船舶舵机推舵系统频率特性分析与研究
2015-01-01 02:21:28毛立峰
船舶与海洋工程 2015年3期
邓 攀,李 彬,毛立峰
(上海船舶设备研究所,上海 200031)
0 引 言
船舶舵机系统的作用是使船舶维持原来的航向或改变航向[1],由于液压系统具有功率体积比大的特点[2],现代远洋船舶基本采用电动液压驱动的液压舵机[3]。随着船舶操纵机动性要求的提升以及综合姿态控制需求越来越迫切,如舵减横摇、舵鳍联合控制,舵机能否实现对操舵指令的快速跟踪成为研究重点。而如果舵机系统频率特性达不到要求,即使舵机系统的功率足够大,也不能实现快速跟踪操舵指令信号,如正弦操舵指令信号。
虽然现阶段国内研究机构已对船舶舵机系统进行了较多的研究[4~7],但是以研究舵机轨迹规划为主,对于开发动态特性高的液压舵机系统的研究相对较少[8]。为了设计高频响的船舶舵机系统,有必要分析影响舵机系统频率特性的因素。
通过建立基于ADAMS、AMESim和MATLAB的联合仿真模型,分析各因素对舵机系统频率特性的影响,这些因素主要包括泵的频响,以及推舵机构中各结构参数。最后得到影响舵机系统频率特性的主要参数。
1 建立基于ADAMS、AMESim和MATLAB的舵机系统联合仿真模型
以拨叉滑块推舵机构作为研究对象。根据给定的推舵机构机械结构参数,采用Pro/E软件绘制出舵机推舵机构的总体图,其结构见图1。
利用ADAMS软件和Pro/E无缝接口的功能,将图1所示的推舵机构的装配图导入到ADAMS软件中,并添加约束和碰撞检查。定义输入接口为推舵液压缸所出的力、输出接口为舵机的转角,以便在机械系统、液压系统和控制系统进行联合仿真时对模型进行调用。所建立舵机推舵机构的详细三维ADAMS动力学模型见图2。
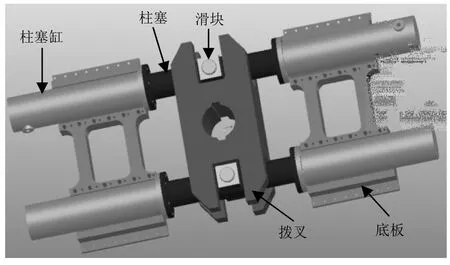
图1 推舵机构的三维图

图2 推舵机构的ADAMS模型
根据舵机液压原理以及所用主要元件的样本确定出舵机液压系统各部件的参数,在AMESim软件环境下建立液压系统的仿真模型。建立的双泵组双液压缸舵机液压系统模型见图3。定义舵机液压系统AMESim模型的两个比例阀的电流控制信号为输入接口、推舵液压缸所出的力为输出接口。
利用AMESim和MATLAB/Simulink的无缝接口,将AMESim液压系统模型导入至MATLAB/Simulink中,并基于Matlab/Simulink建立整个舵机系统的控制系统模型,转化后的AMESim液压系统模型中的主泵斜盘摆角控制指令、液压缸推力输出信号均与Simulink模块相连。所建立的舵机总体控制系统Simulink模型见图4。

图3 舵机液压系统AMESim模型

图4 舵机总体系统联合仿真模型
2 舵机系统组成
常规舵机系统主要由电机、变量泵、推舵机构、管路等组成(见图5)。
舵机系统的控制原理见图6。通过外部输入的舵角信号作为指令信号传递到舵角位置控制环节,该环节将指令信号与实际舵角反馈信号进行比较,并通过舵角位置控制器运算得出合理的液压系统控制参数,然后通过液压系统驱动推舵机构转动,带动舵叶转到所需的角度。

