
基于图像处理的海面动目标DP相参检测方法
2015-01-01 03:18纪瑞东王长宇
现代雷达 2015年6期
纪瑞东,王长宇
(沈阳飞机工业(集团)有限公司, 沈阳110850)
0 引言
检测具有一定运动速度的海面目标,如小型快艇、运动的潜望镜等,称为海面动目标检测,是机载对海搜索雷达的重要任务之一。由于易受海杂波虚警影响,采用常规的非相参处理检测这类目标时效果不佳。类似的地面动目标检测,如坦克车等,已有多种成熟技术,如双接收通道干涉技术、采用运动补偿的DPCA技术[1]、多接收通道的 SAR-GMTI技术[2]和 STAP-GMTI技术等。由于海杂波形成的复杂背景,这类技术还未在对海搜索雷达中有过成功应用[3]。文献[4]认为动目标的回波信号可以近似建模为线性调频信号(LFM),文献[5-6]基于分数阶傅里叶变换(FRFT)对动目标的检测进行了理论分析和仿真验证,但实际海面动目标的切向和法向速度较小,线性调频参数特征不明显且估算困难,加之FRFT运算量较大,需进一步研究方可实际使用。
低重复频率的DP(Doppler Processing)处理是一种检测海面动目标的有效方法,在美军的对海搜索雷达(137、143系列、Sea Vue)中广泛应用。由于传统的主杂波跟踪、凹口技术等在处理海杂波时会遇到困难,未被消隐的杂波会形成大量虚警或降低部分清晰区的检测能力,因而在陆海杂波联合分布时会严重影响检测结果。
针对上述问题,本文提出了一种基于图像处理的DP相参处理方法,介绍了方法的参数设计,分析了海杂波以及陆海杂波在二维频谱上的分布特性,详细阐述了基于图像处理技术的动目标检测过程和方法,最后用实测数据验证了该方法的性能和可实现性。
1 海杂波背景特性分析
1.1 海面动目标检测方式
海面动目标检测的主要对象是海面低速运动的目标,由于这类目标的速度通常在10节~35节(1节=1.852 km/h),需要选择低重复频率,一般取1.5 kHz~5.0 kHz。为了保证检测性能,需要积累足够的脉冲数和一定扫描的速度,这使得对海动目标检测选用重频数较少,一般选用2/3或2/4检测准则。
1.2 海杂波的距离频率维特性
风速、风向、温度、洋流、海水成分以及陆地等都会引起海洋的复杂运动,因此海表面对雷达来说是一个动态的、不断变化的平面[7],在距离频率二维分布上体现了一定的无规律性。图1为海杂波经DP处理后,距离频率二维平面显示的结果。从图中可以看出:
1)海杂波的幅度较低。经统计,比同等条件下的地杂波低约15 dB~20 dB,强目标在海杂波区内清晰可见。
2)海杂波所占频率维单元数约为地杂波1.5~2.5倍。由于采用低重复频率,频率维高度折叠,距离维模糊度低。
3)海杂波中心出现的频率单元无明显的统计规律。在离海岸较远的海区,海杂波形状较为规则,如图1a)所示,可以近似认为关于某个频率单元对称。当受到陆地影响时,会产生形变,如图1b)所示。

图1 低重复频率下海杂波二维频谱图
当主波束同时照射到海面和陆地即海陆联合分布时,情况将更为复杂,如图2所示,图中7~16号频率单元内为地杂波,16~32号频率单元为海杂波。
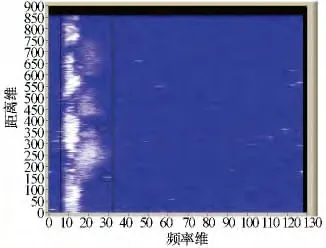
图2 陆海杂波二维频谱图
2 基于图像处理技术的海面动目标检测
由于海杂波出现频率范围的无规律性和海陆杂波的复杂性,使得海杂波的中心频率和宽度无法根据经验公式估算和修正,同时杂波区域的边界不规则,使得基于频率维的凹口设计较为困难。因此,传统杂波跟踪算法不能形成准确凹口,即使形成凹口也会损失部分清晰区,图2中圈出的目标将与杂波一起被消隐。
如果从一幅图像的角度理解二维频谱图,可以将杂波区定义为需要提取的特殊区域,出现在可检测区的目标定义为“噪声”,利用图像处理技术中的边界提取方法从频谱图中剔除杂波,获得最大清晰区,从而提高对海搜索雷达对海面动目标的检测能力。
2.1 数字图像处理技术
图像处理技术最早出现在20世纪50年代,目的是改善图像质量,提高视觉效果。随着其不断发展,已广泛应用于航空航天、工业检测和军事制导等领域[8]。图像的分割提取是数字图像处理技术的一个研究方向,作用是从图像中提取某些特定的信息。在海杂波二维频谱处理中,就是利用图像提取技术将杂波区和清晰区分开。
2.1.1 二值化
