
基于VxWorks 的喷水桁杆控制系统设计
2015-01-02 12:10创新者段世梅
中国科技信息 2015年4期
创新者:段世梅
针对喷水桁杆控制系统对采集信号、数据处理、控制律解算及信号发送等强实时性、稳定性的要求,传统的软硬件结构已经不能满足系统性能指标的要求,因此需要选用一个新的开发平台,来满足系统的设计要求。本文选用了嵌入式操作系统VxWorks 为开发平台,对喷水桁杆控制系统的软硬件进行了设计,并对设计的系统进行了测试。测试证明,该系统具有较强的实时性与稳定性,满足了系统开发者的要求。
飞机的结冰试验,对于研究飞机结冰的相关性能十分关键。而在国内,没有相应的喷水结冰试验设备,需要远赴加拿大进行相关试验。为了改变国内喷水结冰试验现状,需要研发一套空中喷水作业系统。喷水桁杆控制系统是空中喷水作业系统的重要组成部分,需要控制电动绞车和小翼协调工作,使桁杆能稳定收放,并能稳定在设定角度进行喷水作业。对空中出现的各种紧急情况能快速做出响应,因而要求控制系统必须有较强的实时性。
美国风河(Wind River)公司开发的VxWorks 嵌入式实时操作系统采用Wind 微内核设计减少了系统开销,从而保证了对外部事件的快速反应,提高了实时性和可靠性。
本文基于VxWorks 实时嵌入式平台,对系统功能进行了分析,对系统的硬件平台进行了搭建,对系统的软件结构和流程进行了设计,并对设计的系统进行了测试。测试证明,该系统具有较强的实时性与稳定性,满足了开发者的要求。
系统总体设计
桁杆安装在某型飞机货舱门外,小翼安装在桁杆后端,如图1 所示。喷水时,控制小翼使桁杆保持设定角度;收放时,控制小翼使钢索的张力在设定范围内。
系统功能分析
对系统进行功能分析,系统主要功能包括采集各类传感器信号、接收GPS 信息、对小翼的控制、对电动绞车的控制、各种信号进行处理、控制律解算、并有监控和显示功能。喷水桁杆控制系统主要由控制台、控制计算机、显示计算机、前舱显示器、控制面板、摄像头、各类传感器、GPS 模块、控制手柄、电动绞车、上位锁和电动舵机组成,系统总体结构如图2 所示。
系统工作原理
操作人员操作控制面板,控制计算机给绞车发送正转指令,绞车正转带动钢索放下桁杆;在桁杆下放的过程中,控制计算机采集传感器信号并进行控制律解算,并将结果发送舵机带动小翼偏转,以达到稳定放下桁杆的目的。
当桁杆放到设置角度时,控制计算机自动向绞车发送停转信号;此时,操作人员操作控制面板,使系统进入保持模态;控制计算机采集传感器信号并进行控制律解算,并将结果发送舵机带动小翼偏转,以达到保持桁杆角度稳定的目的。系统同时引入杆头振动加速度和钢索张力,作为监控使用。系统在保持模态下进行喷水作业。
喷水工作完成后,操作人员操作控制面板,绞车反转收起桁杆。当桁杆紧贴舱门时,上位锁上锁,锁住桁杆。
显示计算机连接3 个摄像头,实时监控桁杆系统的工作状态。在系统整个工作过程中,相关参数和监控视频都显示在显示计算机的显示器上,供操作人员观察判断。
硬件平台
控制计算机是喷水桁杆控制系统的核心,为了保证系统的实时性,采用VxWorks 实时操作系统为开发平台。显示计算机采用嵌入式图像处理系统,操作系统采用WindowsXPE。喷水桁杆控制系统的全部硬件连接图如图4 所示。

