mechanism
张力控制采用闭环PID调节,为了测试张力控制机构的张力跟踪性能,对样机进行单机张力控制测试,实验示意图如图7所示.
将系绳末端固定,通过张力控制机构对系绳张力进行控制,将目标张力分设为斜坡函数、阶跃函数和正弦函数形式.为了了解张力控制机构在不同系绳长度情况下的张力跟踪能力,分别对短系绳(l为0.2 m)、长系绳(l为10 m)和超长系绳(末端连接一根柔软弹簧模拟)进行测试,测试结果分别如图8~10所示.图中,FT为张力.
对于各种尺度系绳,张力控制装置样机都能够较好地完成系绳张力跟踪任务,且随着系绳尺度的增大,张力跟踪过程中系绳张力波动有所增加,特别地,对大尺度系绳进行阶跃张力跟踪测试时,张力超调量较大,后续可以考虑将一些先进的控制算法应用于系绳张力控制.由于张力控制机构中在张力传感器前端安装有滑轮、预紧张力器及出绳孔,会使得张力传感器的测量数值与外部系绳张力有一定的差值,且该差值与系绳收放速度及系绳张力有关.建立该差值的具体模型并将该模型加入到控制策略中加以补偿是下一步须详细研究的内容.

图7 单机测试实验示意图Fig.7 Schematic diagram of single test experiment

图8 短系绳单机测试结果Fig.8 Test results with short tether
4 防冲击缓冲释放实验