图5 舵机系统组成
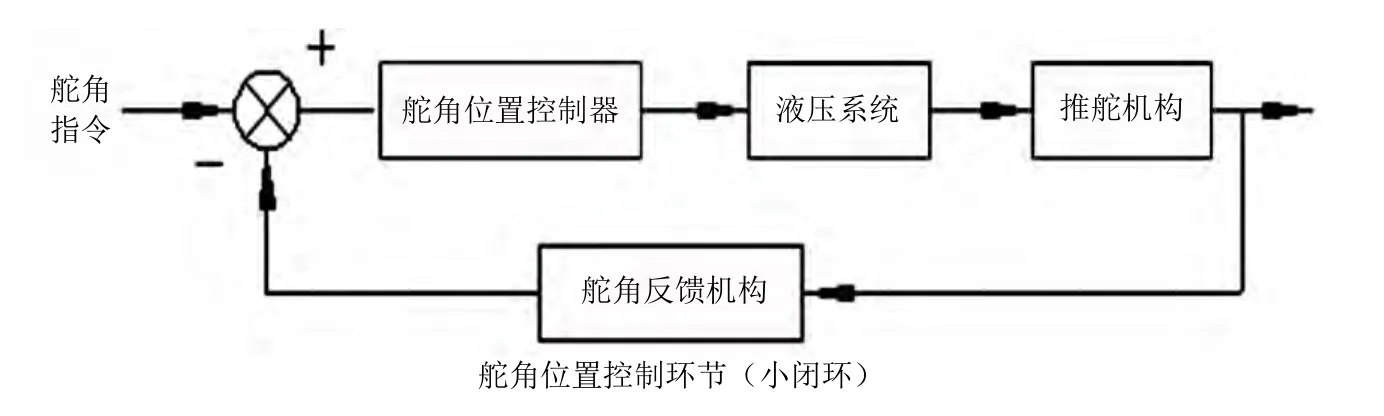
图6 舵机系统控制原理
3 舵机系统频响特性分析
常规舵机系统关键组件和参数如下:
(1) 主泵排量125ml/rev,响应时间0.1s;
(2) 推舵油缸有效作用面积:0.0452m2;
(3) 推舵油缸的总行程:0.8289m;
(4) 推舵油缸柱塞的质量:832kg;
(5) 推舵单侧力臂:0.55m;
(6) 舵柄及负载惯量:103.8kNm;
(7) 主油路管径0.051m,长度3m;
在基于上述参数与建立的联合仿真模型的分析中,期望舵机能实现的转舵速度为 5º/s、正弦转舵控制的幅值为10º且频率为0.08Hz,折算到推舵油缸最大速度为0.0538m/s、正弦幅值为0.097m。
3.1 泵的频响特性分析
主泵的阶跃响应曲线和频响特性曲线见图7。
进行舵机系统设计时,尽量选择高响应的变量泵。通过查询变量泵的样本,选择响应频率高于舵机正弦转舵频率的变量泵,可消除泵对整个舵机系统频率响应的影响。主泵的上升时间是0.1s,频率为10Hz。泵的选择满足舵机系统正弦转舵频率要求。
3.2 执行机构的频率特性影响分析
根据上述参数和联合仿真模型可以绘制出常规舵机推舵执行机构的频率响应特性曲线(见图8)。可知基于本节常规舵机仿真参数的推舵执行机构液压固有频率为13.3Hz,满足舵机系统正弦转舵频率要求。
为了合理设计舵机转舵系统液压执行机构,下面基于联合仿真模型分析执行机构中的6个主要参数对转舵系统执行机构频率特性的影响:

图7 变量泵性能曲线
3.2.1 柱塞缸有效作用面积产生的影响
在联合仿真模型中,将柱塞缸面积减小1倍,其他结构参数不变,执行机构的频率响应特性曲线见图9。由图可知,柱塞缸有效作用面积减小1倍,固有频率减小4Hz,为9.3Hz。
3.2.2 推舵力臂产生的影响
在仿真模型中,将推舵力臂减小1倍,其他结构参数不变,执行机构的频率响应特性曲线见图10。由图可知,推舵力臂减为原来的一半后,固有频率减小了4Hz,为9.3Hz。

