
基于DSP的线性菲涅尔太阳能集热系统设计与实现
2015-01-01 03:00:22上海电气集团股份有限公司中央研究院王浩林张津王魏
太阳能 2015年9期
上海电气集团股份有限公司中央研究院 ■ 王浩林 张津 王魏
0 引言
随着人们生活水平的不断提高、国民经济的飞速发展和能源需求的不断扩大,太阳能作为一种取之不尽、用之不竭的资源,已成为人们最关注、研究开发最多的一种新能源。聚光型太阳能热发电是典型的太阳能利用方式之一,其原理是利用太阳辐射所产生的热能进行发电。按聚光方式进行分类,主要有塔式、碟式、槽式和线性菲涅尔等[1-3]。本文针对线性菲涅尔集热系统存在遮挡和阴影及跟踪精度不高等问题,设计了一套具有高精度跟踪控制器的线性菲涅尔太阳能集热系统。
1 LFR集热器镜场布置原理
1.1 LFR集热器镜场布置原理
线性菲涅尔反射式(Linear Fresnel Refl ector,LFR)集热系统由反射镜场、吸收器和跟踪器组成。镜场一般采用南北方向布置,接收器固定安装在镜场中心上方。但由于反射镜间距、接收器体积和位置影响,LFR系统普遍存在遮挡和阴影现象。减小遮挡和阴影对系统的影响是线性菲涅尔集热系统设计需要解决的关键问题。Mills等[4]提出了紧凑型LFR聚光装置的概念,可减小遮挡和阴影造成的反射镜间距。本文提出了一种在没有遮挡的临界情况下的镜场布置方法,并按照该方法设计了一个微弧面反射镜场。

图1 镜场布置原理图
LFR集热系统镜场布置原理如图1所示。吸收器开口宽度为W,吸收器距离镜场中心O的高度为H,相邻反射镜距离为Sn,等弦长反射镜弦长为D,拱高为d,第n面反射镜与镜场中心O的水平距离为Qn,第n面反射镜中心切线与水平面夹角为βn,第n面反射镜下端点切线与水平面夹角βn,d。根据图1可得如下表达式:

式中,α为太阳高度角,由式(4)[5]求得:

式中,δ为太阳赤纬角;ψ为当地纬度,北半球取正值;ω为太阳时角。
设弧面镜弧面半径为R,根据几何关系可求得βn,d:

当太阳直射光线与水平x轴垂直时,α为90 °,此时镜场的初始条件为:
1.2 吸收器宽度确定
假设每一面反射镜都能将入射到反射镜面的阳光无遮挡地反射到吸收器上,则吸收器开口宽度W必须大于最边缘反射镜光斑宽度。在实际应用中,吸收器开口宽度一般取最小值,即最边缘反射镜光斑宽度。根据图1中几何关系可得:

由式(1)~(8)可得集热器镜场的布置参数。由式(8)计算腔体吸收器开口W时所用到的初始宽度为D,可能导致接收器的阴影宽度大于Q1,使得吸收器在镜场的阴影对反射镜产生遮挡,因此需要将此时的开口宽度W进行优化计算。优化计算时,将求得的腔体吸收器开口宽度W带入式(9)中,重新计算镜场的各参数。

根据式(1)~(8)计算出镜场参数后,将求得的开口宽度W按照图2中判断关系式进行判别。如果满足判别式,则得到正确的镜场布置参数;如果不满足,则将求得的开口宽度带入式(9)重复上述计算过程,直到满足判断关系式,得出正确结果。

图2 镜场设计逻辑图
2 LFR集热系统镜场设计
由于三角形腔体吸收器内部能量分布均匀,且吸收器内壁能量密度高,具有较好的热性能[6],所以本文采用三角形腔体吸收器。其中,吸收器距离镜场中心高度H为4000 mm,吸收器两边分别布置5面反射镜,反射镜弦长D为400 mm、长为6000 mm,拱高d为1 mm。
根据上文提出的方法,按图2进行优化计算,得到开口宽度W为230 mm,镜场设计所需要的布置参数如表1所示。

表1 镜场布置参数表
根据表1中的镜场布置参数,利用TracePro光学仿真软件建立镜场模型并进行仿真,得到集热器镜场光线追迹和能量分布图,如图3所示。其中,反射镜(超白玻璃)反射率为0.97,吸收率为0.03;腔体吸收器反射率为0.03,吸收率为0.97。由仿真结果可知,当太阳入射角为90°时,本文设计的集热器镜场中相邻反射镜没有遮挡和阴影现象,设计方法正确可靠。

