流速仪检定车的同步电机驱动设计
2015-01-02 02:27金玉虹褚泽帆
水利信息化 2015年2期
金玉虹,褚泽帆,顾 倩
(1. 水利部南京水利水文自动化研究所,江苏 南京 210012;
2. 水利部水文水资源监控工程技术研究中心,江苏 南京 210012;
3. 河海大学计算机与信息学院,江苏 南京 210098)
流速仪检定车的同步电机驱动设计
金玉虹1,2,褚泽帆1,2,顾 倩3
(1. 水利部南京水利水文自动化研究所,江苏 南京 210012;
2. 水利部水文水资源监控工程技术研究中心,江苏 南京 210012;
3. 河海大学计算机与信息学院,江苏 南京 210098)
随着新材料新设备的出现,流速仪检定车采用交流异步和同步电机驱动已成为可能。阐述流速仪检定车采用同步电机变频驱动的原因,详细分析在同步电机驱动下,变频器选择需要考虑的因素,检定车转矩的分配方法,电机功率估计和耗能制动的距离计算,以期为同步电机变频驱动的推广应用提供借鉴。
同步电机;驱动;流速仪检定车;变频器;耗能制动
0 引言
流速仪检定车驱动系统是流速仪检定车的关键环节,过去由于受客观条件的制约,驱动系统几乎全都采用直流电机驱动。随着新技术新设备的出现,交流异步和同步电机驱动已成为可能。但在实际操作中究竟采用哪种方式,往往因设计者的习惯或熟悉程度而选择。通过对几种驱动方式的分析,总结得出最适合流速仪检定车的驱动方式是交流同步电机驱动。由于同步电机只能采用变频调速,变频器的相关参数对同步电机驱动的影响较大;交流同步电机驱动不同于直流电机和交流异步电机,双电机不允许有转速差,因此电机力矩传递方式设计很重要;采用同步电机驱动,耗能制动成为流速仪检定车制动的优先选择,为此要对检定车进行同步电机驱动设计。
1 检定车驱动方式选择
流速仪检定车的运行过程负载一般变化很小,调速没有快速往返要求,但要求在检定段有精确和稳定的车速,并要求车速恒定不变,在一定范围内能够实现无级变速。
1.1 直流电机
就直流电机的励磁方式而言,直流电机分为串励和并励 2 种基本类型,复励电机既有串励绕组又有并励绕组,电机特性介于串励电机与并励电机之间,几种励磁方式电机的转速特性如图 1 所示。图中 n 为电机转速,M 为负载转矩。

图1 直流电机转速与转矩特性关系
由于串励电机的转速随负载转矩的增大而迅速下降,不符合检定过程中恒转速的要求。
并励电机的机械特性为[1]

式中:Uα为电枢电压;Rα为电枢电阻;Ce为电势常数;φ 为磁通;CM为扭矩常数。
并励电机的机械特性在 Rα很小时接近于水平线,但 Rα不可能为零,电机的转速仍受转矩的影响,要得到真正的恒转速还需要对转速进行反馈控制。
1.2 交流异步电机
异步电机的机械特性为 n=ƒ (M),特性关系如图 2 所示,图中 ns为同步转速,nk为临界转速。
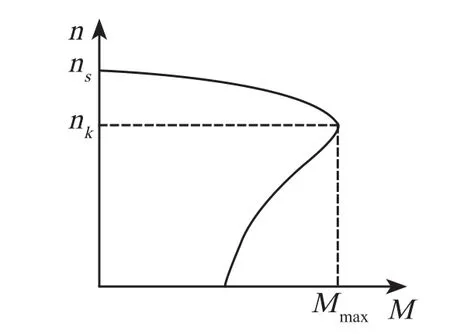
图2 异步电机转速与转矩特性关系
当电机转速低于 nk时,转速随转矩的变化而迅速变化;当转速高于 nk时,转速随转矩的变化较小,但转速仍随负载转矩的变化而变化,要想得到恒转速还需要进行速度的反馈控制。
1.3 交流同步电机
交流同步电机的转速公式为