二值化目的是从图像中把目标区域(杂波区)和背景区域(清晰区)初步分开。如何选取阈值达到有效的分割效果,是二值化处理的关键,常用的方法有平均灰度值法、类别方差法和最大熵法。后两种方法虽效果良好,但计算量相对较大。由于杂波和噪声的对比度较强,工程上常选择计算简单的平均灰度值法,取所有像素(距离单元和频率单元)幅度值的平均值为二值化阈值,但是清晰区的噪声方差大,平均灰度值法会带来大量“噪声”,增加后续计算负担。
由二维频谱图形成的机理可知,当雷达某些处理参数设定后(例如积累脉冲数、信号带宽等),杂波图的噪声符合一定的统计规律,而波束指向、发射功率、增益控制和海情等因素影响杂波的表现特性,无明显的统计规律。二值化的阈值可以由二维频谱图的幅度统计得到,如图3所示。
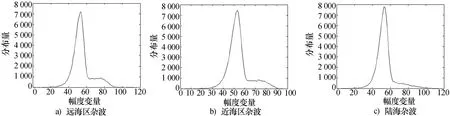
图3 二维杂波图的幅度分布统计
图3是将图1和图2中三组数据的二维频谱图所有点幅度统计的结果。将三组数据针对0至最大值(所有三组数据中的最大值)等分统计,横坐标表示等分间隔,纵坐标表示出现的个数。可以看出:由于三组数据的雷达处理参数一致,噪声统计规律相关性强。三组数据不同的是杂波统计,第62~120号等分间隔。门限则选择在噪声和杂波统计的分界点处,如图中第62个等分间隔。
2.1.2 sobel算子边界提取
sobel算子是一种优化的梯度算子,利用图像的一阶导数来提取边界,它是一组3×3、5×5或是7×7的矩阵,阶数越高边界提取越精细,计算量也越大。本文选择5阶算子,包括8个子矩阵,表示8个方向上的梯度计算参数,如图4所示。
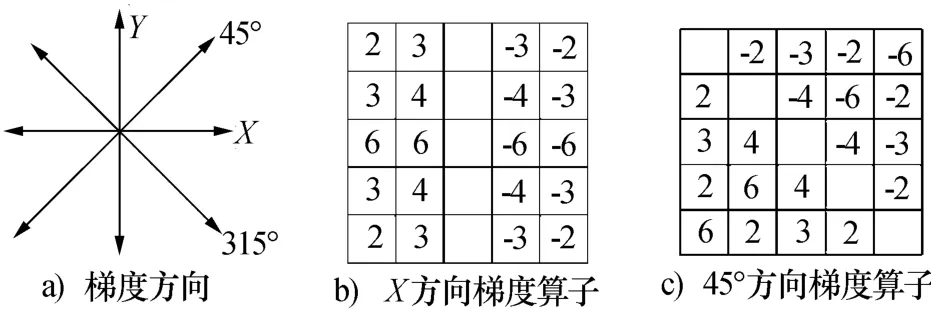
图4 5阶sobel算子
计算频谱图中某点的梯度表达式为

2.1.3 去“噪声”
在梯度矩阵中,被称为“噪声”的目标、虚警与杂波边界点一样会出现大值,需要剔除。常用的图像去噪方法有平滑滤波法、中值滤波法、自适应滤波法等。利用模板进行平滑滤波,虽然对图像边缘有一定的损害,但因其去噪方法原理简单,计算量和存储量都较小,被广泛使用。由图1、2中可以看出,目标在频率维成短线状出现,而杂波则以片状、块状出现,利用平滑滤波模板计算均值,均值数值的大小差异即作为剔除“噪声”的标准。具体做法是,取N×N模板在图像中滑动,计算模块中单元格幅度均值,大于门限的保留,小于门限的除去。
2.1.4 边界细化
梯度矩阵中边界的梯度值连续变化,显得模糊不清,需使用合适的阈值细化,保留梯度局部大值。假设grads(r,f)表示某点梯度值,max(r,f)表示(r,f)规定邻域内最大值,k为控制系数,利用邻域最大值和控制系数对该点进行取舍,得到细化目标。细化结果计算表达式如下

在实际应用中,邻域一般取点(r,f)周围的8个点,k一般取0.7~0.9。
2.2 方法的实现
基于图像处理的海面动目标检测具体实现流程如下:
1)脉压处理,相参积累,FFT后得到二维频谱图。
2)对二维频谱图所有点进行分布统计,选择二值化阈值。选择的阈值可以在雷达处理参数不变的情况下继续使用。
3)二值化处理,取-100和100为二值标准。
4)去“噪声”处理和边界提取处理,使用阶数为5的sobel算子和平滑滤波模板,在边界提取输出时增加平滑滤波的判断,模板平滑值大于0,则作为边界点梯度输出,否则作为“噪声”剔除。
5)边界细化处理。处理后杂波区的边界更加明显。普通PD处理的频率维凹口变成了距离维函数,针对每一个距离单元都存在一个凹口的左右边界。因为图像处理过程的损失,实际使用凹口时,边界值需要放大几个频率单元,以确保杂波被消隐。
6)在清晰区作CFAR处理,检测出目标。
3 实测数据分析
按照上述方法,对图2进行处理,得到如图5所示的过程结果图。
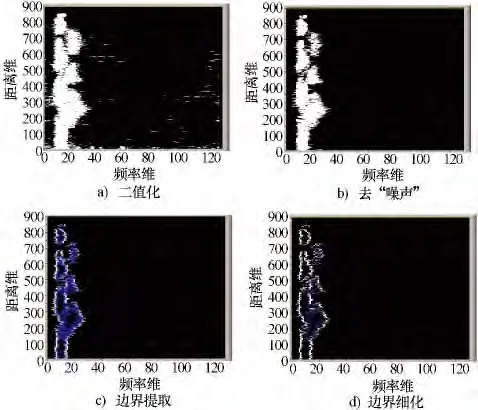
图5 对二维频谱图进行图像处理的过程结果图
图5中分别显示的是二值化、去“噪声”、边界提取和边界细化四个步骤的处理结果。经过图像处理后的二维频谱图,杂波区和清晰区被较准确的分开,图2中圈出的目标将在清晰区中被检测出,以增强检测能力。
4 结束语
将二维频谱图视为一种图像,利用图像处理的边界提取方法区分杂波区和噪声区,提高PD处理的检测能力,是PD处理用于海面动目标检测的一种有效途径。本文对海杂波的二维频谱特性进行了分析,详细阐述了图像处理用于海面动目标检测的算法,并通过实测数据进行了仿真验证。而如何精简算法和提高边界提取的精度,仍是需要进一步研究的问题。