图3 2#镜场光线追迹图和吸收器能量分布图
3 DSP跟踪控制器
LFR工作时,反射镜将太阳光反射到固定位置安装的吸收器上,但随着太阳自东向西运动,太阳光线入射角度会发生变化,因此需采用跟踪控制器,确保每面反射镜都能将太阳光反射到吸收器上[7]。本文设计了基于数字信号处理器(DSP)的线性菲涅尔单轴太阳跟踪控制器,通过直流电机和传感器实现闭环精准控制。
3.1 跟踪控制器硬件设计
本文所设计的跟踪系统采用主动式单轴跟踪,跟踪控制器硬件由核心控制模块、功率驱动模块和手动控制模块3部分组成,原理图如图4所示。核心控制模块由处理器、通信接口、风速接口、调试接口和控制电源等组成,主要用于计算追日算法和采集位置传感器、风速传感器信号,对反射镜进行闭环控制和风速保护,并与上位机通信,方便调试和参数监控。其中,处理器采用TMS320F2812作为核心控制芯片,通讯接口采用 RS232和 RS485。

图4 跟踪系统功能框图
功率驱动模块由主电源、驱动电路、隔离保护电路、直流电机和位置传感器组成,主要用于执行处理器控制指令,驱动镜场联动机构运动,并实时将位置信号反馈给处理器。跟踪器设定功率容量为600 W,母线电压设定为24 V,峰值母线电流设定为20 A。选用高速MOSFETN型IRF4905及P型SN70N10A构成驱动器的H逆变桥,驱动电路由光耦电路及共射三极管电路构成,当系统出现驱动欠压和过压过流等异常情况时,能够隔离驱动信号,防止对后续执行机构造成损害。
手动控制模块设计了复位、手动自动模式切换、手动正和手动负等功能,主要用于安装调试及手动校准时控制菲涅尔反射镜动作。
3.2 跟踪控制器软件设计
3.2.1 控制原理图
跟踪控制器控制原理图如图5所示。系统首先根据所在地的地理位置和时间信息计算理论高度角,然后驱动直流电机带动镜场联动机构进行太阳跟踪,同时通过安装在直流电机上的霍尔元件(位置传感器)进行位置检测,与理论高度角进行比较,进行闭环控制。系统在运行过程中会实时进行风速检测,如不满足运行条件,系统会自行进入风速保护模式。
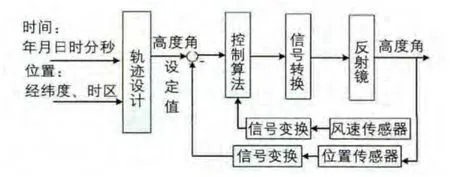
图5 控制原理图
本文设计的跟踪系统采用主动式单轴跟踪,通过太阳高度角计算公式(4)可得出不同时间所对应的太阳高度角及日出、日落时间,其中日出、日落时太阳高度角α为0。上海位于东经121.5°、北纬31.24°,以2013年11月9日为例,通过式(4)可得当日太阳高度角α如表2所示。
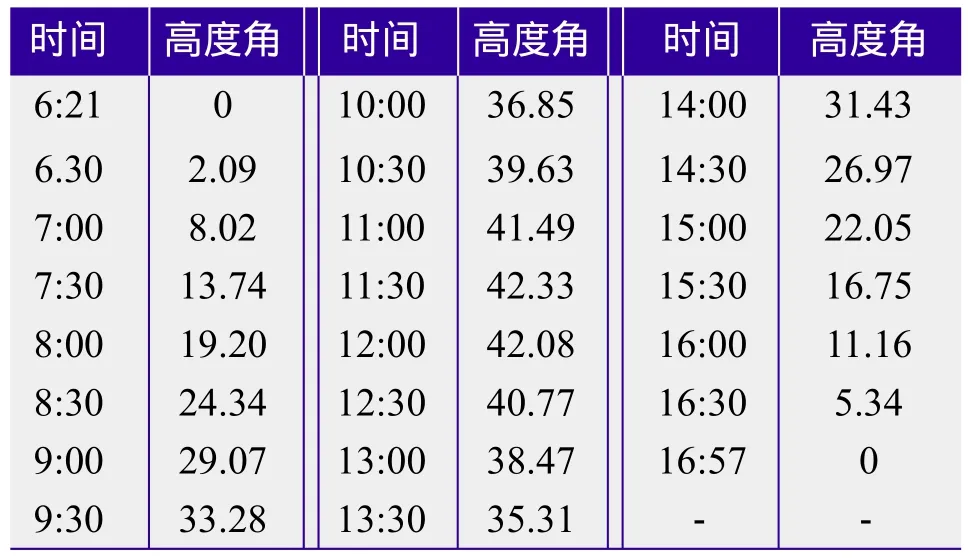
表2 上海太阳高度角列表(单位:°)
3.2.2 控制算法实现
系统控制流程图如图6所示。日出时,系统启动,当太阳高度角变化为Δα时,镜场相应转动Δα/2;日落时,反射镜回到初始位置。当风速大于20 m/s时,系统产生风力警报,并将反射镜复位。同时,系统设置了掉电保持功能,以免掉电后位置数据丢失。