式中:p 为电机极数;ƒ 为电源频率。
式(2)中的可变参数只有 ƒ,因此,对同步电机进行平滑地调速只能采用变频方式,影响同步电机转速稳定性的参数也只有 ƒ,负载的变化对同步电机的稳态转速没有影响。只要控制供电电源的基波频率就可以方便地控制同步电机的转速。控制同步电机供电频率一般采用变频器(也称逆变器),变频器控制的同步电机是一个开环系统,它没有信号反馈到与变频器输出频率有关的基准振荡器上,所以没有通常系统的稳定性问题。
因此只有同步电机的转速与负载无关,属于恒转速型电机,不需要进行速度反馈控制,故流速仪检定车的驱动方式选择交流同步电机。
2 变频器选择
在变频调速中,除电机本身的结构与性能对调速质量有影响外,变频器的性能直接影响调速质量。
2.1 变频器输出波形
除变频器的频率精度和稳定性影响调速质量外,变频器的输出波形也影响调速质量。如果变频器的输出波形为方波,同步电机就完全成了步进电机。步进电机有精确的平均速度和位置精度,但转速是脉动的,特别在低速时,这种脉动更为明显。
为降低电机的脉动转矩,应使变频器的输出波形尽可能接近正弦波,即调制正弦波,如图 3 所示。
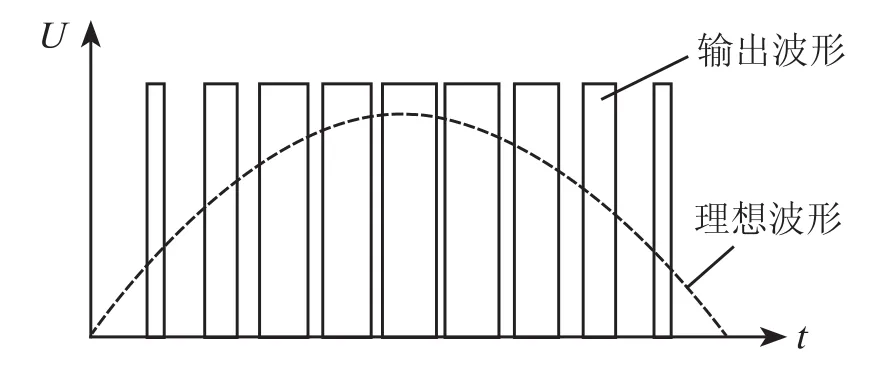
图3 变频器输出波形与理想波形
变频器输出电源的波形是脉宽调制正弦波(PWM),交流电机的定子线圈是感性元件,能够对变频器输出电源的谐波起到滤波作用,使电机的电流接近正弦波,调制频率越高滤波效果越好。
2.2 转速脉动
由于变频器输出电源的波形是脉宽调制正弦波,并非连续波形,电机会存在一定转矩脉动。通过实验发现,这种脉动在频率低和电机转动惯量小时尤为突出。
当同步电机用非正弦波电源供电时,电源的高次谐波使电机产生寄生转矩,这时电机相当于受到强迫振荡。在强迫振荡时电机的转矩为

式中:M0为恒转矩;Mi为 i 次谐波转矩幅值;ωs为同步角速度;φi为 i 次谐波相位角;t 为瞬时时间 。
为简化分析,忽略电机的异步和同步转矩分量的影响,只考虑惯性转矩的影响。
转矩的平衡方程为

式中:∆ ω 为转动脉动;J 为电机的转动惯量;Mi为转矩脉动分量的幅值。
从式(4)可以看出,同步电机的转速脉动与ωs、J 和 i 成反比,与 Mi成正比。
经过分析总结,变频器在设计使用时,要考虑以下几点:
1)在使用脉宽调制变频器对同步电机调速时,尽可能使电机工作于高转速,因为提高 ωs可以降低∆ ω ;如必须在低转速下调速,可以用机械方式减速后再调速。
2)电机的当量转动惯量 J 由于受电机结构和检定车总质量的限制,不能随意加大,但在低速运行时检定车消耗的功率小,可以用给电机加飞轮的方法增加转动惯量。
3)谐波次数 i 取决于变频器的品质,变频器输出的波形是脉宽调制正弦波,调制频率越高,i 就越高,输出波形就越好,电机的电流越接近正弦波。然而变频器的调制频率属于变频器内部参数,一般不对外公布,因此选用变频器时要尽可能了解其调制频率,尽可能选用调制频率高的变频器。
4)脉动的转矩幅值 Mi与变频器的供电电压成正比,降低变频器的输出电压可以降低脉动转矩。当检定车运行于低速时,消耗的功率较低,这时可以降低变频器的输出电压,从而降低转矩脉动。
3 电机传动方式确定
电机驱动检定车时希望能将动力均匀地分配给检定车对称的 2 车轮,以减小检定车对轨道产生的扭矩。
如果将检定车的对称 2 车轮固定在 1 根轴上,并用 1 个电机直接驱动该轴,这种方法显然不行,因为检定车在导向机构的作用下必须走直线,同时同一根轴上的 2 个车轮直径不可能完全一样,即便开始时直径非常接近,经过若干时间的使用磨损就可能使 2 车轮直径大小不一,这样会引起某个车轮打滑或跳动,使检定车的运行稳定性变差。
如果是直流或异步电机驱动,可以用 2 个相同的电机分别驱动检定车的对称车轮,因为 2 个电机之间允许有转速差,当 2 车轮直径不一样时,靠 2 个电机的转速差保持 2 车轮前进速度的一致。全国现有的流速仪检定车包括海流仪检定车和船模实验车均采用此方法。
当用同步电机驱动检定车时就不能采用 2 个电机分别直接驱动 2 车轮了,因为同步电机的转速必须严格地与电源基波频率保持同步,2 个电机之间不允许有转速差。
3.1 差速器传动
用差速器可以将转速均匀地分配给检定车对称的 2 个车轮。差速器的结构如图 4 所示,图中 Z1和Z2为驱动伞齿轮,Z3和 Z3' 为行星伞齿轮,Z4和 Z5为变速齿轮。