图8 推舵执行机构频率特性

图9 柱塞缸面积减小1倍,执行机构频率特性
3.2.3 主油管路体积产生的影响
在联合仿真模型中,将主油管路体积增加1倍,其他结构参数不变,频率响应特性曲线见图11。由图可知,主油管路体积改变,会影响执行机构的频率特性,其体积增加1倍后,固有频率减小了1Hz,为12.4Hz。
3.2.4 柱塞缸活塞质量产生的影响
假设在联合仿真模型中,负载(舵杆、舵叶)质量为23000kg,将柱塞缸活塞质量增加1倍,其他参数不变,频率特性曲线见图12。由图可知,对大惯量负载的舵机系统而言,液压缸活塞质量增加1倍,推舵执行机构的固有频率几乎没有变化,为13.2Hz。

图10 力臂减小1倍,执行机构频率响应特性

图11 主油管路体积增加1倍,执行机构频率特性
3.2.5 舵柄惯量产生的影响
仍假设负载质量23000kg,舵柄惯量增加1倍,其他参数不变,执行机构的频率特性曲线见图13。由图可知,对具有大惯量负载的舵机系统而言,舵柄惯量增加1倍,执行机构的固有频率几乎没有变化,为13.2Hz。

图12 柱塞质量增加1倍,执行机构频率特性

图13 舵柄惯量增加1倍,执行机构频率特性
3.2.6 柱塞缸作用个数产生的影响
双柱塞缸作用时,单柱塞缸的等效负载质量为总质量的1/2,频率特性曲线见图8,频率为13.3Hz。单柱塞缸作用时,单柱塞缸上的等效负载质量为总负载质量,频率特性曲线见图14。由图可知,单柱塞缸作用时,推舵执行机构的频率降低了3.93Hz,变为9.37Hz。
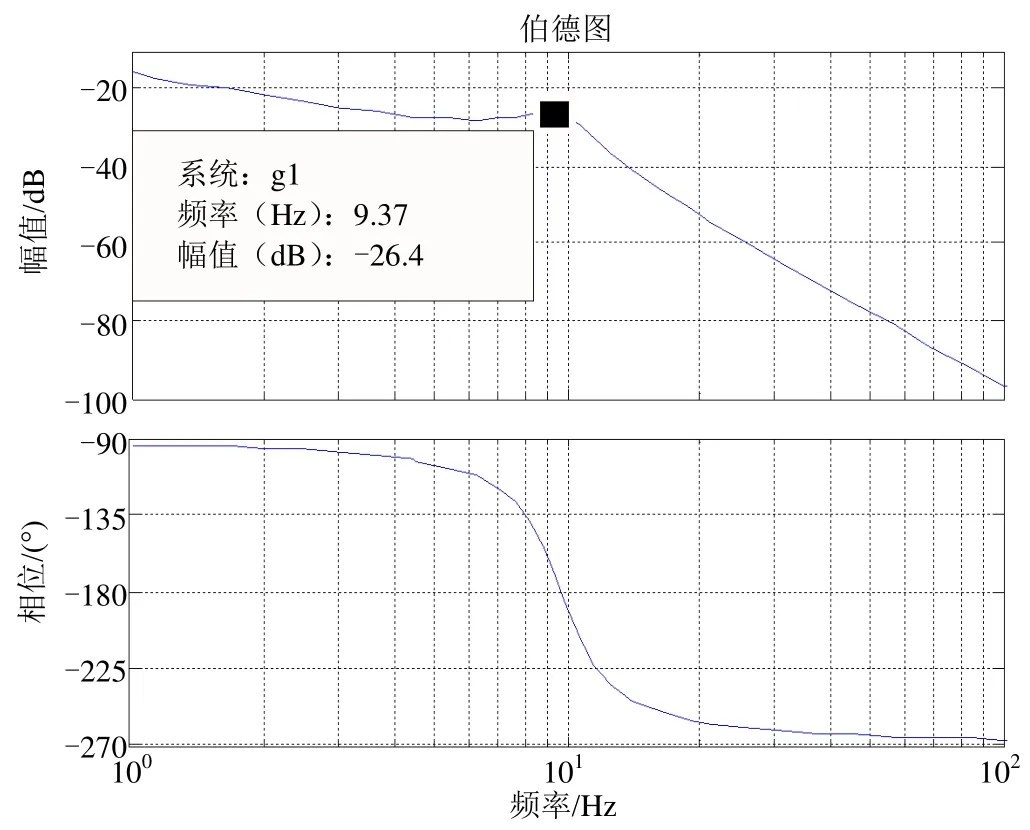
图14 单柱塞缸作用时执行机构的频率特性
4 结 语
基于ADAMS、AMESim和MATLAB所建立的舵机系统的联合仿真模型,对舵机系统进行了仿真分析。针对变量泵和推舵机构对舵机系统频率特性的影响,得到以下结论:
1) 推舵系统频率特性直接影响舵机实现快速跟踪舵令信号的性能。
2) 变量泵应选择频宽高于期望的舵机正弦转舵信号,以便消除变量泵对整个舵机系统频率特性的影响。
3) 6个影响舵机推舵机构固有频率的因素中,影响最大的是柱塞缸有效作用面积、柱塞缸作用个数和推舵力臂;对大惯量负载舵机系统而言,舵柄惯量、柱塞缸质量、主油管路体积对舵机执行机构频率特性的影响很小。
