新型配砟车避障系统的研发与应用
2015-01-07 07:44:34游彦辉高春雷王发灯
铁道建筑 2015年6期
游彦辉,高春雷,王发灯
(中国铁道科学研究院铁道建筑研究所,北京100081)
新型配砟车避障系统的研发与应用
游彦辉,高春雷,王发灯
(中国铁道科学研究院铁道建筑研究所,北京100081)
研究发了一种新型的配砟车辅助避障系统,该系统可实现作业时对前方障碍物加以规避及作业后对道床轮廓予以检测,其采用了传感器测量技术、AD采集技术、非接触测量技术及可视化人机界面,既能实时采集障碍物信息,又可结合侧犁外伸参数对车辆前方的障碍物进行智能判断并记录相关信息。现场应用表明该系统精度高,性能稳定,简单易用。
激光扫描 障碍判断 自动报警
大型养路机械普遍缺少在作业时对障碍物进行检测的装置,常采用人工观察障碍物的方法。由于人员误操作以及观察不及时等原因,导致各种机型大型养路机械作业时经常出现与障碍物发生碰撞的情况。因此,结合DPZ-440型单向配砟整形车的特点,研发了一套辅助避障系统,既可有效提高配砟车作业时的安全性,又可提高作业效率。本文介绍所研发的避障系统的组成及工作原理。
1 避障系统组成
1.1 位移传感器
位移传感器用来测量侧犁外伸参数,是避障系统重要的组成部分。经比选,采用如图1所示的拉绳位移传感器,其线性度能达到≤0.15%,转换系数为11.9 mV/mm。该传感器具有易安装、性能稳定、牢固、不易损坏等特点。

图1 位移传感器
避障系统共安装10个位移传感器,分别安装在左右侧犁的10个油缸上,可保证测量精度。
1.2 激光传感器
选用SICK公司的LMS511型激光传感器,如图2所示。该传感器扫描角度达180°,最大扫描距离为40 m,扫描频率75次/s,角度分辨率可达0.25°,测量精度为±24 mm。该传感器采用非接触式测量,主要用于室外的物体测量及防撞。

图2 LMS511型激光传感器
相较于传统的红外传感器、超声波传感器等测距方式,采用激光传感器不受灰尘影响,测距精度更高,更适用于作业时的恶劣环境。
1.3 工控机
工控机是避障系统的核心控制部件。选择了型号为NISE2100A的工控机,如图3所示。其支持9~36 V宽压输入,有两个千兆网口,2个485口,4个USB口,具有良好的抗震性。
2 测量原理
2.1 侧犁外伸值测量原理
在避障系统中,对侧犁外伸参数的测量是实时性的,通过左右共10个位移传感器得到左右侧犁最外端距轨心的距离值和距轨面的高度值。测量原理见图4。
如图4所示,以伸缩筒油缸旋转轴为原点建立坐标系,通过坐标转换,再与X1,Y1点距离轨道中心的高度值和水平距离值进行计算,就可以把侧犁最外端距离轨道中心的高度值和外伸值计算出来。

