基于ADAMS的越野车侧倾稳定性分析与改进
2014-12-31 12:08丁义兰王显会皮大伟
机械工程与自动化 2014年2期
丁义兰,王显会,皮大伟,杨 波
(南京理工大学 机械工程学院,江苏 南京 210094)
0 引言
越野车因其具有结构尺寸大、质心高、装载质量大等特点,最易诱发侧翻事故,故如何提高越野车的侧倾稳定性是车辆研发人员面临的一个重要课题。Neil R.Everett[1-3]等将理论研究和计算机数值模拟相结合,分析出准静态侧翻极限;江苏大学的薛念文、潘建等人利用动力学软件分析了导向机构对越野车侧倾稳定性的影响[4],实现了悬架结构的优化。本文运用ADAMS软件建立越野车整车多体动力学模型,分析其侧倾稳定性,在此基础上,侧重考虑整车质心、轮距、悬架刚度与阻尼等结构参数对侧倾稳定性的影响,并提出改善侧倾稳定性的方法。
1 越野车整车动力学模型的建立
1.1 越野车实车模型
越野车三维模型如图1所示,发动机前置,四轮驱动,前、后悬架均为变刚度螺旋弹簧的非独立悬架。驱动桥前端和后端分别通过横向推力杆、上下各两根纵向推力杆与车架相连;前驱动桥左右两边通过转向节与车轮相连,后驱动桥直接和车轮相连;转向系由转向横拉杆和转向直拉杆组成,其中转向横拉杆和转向直拉杆均与转向节固定相连。越野车参数见表1。
1.2 建模假设及坐标系的选择
越野车是一个复杂的多质量系统,为便于分析进行如下简化和假设:①整车系统简化为与侧倾稳定性分析有关的多刚体系统,含前悬架、后悬架、车身、车轮、转向系,忽略与仿真无关的制动系,传动系简化为作用在4个车轮上的驱动;②左、右悬架以越野车的纵向中轴线对称;③悬架中除了弹性元件和橡胶元件外,其余零部件都简化为刚性体,在仿真过程中,不发生变形;④轮胎和地面模型采用系统中提供的相应属性文件修改而成[5]。
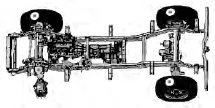
图1 越野车三维模型

表1 越野车参数
定义越野车坐标系[6]原点位于两前轮轮心连线的中点,x轴正方向为车辆行驶的反方向,y轴正向为汽车行驶方向的右方,z轴与地面垂直,正方向向上。
1.3 整车模型
利用ADAMS/View,建立前悬架、后悬架、车身、转向系及车轮的虚拟模型,如图2所示。建模所需的数据由厂家直接提供或从厂家提供的三维数模中间接获得。
1.4 模型的验证
根据GB/T6323.6-1994《汽车操纵稳定性试验方法稳态回转试验》要求[7],在试车场进行稳态回转试验,试验方法为驾驶员操纵汽车以最低稳定速度沿所画圆周行驶,待记录各变量的零线后,车辆起步,均匀地加速(纵向加速度最大不超过0.25m/s2),直至侧向加速度达到6.5m/s2为止,记录整个过程。

1-前纵向推力杆;2-减震器;3-前横向推力杆;4-前横向稳定杆;5-转向直拉杆;6-转向横拉杆;7-螺旋弹簧;8-前驱动桥;9-轮胎;10-后横向推力杆;11-后横向稳定杆;12-后驱动桥;13-后纵向推力杆;14-车身
依据实车试验行驶工况,编辑驱动控制函数对整车进行稳态回转仿真,试验与仿真结果如图3所示。国标QC/T480-1999中将不足转向度定义为前、后轴侧偏角差值与侧向加速度关系曲线上侧向加速度为2m/s2处的平均斜率。从图3(b)中可以计算出试验不足转向度为0.78(°)/(m·s-2),仿真得到的不足转向度为0.82(°)/(m·s-2),仿真与试验结果差距较小,证明整车模型准确度较高。
2 整车侧倾稳定性分析
2.1 侧倾稳定性评价指标
根据实车试验,选用如下指标对其侧倾稳定性进行分析:①车辆的质心侧向加速度;②质心横摆角速度;③前、后车轮垂直载荷转移量。
2.2 仿真试验与分析
2.2.1 稳态回转试验仿真
依据GB/T6323.6-1994《汽车操纵稳定性试验方法稳态回转试验》要求,编写相应的驱动函数,得到越野车速度和各评价指标曲线,如图4所示。随着行驶速度的增加(图4(a)),越野车的质心侧向加速度越来越大,接近4m/s2,横摆角速度也发生剧烈变化,不断增加至25(°)/s(图4(b));前、后轮的垂直载荷发生了很大变化,但此时所有车轮的垂直载荷未降至0,故该车还未侧翻,但已处于比较危险的状态,有侧翻的可能(图4(c)和图4(d))。