图4 差速器驱动示意图
由于检定车有导向走直装置,设检定车速度为ν,那么:
式中:ω1,ω2分别为车轮 1 和 2 的角速度;ω3为行星轮的角速度;D1,D2分别为车轮 1 和 2 的直径。
当 2 车轮直径一样时,ω1=ω2=ω3;
当 2 车轮直径不一样时,如 D1>D2时,ω1<ω2,反之 D1< D2时,ω1>ω2。
采用差速器配合导向轮,检定车可以完全按照导向轮限定的方向走直线,能够保证 2 车轮前进速度一致,并且没有车轮打滑跳动的现象。
差速器传动是汽车车轮驱动的主要方式,采用差速器传动的方案已在国内流速仪检定车上得到验证,检定车走直效果非常显著,完全能够满足流速仪检定车直线驱动的要求。
3.2 圆锥车轮传动
用圆锥车轮也可以使检定车在 2 轨道间走直线,驱动示意图如图 5 所示。
同一轴上的 2 个车轮采用圆锥形结构,在直线轨道上运行的 2 个圆锥车轮能够自动调整,使圆锥车轮与轨道接触的位置始终保持车轮半径一致。
如果车轮 1 的速度比车轮 2 快,检定车就会往车轮 2 的方向转弯。转弯使得车轮 1 远离轨道,车轮 1 与轨道接触的半径变小,车轮 1 的速度减慢。而车轮 2 接近轨道,车轮 2 与轨道接触的半径变大,车轮 2 的速度加快。反之亦然,直至 2 车轮的直线速度一致。
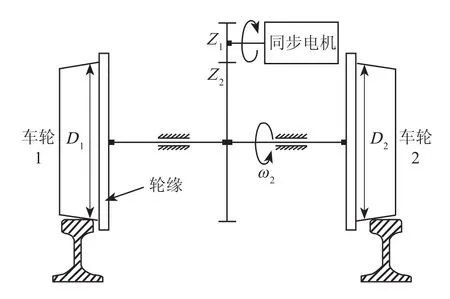
图5 圆锥轮单电机驱动示意图
采用圆锥车轮结构,检定车省去了差速器和导向轮,但轮缘与轨道之间必须留有空隙,微观上检定车是在 2 轨道之间游走的。