在捕获后复合体协调控制过程中,由于两者一般会存在速度差、导致系绳突然拉紧的情况,这种情况会对系绳造成较大的冲击力,不利于系统的稳定,必须加以控制.当目标星为一合作目标时,一般会在目标物上安装喷气推进装置,当喷气力为恒定值时,则绳子突然拉紧时对任务星造成的冲击和后续的振动情况可以用地面重力场下的实验进行模拟.如图11所示为所设计的地面防冲击缓冲释放实验方案示意图.张力控制机构的系绳末端与一0.9kg的重物相连,通过一滑轮使重物竖直悬挂,重物上方固定安装一激光位移传感器,用来实时采集重物在竖直方向的位移X.位移X的原点取在重物下方的地面上,竖直向上为正方向,张力控制机构中的张力传感器实时采集FT,通过计算机将位移和张力进行处理与输出.
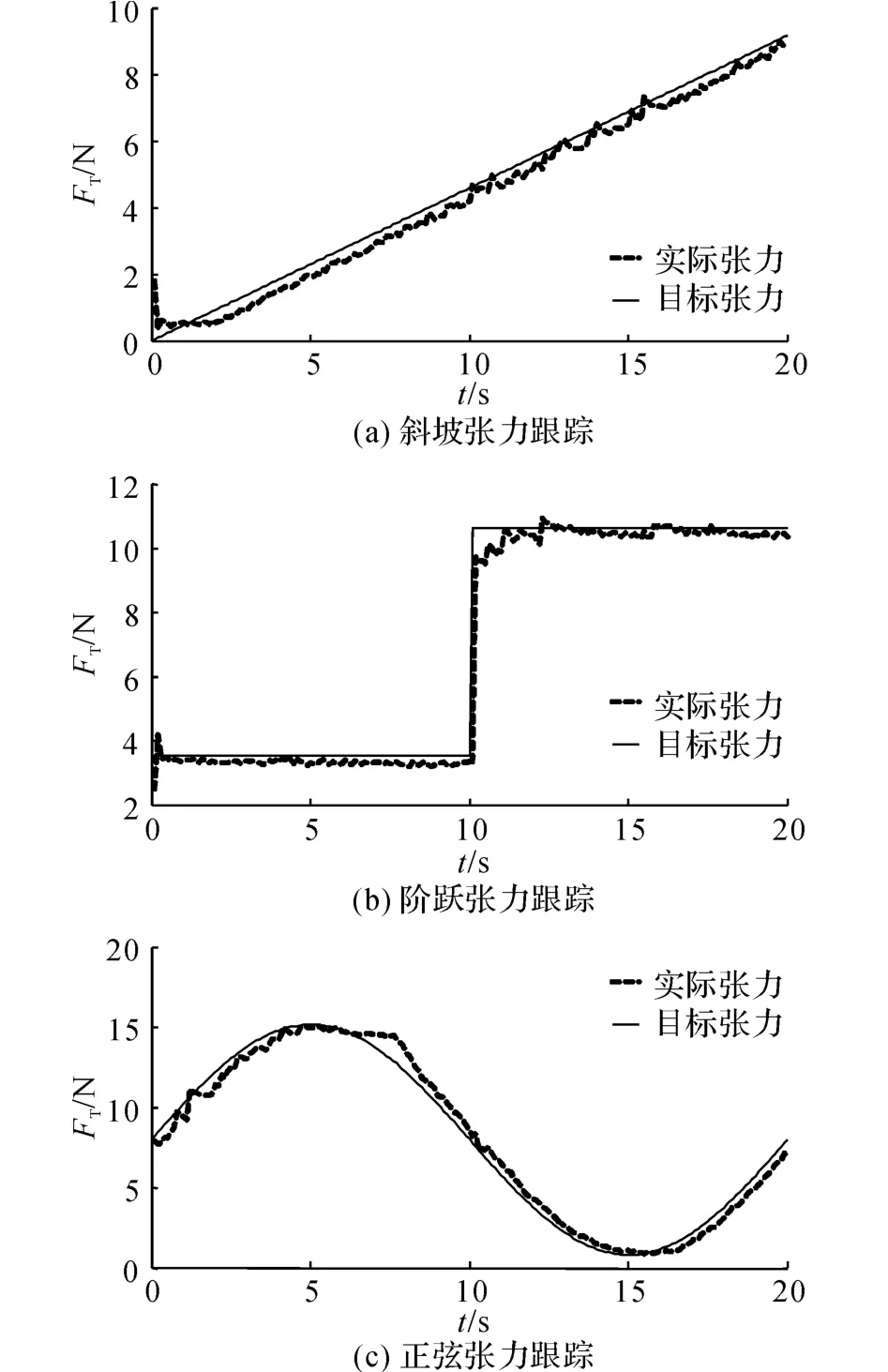
图9 长系绳单机测试结果Fig.9 Test results with long tether
为了方便对比,首先进行不控条件下的实验,即用电磁刹车将张力控制机构的卷线筒锁死,然后将重物提起一定高度释放.重物运动过程中的X及FT的变化如图12所示.
通过张力控制机构对系绳张力进行闭环控制.设由控制系统到张力控制机构张力输出环节的传递函数为G(s),输入为给定无刷直流伺服电机电枢电流,输出为系绳张力.设张力传感器的传递函数为H(s),控制系统的传递函数为Gc(s),给定张力和实际系统输出张力分别为R(s)和C(s),闭环控制系统框图如图13所示.
在相同的条件下将重物释放,重物运动过程中的位移及系绳张力变化如图14所示.