图1 某型飞机尾部桁杆示意图

图2 喷水桁杆控制系统结构图
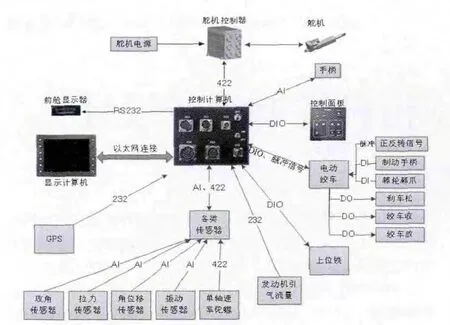
图3 喷水桁杆控制系统硬件连接关系图
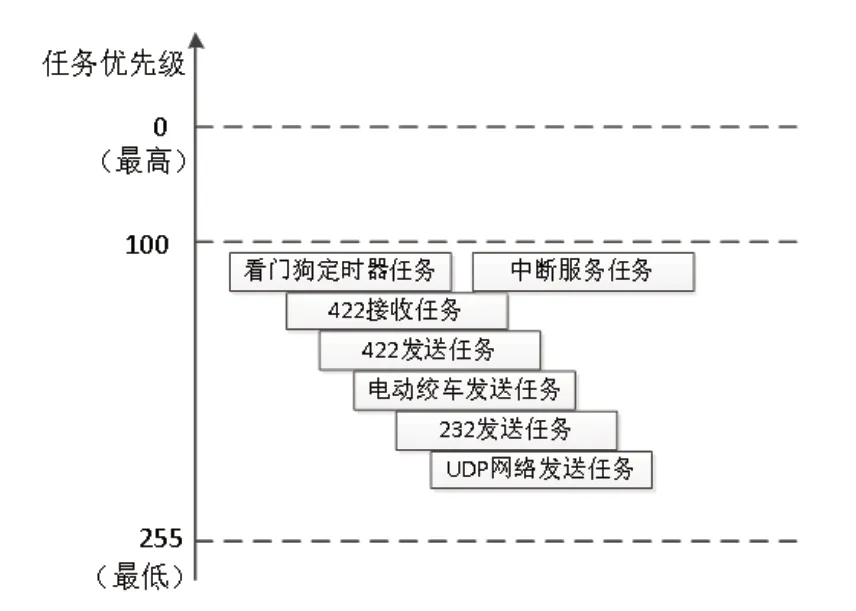
图4 喷水桁杆控制系统任务优先级划分
软件设计
基于优先级的任务划分
按照任务优先级高低划分为7 种任务,如图4 所示。
看门狗定时器任务,该任务中实现的功能有采集模拟量和离散量,对各种传感器信号进行处理(数据类型有模拟量、离散量、脉冲信号422)。
中断服务任务(响应GPS 秒脉冲);
422 接收任务,该任务接收角速率传感器信号、舵机状态信息;
422 发送任务,该任务发送控制指令给舵机;
电动绞车发送任务,该任务发送离散量控制信号给电动绞车;
232 发送任务,该任务发送显示信息给前舱显示器;
UDP 网络发送任务,该任务发送各类参数给监控计算机监控用。
主任务流程设计
控制软件主程序流程如图5 所示。系统上电,开始初始化,初始化完成,若不结束,等待看门狗定时器释放信号量(10ms 释放一次),若信号量释放,则程序主循环执行。接收模拟量和离散量数据,并对数据进行测量噪声滤波等处理,然后进行控制律解算,把解算结果发送给舵机。若程序执行不结束,则进入下一轮的看门狗信号量释放等待。

图5 控制软件主程序流程图
系统测试
对完成的系统进行测试和验证,主程序设置成10ms执行一次。在Tornado 中查看系统的各个任务运行状况,可以看到主程序(看门狗定时器控制的任务)能保证10ms 执行一次,看门狗定时器控制的任务实际开销不到5ms。看门狗的定时精度小于1tick(在本系统中代表1ms)。
结语
针对喷水桁杆控制系统的特点,采用了嵌入式操作系统VxWorks 为开发平台,对系统功能进行了分析,对硬件平台进行了搭建,对软件进行了基于优先级的任务划分和流程设计,并对设计的系统进行了测试。测试证明,该系统具有较强的实时性与稳定性,满足了开发者的要求。
猜你喜欢
动漫界·幼教365(小班)(2021年4期)2021-05-23
山西电子技术(2021年1期)2021-02-05
阅读(高年级)(2019年10期)2019-12-13
学苑创造·A版(2018年5期)2018-05-28
中学生百科·小文艺(2017年7期)2018-02-07
北京航空航天大学学报(2017年12期)2017-04-23
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年24期)2016-11-14
小学生·新读写(2015年2期)2015-06-10
小学生作文选刊·低年级版(2014年11期)2014-11-21