圆锥车轮结构的检定车可以采用 2 个同步电机分别驱动 2 个车轮,驱动示意图如图 6 所示。2 个同步电机采用相同的型号(或者相同的运行参数),并接在同一个交流电源上,运行时 ω1=ω1',齿轮 Z1=Z1',Z2=Z2',因此 ω2=ω2'。由此也可以看出,同步电机相当于电轴,保证相关的转轴转速一致。
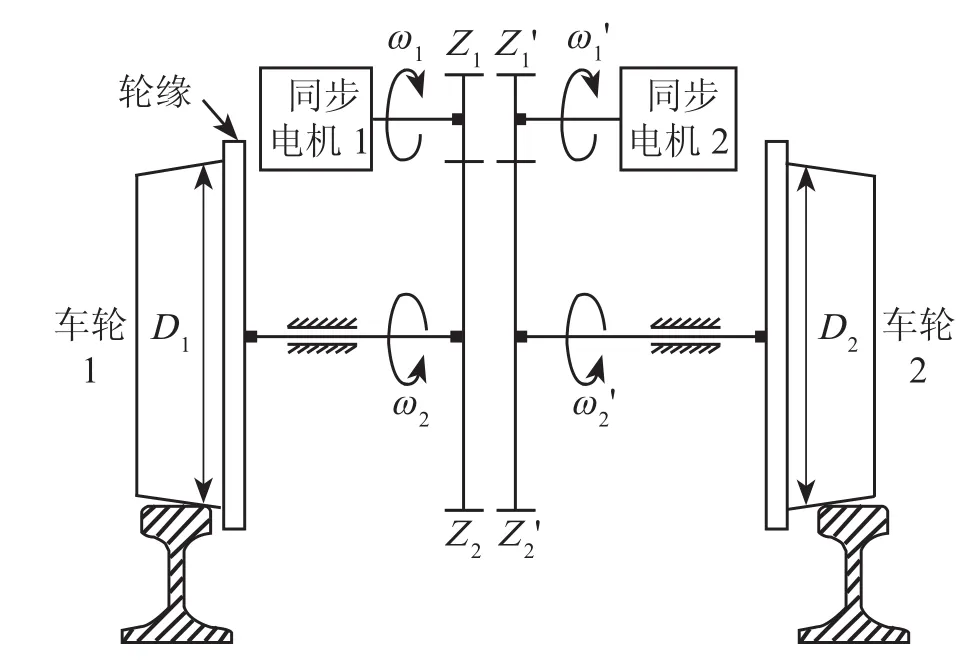
图6 圆锥轮双同步电机驱动示意图
圆锥车轮走直原理是火车采用的方法,简单有效。流速仪检定车的走直原理与火车走直原理完全一样,检定车的轨道甚至直接使用火车铁轨,因此流速仪检定车完全可以借用火车圆锥轮走直原理。
为保证流速仪检定车能走直线,根据行业标准SL/T 150-95《直线明槽中转子式流速仪的检定方法》规定,导向方式应采用单轨导向轮,以保证检定车沿规定直线运行[4]。该规定是根据当时全国流速仪检定车的现状制定的,但当时全国流速仪检定车几乎全部采用直流电机驱动,基本没有交流电机驱动。如果采用同步电机驱动,同时必须严格遵循标准要求,只能采用差速器方案;如果允许对标准灵活掌握,则可以考虑圆锥车轮方案。
4 耗能制动距离估计
检定车轨道分为缓冲段、加速段、稳定段、有效段(检定段)和减速段,其中缓冲段、稳定段和有效段可以根据标准确定,也可以根据经验确定;加速段可以根据加速度公式确定;减速段耗能制动距离没有现成公式可供借鉴,因此只有给出耗能制动数学模型才能精确计算耗能制动距离,才能精确计算减速段的长度。
4.1 耗能制动数学模型
耗能制动没有机械摩损,制动平稳,正常制动应当采用耗能制动。耗能制动的方法如下:制动时,电机转子继续加上励磁(如果是永磁转子则无需励磁),定子绕组与变频器断开,同时将 3 个电阻接在定子绕组上,此时同步电动机便成了同步发动机。制动时允许电机在过载情况下运行。