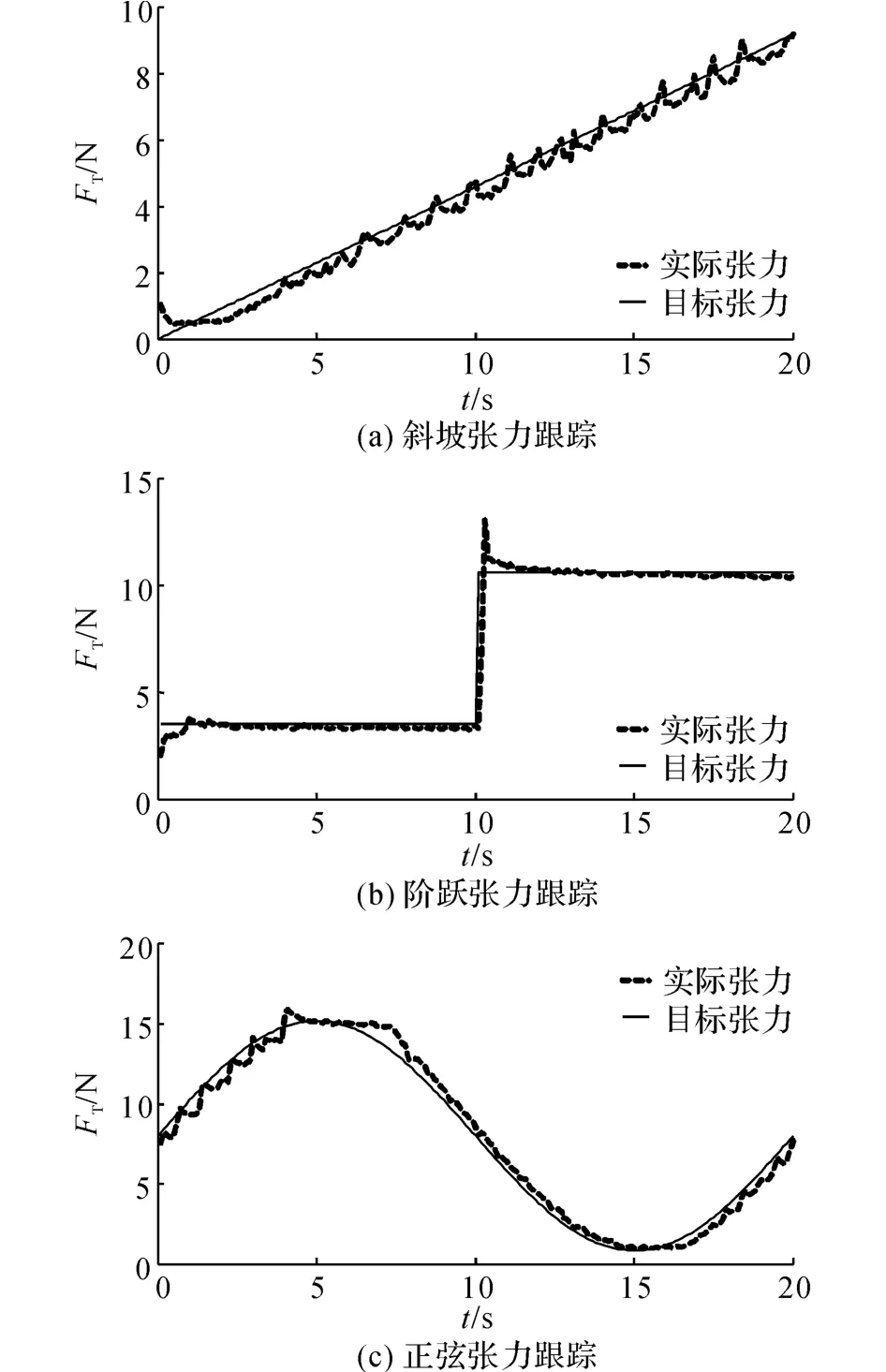
图10 超长系绳单机测试结果Fig.10 Test results with superior long tether
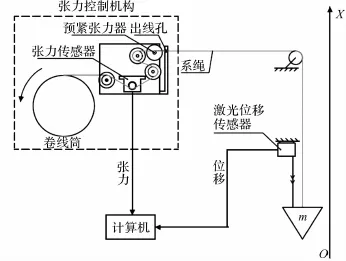
图11 防冲击缓冲释放实验示意图Fig.11 Schematic diagram of anti-impact buffering release experiment
通过上述2组实验可以看出,在不控条件下,由于重物在系绳拉紧前具有一定的速度,重物对系绳的冲击力较大,且后续持续一定的振动;在使用张力控制机构进行张力闭环控制后,重物对系绳的冲击力大大减小,且完全抑制了后续的振动现象.上述结果验证了所设计的张力控制机构良好的控制性能和操作性能,下一步可以考虑在该实验中加入最优控制,如使重物在最短的时间内达到静止状态.