图3 工控机

图4 侧犁外伸参数测量原理
2.2 扫描原理
测量障碍物采用了激光传感器,障碍物扫描原理见图5。
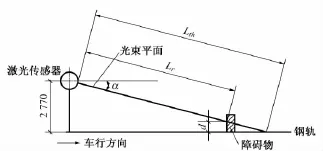
图5 障碍物扫描原理(单位:mm)
避障传感器安装于车头距轨面2 770 mm高的地方,α为安装角,约为14°,保证光束平面在道床上返回的长度值不超过16 m。光束平面与水平面的夹角为α,这样每次扫描都会有多个点的返回值,Lth为扫描到道床上的点应返回的理论值,Lr为实际测量值,则测量出的障碍物高度d=(Lth-Lr)/sinα。若d大于设定的障碍高度,则可以判定前面遇到高出道床轮廓的障碍物了,这就是该避障系统检测障碍物的基本原理。
2.3 障碍判断
避障系统的检测部分要测量障碍物及侧犁的外伸参数。障碍物的测量除了使用激光传感器以外,还要结合里程传感器的里程信息,根据速度来判断障碍物距离车头的距离,同时,再依据侧犁外伸的参数,来判断侧犁是否会碰到障碍物。
如果在侧犁外伸的范围内发现前方有障碍物,且该障碍物在侧犁的安全距离之内时,在自动避障的模式下,将输出停车信号,实现自动停车,实时报警并给出文字提示。如果是在手动避障的模式下,将提供文字提示及声音报警。
3 避障系统应用及探讨
3.1 系统应用
打开PC控制系统后,可根据现场作业的实际情况对避障系统参数进行设置,如障碍物的高度、避障模式(自动避障或手动避障),并输入作业线路的信息(线路名称、起始里程等)。
激光传感器启动成功以后,开始实时检测前方的物体,结合侧犁外伸的参数对前方扫描到的障碍物进行判断。避障系统软件界面如图6所示,内部的红色区域(图中深色线内)是侧犁外伸参数的形象展示,外侧两根竖线则为测量范围,上方为道床轮廓演示曲线。在内框红色区域内的障碍物为危险障碍物,将会碰到侧犁,如果该障碍物不在红色区域内,将显示为黄色。如果碰到危险障碍物,除了在软件界面上方有红色文字提示操作人员以外,还有声音报警,直到将侧犁收回到安全范围以后红色提示框以及声音报警才会消失,这样就避免了操作人员在没有消除障碍的情况下继续行车。
避障系统软件还提供了保存功能,可以将碰到的障碍物及其里程信息保存下来,并可实现数据回放。这样既方便了现场排除障碍,也利于后续的作业分析。
3.2 大机避障技术探讨
在大机作业时,除了配砟车以外,其余车型还普遍缺乏安全保护系统。将来可以在各种车型上结合作业情况,安装相应的避障系统,采用测量和监测于一体的集成系统,并利用可视化界面实现障碍的实时检测,进一步与车上的外伸装置的控制信号进行集成,从而实现自动收车避障。
如果大型养路机械均采用了避障系统,不但可以保障作业安全,还可以提高作业效率,从而减少人力物力成本,延长大机使用寿命。

图6 避障系统软件界面
4 结语
根据现场使用经验,本文介绍的大型养路机械避障控制系统具有如下特点:
1)实时检测。激光传感器可进行扫描角度180°、频率75次/s的扫描,对前方障碍物进行全面监视。
2)非接触测量。激光传感器通过发射激光并接收返回的激光从而判断障碍物的距离。该方法高效、实用。
3)自动检测侧犁参数。通过位移传感器检测侧犁的外伸值和距轨面高度,为判断障碍提供依据。
4)自动报警。通过计算传感器返回的数据,结合侧犁的外伸值给出障碍物的文字及声音报警信息。
近几年的使用效果证明了该系统具有稳定可靠、速度快、安装方便、操作灵活等特点。
[1]高春雷.DPZ-440型单向配砟整形车研究设计报告[R].北京:中国铁道科学研究院,2006.
[2]王发灯.配砟车避障系统的设计[J].铁道建筑,2008(1): 93-95.
[3]张宏林.Visual C++6.0程序设计与开发技术大全[M].北京:人民邮电出版社,2004.
[4]刘和平.dsPIC通用数字信号控制器原理及应用:基于dsPIC30F系列[M].北京:北京航天航空大学出版社,2007.
[5]张海涛.基于多超声波传感器的避障系统设计[J].山西科技,2006(1):20-21.
[6]胡传亮,高春雷,王发灯,等.非接触障碍检测技术在清筛机污土带避障中的应用[J].铁道建筑,2013(3):121-124.
[7]薛安琳.基于无线测距技术的清筛机污土带辅助避障系统应用研究[J].铁道建筑,2013(6):160-163.
[8]高春雷,陆亦群,方健康.国内新型道床配砟整形车的研发[J].铁道建筑,2007(7):97-99.
[9]高春雷,方健康.DPZ-440型单向配砟整形车——新一代配砟整形大型养路机械的研制[J].铁路技术创新,2009 (1):16-20.
[10]牛怀军.道床轮廓测量系统的研制[J].铁道建筑,2008 (1):96-99.
(责任审编李付军)
U216.63
A
10.3969/j.issn.1003-1995.2015.06.41
1003-1995(2015)06-0160-03
2014-10-06;
2014-12-10
游彦辉(1983—),男,云南镇雄人,助理研究员,硕士。
猜你喜欢
少先队活动(2022年4期)2022-06-06 07:19:46
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
布达拉(2019年6期)2019-07-18 03:36:55
铁道通信信号(2018年11期)2019-01-19 01:15:08
北方人(2017年10期)2017-07-03 14:07:24
中国公路(2017年12期)2017-02-06 03:07:30
铁道通信信号(2016年12期)2016-06-01 12:12:00
铁道通信信号(2016年11期)2016-06-01 12:11:32
河南科技(2014年14期)2014-02-27 14:11:56