4) 柱塞缸有效作用面积越大,舵机执行机构固有频率越高;柱塞缸作用个数越多,舵机执行机构固有频率越高;推舵力臂越大,舵机执行机构固有频率越高。
[1] 苏东海, 黄鑫. 船舶舵机液压参数设计[J], 液压气动与密封, 2008, (6): 14-16.
[2] 李洪人. 液压控制系统[M]. 北京: 国防工业出版社, 1988.
[3] 张李伟,庄才亮,夏明宽,等. 性能卓越的转叶式舵机设计[J], 船舶与海洋工程,2014,(2):35-39.
[4] 高海平. 船舶舵机调节器的性能优化研究及运动可视化[D]. 武汉:华中科技大学, 2008.
[5] 霍学亮, 任光, 张均东. 基于Simulink的船舶舵机系统的建模与动态仿真[J]. 大连海事大学学报, 2007, 33(S1): 74-76.
[6] 付永领, 罗会标. 传统PID自动舵的改进研究[A]. 中国航空学会液压气动专业2005年学术讨论会[C], 2005.
[7] 朱晕, 王富东. 利用Matlab仿真船舵角位置跟踪系统分析与修正[J]. 计算机辅助工程, 2006, 15(l): 68-69.
[8] 祝惠一. 船舶液压舵机系统设计研究[D]. 重庆: 重庆大学, 2010.
猜你喜欢
天然气与石油(2022年5期)2022-11-01 09:03:00
天然气与石油(2022年4期)2022-09-21 07:05:54
现代电力(2022年2期)2022-05-23 12:46:16
中国惯性技术学报(2018年1期)2018-05-10 16:24:00
电测与仪表(2017年20期)2017-12-19 05:14:24
重庆理工大学学报(自然科学)(2017年5期)2017-06-29 12:01:58
西部广播电视(2015年17期)2016-01-18 03:46:22
中北大学学报(自然科学版)(2015年6期)2015-12-02 07:01:48
贺州学院学报(2015年1期)2015-02-28 17:56:46
导航定位与授时(2014年2期)2014-04-27 13:41:08