[1] 沈明威,朱岱寅,朱兆达.和差波束频域自适应DPCA技术研究[J].现代雷达,2010,32(4):59-62.Shen Mingwei,Zhu Daiyin,Zhu Zhaoda.A study on ΣΔADPCA technique in frequency domain[J].Modern Radar,2010,32(4):59-62.
[2] 吕孝雷,齐飞林,邢孟道,等.三通道SAR-GMTI地面快速目标检测[J].系统工程与电子技术,2009,31(7):1581-1587.Lü Xiaolei,Qi Feilin,Xing Mengdao,et al.Ground fast moving target detection based on trichannel SAR-GMTI[J].Systems Engineering and Electronics,2009,31(7):1581-1587.
[3] Gorski T,Le Caillecy J M,Lecornu L,et al.Space-time adaptive processing analysis for the moving target on the sea surface indication purpose[C]//2006 International Conference on Microwaves,Radar and Wireless Communications.Krakow:IEEE Press,2006:199-202.
[4] Sun H B,Liu G S,Gu H.Application of the fractional Fourier transform to moving target detection in airborne SAR[J].IEEE Transactions on Aerospace and Electronic Systems,2002(38):1416-1424.
[5] 杜文超,王国宏,孟小芬.基于分数阶傅立叶变换估计径向加速度算法研究[J].信号处理,2009,25(3):472-477.Du Wenchao,Wang Guohong,Meng Xiaofen.A method to estimate radial parameters of target based on FRFT[J].Signal Processing,2009,25(3):472-477.
[6] 陈小龙,关 键,于仕财,等.海杂波背景下基于FRFT的多运动目标检测快速算法[J].信号处理,2010,26(8):1174-1180.Chen Xiaolong,Guan Jian,Yu Shicai,et al.A fast detection algorithm of multiple moving targets in sea clutter based on FRFT[J].Signal Processing,2010,26(8):1174-1180.
[7] Skolnik M I.Radar Handbook[M].2nd ed.NewYork:The McGraw-Hill Company,2002.
[8] 邓继忠,张泰岭.数字图像处理技术[M].广州:广东科技出版社,2005.Deng Jizhong,Zhang Tailing.Digital image processing technology[M].Guangzhou:Publishing House of Guangdong,2005.
猜你喜欢
作文新天地(小学版)(2022年8期)2022-05-30
科学与信息化(2021年30期)2021-12-24
红蜻蜓·低年级(2021年2期)2021-07-20
小学科学(2020年6期)2020-06-22
喜剧世界(2017年5期)2017-12-06
小学生导刊(2017年18期)2017-05-17
红蜻蜓·低年级(2017年2期)2017-03-29
喜剧世界(2016年17期)2016-11-26
喜剧世界(2016年3期)2016-11-26
西北工业大学学报(2015年3期)2015-12-14
