
太阳能光伏追踪控制系统的研究
2015-01-01 02:27傅明星
机械工程与自动化 2015年5期
王 瑜,傅明星
(陕西理工学院 机械工程学院,陕西 汉中 723003)
0 引言
能源问题在当今世界已经成为社会关注的一个焦点问题,然而地球上所采集的太阳能非常巨大,照射在地球上约40min的太阳能便可供全球人类一年的能量消费,所以太阳能是取之不尽、用之不竭的能源[1]。而且太阳能绝对绿色、环保,可再生而且分布广泛,因此太阳能具有非常广阔的利用前景,被誉为最理想的能源之一[2]。通过对太阳运动规律的解读,本文阐述了改进光伏跟踪系统的机械结构部分、控制部分及其控制原理、系统整体软件的设计,从而提高了太阳能光伏自动追踪控制器系统的太阳能利用率。
1 光伏跟踪系统方案及框架思路
1.1 太阳运动的规律
地球极轴和黄道天球极轴存在一个23°27′的夹角,引起了太阳赤纬角在一年中的变化。冬至时这个角为-23°27′,并逐渐增大;而到春分时变为0°,并继续增大;夏至时赤纬角最大为23°27′,并开始减小;而到秋分时赤纬角又变为0°,并继续减小,直到冬至,另一个变化周期开始[3]。太阳的方位角随时间在不停地变化,具体规律如图1所示[4],图中α为高度角,γ为方位角。
1.2 方案设计
目前,太阳追踪方式很多,比如时钟式、程序控制式、压差式、控放式、光电式及用于天文观测和气象台的太阳跟踪装置[5]。本文研究的太阳能光伏自动跟踪系统是机电一体化设备的典型案例,相比较而言,采用集成度高、体积小、可靠性好、控制功能强和低电压、低功耗、易扩展并且具有优异的性能价格比的单片机控制系统去实现太阳能光伏自动跟踪系统的控制是较好的选择。而基于单片机的太阳自动追踪系统有很多,比较常见的有光电检测追踪方式和视日运动轨迹追踪方式,本文研究的方法是综合两种跟踪方法的优点、改善它们的缺点,并把两者有机地结合起来,采用视日运动轨迹追踪方式和双轴高度角、方位角式跟踪,因为理论上太阳光线的入射角可以为0°,实现全日跟踪,使得系统更加稳定,大大提高了太阳能的利用效率[6]。

图1 太阳位置随时间变化示意图
(1)光电跟踪:常见的光电跟踪是采用一级传感器跟踪方式,该跟踪系统原则上由3大部件组成:位置检测器、控制组件和执行机构(步进电机)。位置检测器主要由性能经过挑选的光敏传感器组成,如光敏二极管、光敏电阻等。控制组件主要接收从位置检测器发来的微弱信号,经放大后送到执行机构,执行机构实为跟踪装置的动作原件[7]。
(2)视日运动轨迹跟踪:视日跟踪是根据太阳在天空中的运行轨迹随着每天的时间和日期的周期性变化得来的,用51单片机来控制跟踪的方案,可以根据太阳角度与时间的对应关系来控制双轴电机驱动系统,从而使得实验板与太阳光线保持垂直[8]。不论是采用极轴坐标系统还是地平坐标系统,太阳运行的位置变化都是可以预测的,通过数学上对太阳轨迹的预测可完成对日跟踪[9]。
综上,从产品可靠性角度以及性价比角度考虑,本设计选择视日跟踪与光电跟踪相结合的方法,在跟踪太阳光线的过程中以时间程序控制为主线,能够自动更正不同时间的位置坐标,跟踪控制线始终维持太阳能板正对太阳,完成精确的太阳定位。