图12 张力不控时的实验结果Fig.12 Experimental results under uncontrolled condition

图13 张力闭环控制框图Fig.13 Diagram of tension closed loop control

图14 张力控制条件下的实验结果Fig.14 Experiment results under tension control condition
5 结 语
对于空间绳网机器人捕捉空间碎片作业,张力控制技术是一项关键技术.通过对捕获过程的分析,得出适用于空间绳网机器人的张力控制机构必须具有绳长可控可测、张力可控可测及系绳空间入角姿态可测量等功能的结论.据此研制的张力控制机构样机能够基本满足要求,且有较高的张力控制分辨率,对各种系绳尺度都具有良好的张力跟踪能力.开展的地面防冲击缓冲释放实验获得了良好的实验效果,说明张力控制机构样机具有较好的操作性和良好的实际应用价值.该张力控制机构为绳系机构相互之间实现张力控制和其他控制策略提供了基础.
(
):
[1]陈钦.空间绳网系统设计与动力学研究[D].长沙:国防科技大学,2010.CHEN Qin.Design and dynamics of an orbital net-capture system[D].Changsha:National University of Defense Technology,2010.
[2]翟光,仇越,梁斌,等.在轨捕获技术发展综述[J].机器人,2008,30(5):467-480.
ZHAI Guang,QIU Yue,LIANG Bin,et al.Development of on-orbit capture technology[J].Robot,2008,30(5):467-480.
[3]MANKLA K K,AGRAWAL S K.Dynamic modeling and simulation of impact in tether net/gripper systems[J].Multibody System Dynamics,2004,11(3):235-250.
[4]WILLIAMS P.In-plane payload capture with an elastic tether[J].Journal of Guidance,Control,and Dynamics,2006,29(4):810-821.
[5]BISCHOF B,KERSTEIN L,STARKE J,et al.ROGER robotic geostationary orbit restorer[J].Science and Technology Series,2004,109:183-193.
[6]ZHAI G,QIU Y,LIANG B,et al.On-orbit capture with exible tether-net system[J].Acta Astronautica,2009,65(5):613-623.
[7]翟光,张景瑞.空间非合作目标快速姿态跟踪导航方法研究[J].宇航学报,2013,34(3):362-368.
ZHAI Guang,ZHANG Jing-rui.Research on rapid attitude tracking for space non-cooperative target[J].Journal of Astronautics,2013,34(3):362-368.
[8]李京阳,于洋,宝音贺西,等.空间飞网系统抛射参数优化研究[J].宇航学报,2012,33(6):823-829.
LI Jing-yang,YU Yang,BAOYIN-Hexi,et al.Projecting parameters optimization for space web systems[J].Journal of Astronautics,2012,33(6):823-829.
[9]MENON C,KRUIJFF M,VAVOULIOTIS A.Design and testing of a space mechanism for tether deployment [J].Journal of Spacecraft and Rockets,2007,44(4):927-939.
[10]LORENZINI E C,BORTOLAMI S B,RUPP C C,et al.Control and flight performance of tethered satellite small expendable deployment system-I1[J].Journal of Guidance,Control,and Dynamics,1996,19(5):1148-1156.
[11]MORI O,MATUNAGA S.Formation and attitude control for rotational tethered satellite clusters[J].Journal of Spacecraft and Rockets,2007,44(1):211-220.
[12]文浩.绳系卫星释放和回收的动力学控制[D].南京:南京航空航天大学,2008.WEN Hao.The dynamics control of deployment and retrieval for tethered satellite system[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2008.
