
并联型永磁悬浮系统悬浮特性的实验研究✳
2015-01-01 02:27金俊杰金嘉琦
机械工程与自动化 2015年5期
孙 凤,李 清,金俊杰,金嘉琦
(沈阳工业大学 机械工程学院,辽宁 沈阳 110870)
0 引言
由于磁悬浮技术具有无摩擦、无污染、噪声小、高效节能等一系列优点,使其在近几年成为研究热点并取得了丰硕的研究成果。由磁悬浮永磁平面电机组成的直驱式平面工作台可有效解决传统工作台存在的摩擦、间隙等问题[1];作为空间飞行器高精度姿态调整关键执行机构的磁悬浮飞轮具有节能、寿命长、输出力矩大等优点[2];磁悬浮技术还应用于交通运输、磁轴承、高速机床、医疗器械等领域[3-5]。磁悬浮技术可分为电磁悬浮技术和永磁悬浮技术,电磁悬浮技术具有不可断电及线圈发热耗能等不足;永磁悬浮技术可通过永磁铁提供悬浮力,具有节能环保等优点,可有效降低制造成本。
本文首先阐述并联型永磁悬浮系统结构及相应工作原理,使用PD控制使系统稳定悬浮;其次分别给予系统阶跃扰动及外力干扰,并对系统响应结果进行分析总结。
1 并联型永磁悬浮系统结构及悬浮原理
并联型永磁悬浮系统结构及原理如图1所示。该系统由置于正上方的盘状径向永磁铁提供磁力,位于永磁铁两侧的“F”形铁轭(坡莫合金)构成闭合导磁回路,两个大小不同的铁球分别置于左、右铁轭脚部正下方。
设定图1(a)状态为系统初始位置,此时永磁铁转角为0°,磁铁N、S极垂直相对,由N极出发的磁力线经左、右铁轭直接回到S极而不经过铁球,此时两铁球无悬浮力生成。如图1(b)所示,永磁铁顺时针旋转40°,部分磁力线依然通过导磁铁轭直接回到S极,而另一部分磁力线则经过“右铁轭-右铁球-左铁球-左铁轭”构成的有效导磁回路回到S极,此时铁球与铁轭之间有悬浮力生成。随着永磁铁转角的增大,悬浮力也随之增大,由于永磁铁的对称结构,当θ=90°时悬浮力达到最大值,通过伺服电机驱动永磁铁转角大小便可实现两铁球的稳定悬浮。

图1 并联型永磁悬浮系统结构及原理图
2 悬浮特性研究
控制系统原理如图2所示,系统悬浮实验以dSPACE作为控制核心,两铁球位移Refz1、Refz2及电机转角α作为系统输入,c1、c2、c3为初始值,分别经PD控制器计算,经过求和获得伺服电机控制电流,再由闭环控制系统实时调节电机转角大小以实现铁球稳定悬浮。实验中使用的PD控制器参数分别为kp1=-91 746,kd1=-1 327;kp2=117 990,kd2=1 602;kp3=48,kd3=0.3。
2.1 阶跃外扰实验
当系统在平衡位置处稳定悬浮时(如图3所示),两铁球与下方限位铁片及上方铁轭脚部均不接触,说明系统处于稳定悬浮状态。

图2 控制原理图
稳定悬浮时,分别给予左、右球0.05mm的较小阶跃扰动,系统响应如图4所示。图4(a)中,当给左铁球一阶跃向上外扰时,为使铁球向上移动,永磁体回转角略增大,使悬浮力增大。但铁球向上移动后,悬浮气隙减小,悬浮力继续增大。为达到再次稳定悬浮,永磁体回转角迅速减小,直至悬浮力与铁球重力达到新的平衡状态。图4(b)为给右铁球阶跃外扰时的响应结果,其响应过程与给左球扰动时类似,向上的阶跃扰动促使磁铁转角增大,悬浮力随之增大,两铁球均向上移动。但右球质量较大,同样的外扰,永磁体转角的波动幅度较大。
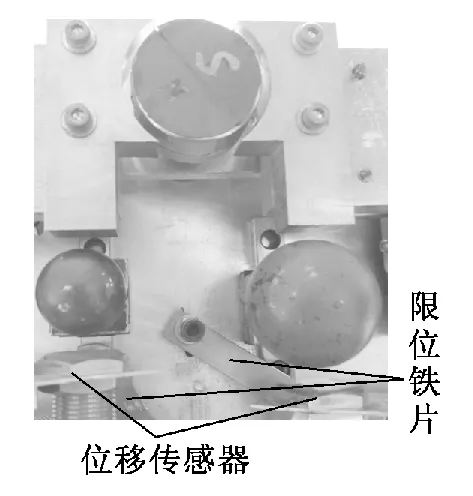
图3 系统稳定悬浮

图4 系统的阶跃响应
2.2 外力干扰实验
2.1 节所述为系统稳定悬浮状态给阶跃扰动的实验,是通过干扰电机控制电流间接改变磁铁转角的外扰方式,可视其为内部扰动。为进一步研究系统对于外力扰动的响应情况,当系统处于稳定悬浮状态时,使用不导磁物体分别给予铁球一轻微的正下方敲击外力,系统响应结果如图5所示。
图5(a)中,当敲击左铁球时,左铁球受外力作用向下移动,此时永磁铁转角也随之减小,对于右球而言,悬浮力减小,重力作用下右球向下移动;当敲击干扰撤去后,系统在闭环控制系统作用下,永磁铁转角增大阻止铁球下移,最终达到新的稳定悬浮状态。图5(b)为右球外力干扰响应结果,对右球施加向下的压力时,磁铁转角增大,由于外力及重力之和大于悬浮力,右铁球被动向下移动,而左球的悬浮力会增大,所以左铁球会向上移动,当外力干扰撤去后,系统依然能在新的平衡位置稳定悬浮。
3 结论
本文提出一种基于改变闭合导磁回路中有效磁通量继而改变回路中悬浮物悬浮力的并联型永磁悬浮系统,阐述了系统结构及其工作原理。悬浮实验中利用PD控制器使两铁球稳定悬浮,在平衡位置处分别给予左、右铁球阶跃外扰及外力干扰,实验结果表明:闭环控制系统作用下,当给予悬浮物较小扰动时,系统可根据位移及转角输入信号实时调节磁铁转角使系统保持稳定悬浮状态。

图5 系统的外力干扰响应
[1] 张新华,孙玉坤,项倩雯,等.一种动圈式磁悬浮永磁平面电机实时电流分配策略[J].中国电机工程学报,2013,33(6):144-152.
[2] 汤继强,韩雪飞,刘强.微框架效应磁悬浮飞轮转子轮缘优化设计[J].光学精密工程,2012,20(9):1991-1997.
[3] 许自豪,钱坤喜,王颢.永磁轴承最小悬浮转速与转动惯量的关系研究[J].中国机械工程,2012,23(8):900-905.
[4] 高琳,徐宗海,朱凯,等.锥形磁悬浮轴承的建模与解耦控制[J].中国电机工程学报,2013,33(6):153-160.
[5] 孙凤,王亚刚,李东生,等.悬挂式永磁悬浮系统的悬浮特性研究[J].组合机床与自动化加工技术,2012,33(11):25-28.
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
小猕猴智力画刊(2021年3期)2021-04-08
南京大学学报(数学半年刊)(2020年1期)2020-03-19
作文评点报·作文素材小学版(2020年1期)2020-02-14
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
小学阅读指南·低年级版(2017年6期)2017-06-12
小雪花·成长指南(2015年5期)2015-05-25
压缩机技术(2014年5期)2014-02-28