1.3 系统框架
该光伏跟踪系统分机械部分和控制部分。
(1)机械结构主要包括底座、两个电机、两个主轴和太阳能板等。当光线发生偏离时,控制部分发出控制信号驱动两个步进电机分别带动两个轴共同工作实现对太阳的跟踪[10]。理想情况下的太阳能跟踪装置示意图如图2所示。

图2 太阳能跟踪装置示意图
(2)控制部分主要由时钟控制及显示部分、单片机系统和电机驱动电路组成。系统以时间程序跟踪为主线进行太阳能板位置定位,实现对太阳能板的精确追踪[11]。
2 光伏跟踪控制系统工作原理
该装置为双轴跟踪系统,竖直轴可实现方位角的跟踪,水平轴可实现高度角跟踪[12]。机械结构主要包括底座、主轴、齿轮和轴承等。太阳能板采用直板式。
本系统每个模块之间通过核心单元连接,并通过一系列的数据处理得到相应的控制信号,外围驱动将控制器发出的控制信号进行合理的转换,从而带动电机使整个系统运作[13]。整个系统采用了15V和5V两种电源进行供电,其中5V电源是15V电源经过相应的滤波、稳压而形成的,供电电源只需满足电机转动时所需的最大电流,即可保证系统的各模块正常工作。其控制部分原理框架如图3所示。
光伏板的自由度是2,控制机构将分别从东西与南北方向对太阳能板进行调整,将东西方向168.75°划分为若干等分;单片机以DS1302时钟芯片作为计时单元,根据时间等间隔地控制步进电机的旋转,主轴电机步距角为1.8°,采用Tb6560芯片将控制脉冲进行16细分,实现小角度的旋转;设定的时间是从早晨6:00开始跟踪太阳光线,到晚上18:00时沿X轴方向的电机反转到早晨太阳升起的地方,将12个小时划分为1 600个等分,时钟芯片以秒为单位,每隔27s向电机驱动模块发送转动脉冲,使电池板沿X轴方向正向转动一定角度(0.112 5°),如图4所示,使得跟踪更加准确可靠,提高了太阳能的利用效率[14]。
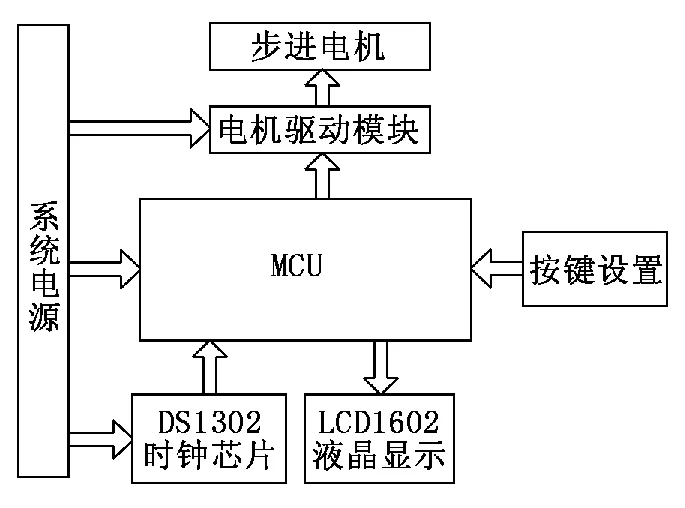
图3 控制部分原理框架

图4 东西方向追踪示意图
3 系统整体软件设计
根据所选系统硬件及机械装置进行了系统软件的整体性设计,软件起始为系统初始化,根据时钟模块所决定的时间大小进行计算,得到本时刻太阳所正对的直射角度,程序通过相应的计算与转化以实现跟踪器的角度对准[15-19]。具体的软件流程图如图5所示。

图5 软件流程图
可见:用时间的方法控制东西方向电机进行正反转控制,进而实现太阳能板对太阳光线跟踪的控制,使得太阳能板能够准确定位。
4 总结
本文所研究的太阳能光伏自动跟踪系统是以51单片机为基础,全过程全方位时间控制为依托,再联合机械装置完成对太阳光线的跟踪,确保了太阳能板始终与太阳光线垂直,完成了跟踪任务。它具有以下特点:
(1)采用51单片机控制,主线以时间控制为主,实现太阳能板位置的按时定位;判断太阳所在的位置并进行跟踪。控制电机的正反转,跟踪精确,实现简单。
(2)机械部分做了一个简易的模型,可以从东西和南北两个方向来确定太阳能板的位置,机械部分的模拟形象且能实现较为精确的太阳能板的定位。
[1] 胡兴军.全球光伏产业的加速发展[J].华通技术,2007,26(3):36-39.