电机产生的制动力为式中:Fm为制动力;U 为电机的输出电压;P 为耗能功率;R 为每相的耗能电阻;ν为检定车速度;

把式(7)代入式(6)得:

检定车受到的阻尼力 FC=Cνν,检定车受到的摩擦力 Fμ=m g µ,
式中:Cν为阻尼系数;m 为检定车质量;g 为重力加速度;µ 为摩擦系数。
则制动合力为制动微功:


式中:L 为制动距离;WL表示在制动距离为 L 时的制动微功。
检定车的动能增量:dWν=-mνdν,
由于 dWL=dWν,

式中:Pn为电机的额定功率;k 为过载系数。
把式(12)代入式(11)可得耗能制动距离的最终公式:

式(13)中,ν 由设计要求确定,ν0一般为 0,m 由检定车的结构和材料确定,Pn由检定车的加速功率和过载系数确定,Cν和 µ 由实测或经验确定,唯一能够人为改变的只有减速过载系数 k。
在加速段,同步电机是同步电动机,同步电动机的过载系数不宜过大,过大的过载系数容易造成同步电动机失步。在减速段,同步电机是同步发电机,耗能制动的同步发电机不存在失步问题,因此可以取较大的的过载系数。制动过载系数越大,制动距离越短,增大制动过载系数的方法是减小耗能电阻,但要注意不能造成同步电机过热,不能造成检定车的车轮与轨道打滑。
4.2 应用举例
某流速仪检定车耗能制动的实例计算如下:检定车从ν0=5 m/s 制动到停止,并且取 k=2.5,Pn=12 kW,Cν=80 kg/s,µ=0.01,代入式(13)求出制动距离为 L=6.971 m。
与实测耗能制动距离比较证明,实际的耗能制动距离与计算结果非常吻合,实际应用时可根据此耗能制动模型计算减速段长度。
5 结语
采用同步电机驱动流速仪检定车,可以得到理想效果,因为同步电机的稳态转速不受负载变化的影响,因而可以保证流速仪检定车的速度稳定,同时同步电机变频调速是开环系统,没有闭环系统的时间响应和系统稳定性问题。
采用同步电机驱动流速仪检定车,避免了负载变化对车速的影响,因此对检定车轨道的要求也将大大降低。实验证明,在轨道突变高差达 2 mm 的情况下,同步电机驱动的流速仪检定车的速度稳定性完全在行业标准《直线明槽中转子式流速仪的检定方法》[4]控制范围之内。
虽然同步电机驱动仅在个别流速仪检定车上实际应用,但实测结果表明其各项关键指标均优于直流电机或交流异步电机驱动的流速仪检定车。其中最显著的特点是,低速没有爬行,任何速度段的瞬时速度都是稳定的(直流电机或交流异步电机驱动的流速仪检定车仅平均速度稳定),对轨道高差几乎没有严格要求,能够容易实现平稳的耗能制动。
由于同步电机驱动流速仪检定车属于新技术新设备的应用,可能会涉及到某些参数与行业标准不匹配的问题,但基本上都是同步电机驱动对配套保障的要求大大低于标准的规定,例如对轨道的高差要求大大降低,而流速仪检定车的稳定性远远高于标准的规定。如果同步电机驱动技术得到推广,今后流速仪检定车的相关标准将可以大大降低对轨道的要求,同时对测速稳定性的要求可以大大提高。
[1] 汤蕴谬,史乃,沈文豹. 电机理论与运行(下册)[M]. 北京:水利电力出版社,1984: 205.
[2] 汤蕴谬,史乃,沈文豹. 电机理论与运行(上册)[M]. 北京:水利电力出版社,1984: 330.
[3] 藏英杰,吴守箴. 交流电机的变频调速[M]. 北京:中国铁道出版社,1984: 227.
[4] 水利部机械局. SL/T 150—95 直线明槽中转子式流速仪的检定方法[S]. 北京:中国水利水电出版社,1995: 350-351.
Driver Design of Synchronous Motor in Current Meter Calibration Trolly
JIN Yuhong1,2, CHU Zefan1,2, GU Qian3
(1. Nanjing Automation Institute of Water Conservancy and Hydrology, the Ministry of Water Resources, Nanjing 210012, China;
2. Hydrology and Water Resources Monitoring Engineering Technology Research Center, the Ministry of Water Resources, Nanjing 210012, China;
3. College of Computer and Information Engineering, Hohai University, Nanjing 210098, China)
As the appearance of new material and new equipment, it is possible that current meter calibration trolly is driven by using AC asynchronism or synchronous motor. The article expounds the reasons of current meter calibration trolly using synchronous motor frequency converter driven, for analyzing the factor of choosing frequency converter detailedly, methods of allocating pulley torque, estimation of the motor power and calculation of the distance of energy consumption braking under the driving of synchronous motor, for providing a reference of popularizing and using of the transfer of synchronous motor frequency converter driven.
synchronous motor; drive; current meter calibration trolly; frequency converter; energy consumption braking
P335
A
1674-9405(2015)02-0049-06
2013-12-23
金玉虹(1962-),女,江苏南京人,工程师,从事水利信息化管理工作。
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
防爆电机(2020年6期)2020-12-14
小读者(2019年24期)2020-01-19
汽车观察(2019年2期)2019-03-15
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
光学精密工程(2016年3期)2016-11-07
发明与创新·中学生(2016年7期)2016-05-14
舰船科学技术(2015年8期)2015-02-27
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01