[13]WORTMANN F J,SCHULZ K V.Non-linear viscoelastic performance of Nomex,Kevlar and polypropylene fibres in a single step stress relaxation test:2.Moduli,viscosities and isochronal stress/strain curves [J].Polymer,1995,36(12):2363-2369.
[14]ETTER J R,HEDDING L R.An experimental investigation of the longitudinal dynamics of long Kever tethers[C]∥Proceedings of the Astrodynamics Conference.Hilton Head Island:AIAA,1992:579-582.
[15]郭吉丰,谭春林,刘永健,等.一种张力和收放长度可控的系绳收放装置:中国,CN103587722A[P].2014-02-19.
[16]郭吉丰,白洋,王剑.多自由度超声波电机的研究进展和展望[J].振动与冲击,2013,15(32):1-7.
GUO Ji-feng,BAI Yang,WANG Jian.Recent development and prospect of multi-degree-of-freedom ultrasonic motors[J].Journal of vibration and Shock,2013,15(32):1-7.
[17]潘骏,许仕伟,陈文华,等.基于轴线压力补偿的精密排线数学模型和运动控制算法研究[J].中国机械工程,2011,22(20):2411-2415.
PAN Jun,XU Shi-wei,CHEN Wen-hua,et al.Research on mathematical models of high-precision winding displacement with pressure-dependent axial clearance and its motion control algorithm[J].China Mechanical Engineering,2011,22(20):2411-2415.
[18]刘洪玮,郭吉丰,孙云云,等.两轴伺服控制的绕线机系统[J].电气传动,2010,40(9):9-12.
LIU Hong-wei,GUO Ji-feng,SUN Yun-yun,et al.System of coil winding machine base on the double-axis servo system[J].Electric Drive,2010,40(9):9-12.
Performance study and development of tether control mechanism for space tethered-net robot
WANG Ban,YI Lin,GUO Ji-feng
(College of Electrical Engineering,Zhejiang University,Hangzhou 310027,China)
The prototype of tension control mechanism for space tethered-net robot was developed.The possible impact,swing and vibration problems during the system stabilized from two decentralized rigid bodies to a stable combination were emphatically demonstrated.The tension control mechanism and its control strategy is one of thekey technologies,and the only way to solve the problem is the coordination of tension control and the whole motion planning which is inspired from providing reasonable tension by the coordination of fishing rod and reel.The tension control mechanism should be with the measurement of attitude angles,the measurement of the length of tether,the regulation and measurement of tether tension in order to fulfill the control requirements.A design scheme of tension control mechanism with high precision was proposed.The single machine test and anti-impact buffering release experiment were conducted.Results show that the tension control mechanism has good operability and can fulfill the requirements of experiments on the ground.
tethered-net robot;tether tension control mechanism;single machine test experiment;anti-impact
V 526
A
1008-973X(2015)10-1974-08
2014-07-21.浙江大学学报(工学版)网址:www.journals.zju.edu.cn/eng
国家自然科学基金资助项目(51475411);国家“863”高技术研究发展计划资助项目(2013AA7044026).
王班(1988—),男,博士生,从事空间机器人技术及空间结构设计的研究.E-mail:bigban@zju.edu.cn
郭吉丰,男,教授.E-mail:usm@zju.edu.cn
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08 02:42:40
宇航学报(2021年10期)2021-12-13 01:29:02
北京航空航天大学学报(2021年7期)2021-08-13 08:33:14
兵工学报(2021年5期)2021-06-24 06:56:58
兵器装备工程学报(2021年5期)2021-06-02 02:23:28
宇航学报(2021年4期)2021-05-24 07:31:54
空间科学学报(2021年6期)2021-03-09 06:20:12
装备制造技术(2020年4期)2020-12-25 05:26:04
时代农机(2016年6期)2016-12-01 04:07:20
环境科技(2015年4期)2015-11-08 11:10:40