[2] 宁德伟.太阳能设计在民用建筑中的应用探究[J].中华民居(学术刊),2010(11):343.
[3] 许仪泉,王燕昌,王子文,等.赤道坐标系下新型太阳能自动跟踪装置设计[J].机械设计与制造,2013(9):155-157.
[4] 张东煜,宁峰,韩讲周,等.一维驱动二维跟踪太阳自动跟踪系统设计[J].微计算机信息,2006(16):158-160.
[5] 金晶晶.太阳光线自动跟踪装置[D].沈阳:沈阳工业大学,2007:3.
[6] 王东江,刘亚军.太阳跟踪自动化控制系统设计[J].数字技术与应用,2010(7):19-26.
[7] 郭庆云,续明进,张振国.基于GE智能控制平台的太阳能跟踪控制系统设计[J].北京印刷学院学报,2012,20(2):57-59.
[8] 谢磊,刘星.太阳自动跟踪系统的研究与设计[J].科协论坛·下半月,2010(7):91-92.
[9] 夏小燕.大范围太阳光线跟踪传感器及跟踪方法的研究[D].南京:河海大学,2007:2.
[10]孙茵茵,鲍剑斌,王凡.太阳自动跟踪器的研究[J].机械设计与制造,2005(7):157-159.
[11]祖一康,徐妙倩.基于单片机的直流电机控制系统设计[J].黄冈师范学院学报,2012(6):50-52.
[12]张善文,张剑锋,陈思栋.太阳光线双轴跟踪装置的机械系统设计[J].机械工程与自动化,2010(4):91-93.
[13]吴智量,曾巨航,黄山.基于单片机控制的智能室内光强控制系统[J].航空计算技术,2004,34(2):105-108.
[14]张常年,赵红怡.太阳能电池自动跟踪系统的研制[J].电子工程师,2001,27(12):26-27.
[15]Yusie Rizal,Sunu Hasta Wibowo,Feriyadi.Application of solar position algorithm for sun-tracking system [J].Energy Procedia,2013,32:160-165.
[16]Mohamad Mas,Badejani Smm,Ewald F F.Microprocessor-controlled new class of optimal battery chargers for photovoltaic application[J].IEEE Transactions on Energy Conversion,2004,19(3):599-606.
[17]John F Myles,Michael H Nicklas,Louis J Gerics.Tracking solar energy concentrating system having a circular primary and a compound secondary[J].Solar Energy,1998,62(2):47-52.
[18]Luca De Nardis,Maria-Gabriella Di Benedetto.Overview of the IEEE 802.15.4astandards for low data rate wireless personal data networks[C]//4th Workshop on Positioning,Navigation and Communication.Hannover:IEEE,2007:285-289.
[19]ZHANG Kai-ru,MO Lun-Wei,TANG Mei-yu.Research of the wireless management system for solar street lamp based on NanoLOC AVR Module[J].Journal of Measurement Science and Instrumentation,2010,2(1):55-59.
猜你喜欢
科学大众(2022年23期)2023-01-30
中外文摘(2019年8期)2019-04-30
小哥白尼(趣味科学)(2018年4期)2018-06-21
学苑创造·A版(2017年4期)2017-05-13
发明与创新(2016年6期)2016-08-21
创新作文(小学版)(2016年28期)2016-02-28
小天使·一年级语数英综合(2015年8期)2015-07-06
太阳能(2015年12期)2015-04-12
小朋友·快乐手工(2015年1期)2015-03-13
科学启蒙(2014年9期)2014-11-12