图6 跟踪系统程序流程图
4 集热系统测试
本文设计的线性菲涅尔太阳能集热系统如图7所示。

图7 跟踪控制器
系统在图8所示的智能微网中进行了试验验证,结果表明,系统最大误差为0.39°,满足线性菲涅尔极热系统对高跟踪精度的要求,且具有操作简单、易于维护及稳定性高等特点。高度角实验数据如表3所示。

图8 系统实验
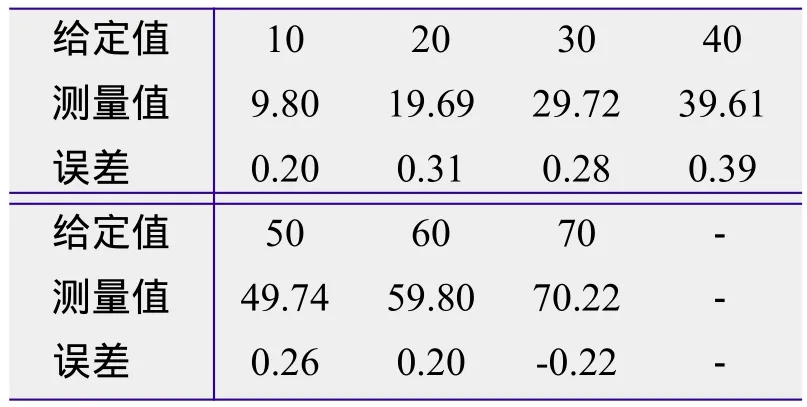
表3 高度角实验数据表(单位:°)
5 结论
文中通过分析线性菲涅尔太阳能集热系统原理,提出了一种线性菲涅尔太阳能集热系统设计方法,并通过此方法设计了一套由线性菲涅尔镜场、吸收器和跟踪控制器组成的线性菲涅尔太阳能集热系统。在该系统中,微弧面反射镜按照一定的初始角度安装,并在太阳跟踪控制器的控制下将太阳光线反射到镜场上方固定安装的三角形腔体吸收器上。实验表明,当太阳入射角为90°时,本文设计的集热器镜场中相邻反射镜无遮挡和阴影现象,且具有较高的控制精度和风速保护等功能,适用于大规模镜场布置设计。
[1] Sabir Rustemli, Furkan Dincer, Emin Unal. The analysis on sun tracking and cooling systems for photovoltaic panels [J].Renewable and Sustainable Energy Reviews, 2013, (22): 598-603.
[2] John A Duffie, William A Beckman. Solar Engineering of Thermal Processes [M]. NewYork: Jone Wiley & Sons, 2006, 326.
[3] Fausto Cavallaro. Multi-criteria decision aid to assess concentrated solar thermal technologies [J]. Renewable Energy,2009, 34 (7): 1678-1685.
[4] Mills D R, Morrison G L. Compact linear Fresnel reflector solar thermal power plants [J]. Solar Energy, 2000, 68(3): 263-283.
[5] Li Zhimin, Liu Xinyue, Tang Runsheng. Optical performance of vertical single-axis tracked solar panels[J]. Renewable Energy,2011, 36: 64-68.
[6]谢文韬. 菲涅尔太阳能集热器集热性能研究与热迁移因子分析[D]. 上海: 上海交通大学, 2012.
[7] Graham Ford. CSP: Bright future for linear Fresnel technology?[J]. Renewable Energy Focus, 2008, 9(5): 48-49.
猜你喜欢
宇航计测技术(2023年4期)2023-09-07 07:11:18
节能与环保(2022年10期)2022-11-18 01:28:54
家庭影院技术(2020年2期)2020-03-25 13:27:42
农业机械学报(2018年9期)2018-09-17 06:49:48
农村青少年科学探究(2017年3期)2017-06-19 15:13:00
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
山西大同大学学报(自然科学版)(2016年4期)2016-11-27 02:21:00
光学精密工程(2016年6期)2016-11-07 09:07:06
电源技术(2016年9期)2016-02-27 09:05:31
云南师范大学学报(自然科学版)(2015年5期)2015-12-26 12:46:14