图3 试验与仿真结果对比

图4 稳态回转速度和各评价指标仿真曲线
2.2.2 鱼钩试验
鱼钩试验[8]是转向角输入至物理极限的行驶工况,高速公路上较常发生的侧翻事故多由该原因引起。由于目前国内严格针对侧翻的试验标准还没有颁布,故依据美国NHTSA-2010进行抗翻滚性能测试(鱼钩试验)[9]。编写相应的驱动函数,得到越野车质心轨迹和各评价指标曲线,如图5所示。越野车直线行驶一段时间后,突然实施急转弯(图5(a)),质心侧向加速度发生突变,远远超过6.5m/s2,横摆角速度开始发散(图5(b));前后轮垂直载荷均出现了0,各车轮离地,越野车发生了侧翻(图5(c)和图5(d))。
在稳态回转试验中,若持续增加行驶速度,当车速高于105km/h时,各曲线变化趋势类似图5,侧翻倾向较大;在行驶过程中遇到紧急情况,实施急转弯,就很容易发生侧翻。通过仿真试验可得出该车侧倾稳定性较差。
3 影响参数敏感度仿真分析及改进措施
3.1 影响参数敏感度仿真分析
为分析整车结构参数变化对越野车侧倾稳定性的影响,选取4个主要结构参数进行分析,即整车质心高度、后桥轮距、悬架刚度和悬架阻尼。为考察每个参数变化对越野车发生侧翻可能性的影响,在保持其他3个参数不变的情况下,修改其中的某个参数,将比较通用的评价车辆侧翻的横向载荷转移率LTR的最大值作为评价指标[10]。当越野车发生侧倾,内侧垂直载荷为零时,LTR为1,车辆发生侧翻。
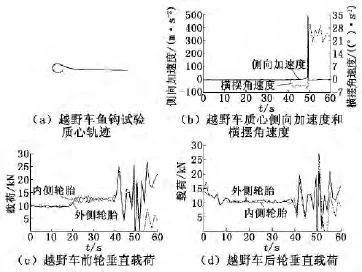
图5 鱼钩试验质心轨迹和各评价指标仿真曲线
通过多次仿真并对仿真结果进行拟合,得到各参数对车辆侧翻影响曲线,如图6所示。4个参数中整车质心和后桥轮距的变化对LTRmax影响较大;随着整车质心高度的增加,LTRmax逐渐增加,车辆发生侧翻倾向较大;当后桥轮距增加时,LTRmax减小,越野车侧翻倾向逐渐变小;悬架刚度影响较小,随着刚度的增加,LTRmax也逐渐减小;悬架阻尼对该车侧倾性影响最弱,随着相对阻尼系数的增加,LTRmax略有增加,侧倾稳定性稍许下降。
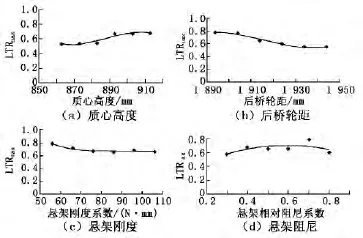
图6 各参数对LTRmax的影响
3.2 改进措施
由影响参数敏感度仿真分析可知,车辆的结构参数对越野车侧倾稳定性有很大影响。
运用ADAMS/View进行多次仿真,以车辆侧翻的横向载荷转移率LTRmax为评价指标,通过改变车辆的个别结构参数,分析改进后越野车的侧倾稳定性,见表2。从表2中可知,降低整车质心高度和增加后桥轮距可以提高越野车的侧倾稳定性,适当匹配悬架的刚度和阻尼(即增加悬架刚度,略微降低悬架阻尼)也可以增加越野车的抗侧翻能力。

表2 改进后横向载荷转移率LTRmax
4 结论
仿真分析发现后桥轮距是影响侧翻倾向最为明显的参数,质心高度与其相似,而悬架的刚度和阻尼对越野车侧倾稳定性也有较大影响。降低整车质心高度和增加后桥轮距,重新匹配悬架刚度和阻尼(即增加悬架刚度,略微降低悬架阻尼)等措施,可以提高整车侧倾稳定性能。
[1]Neil R Everett.Investigation of a roll control system for an off-road vehicle[J].SAE Paper,2000-01-1646.
[2]Mallikarjunarao C.A study of the directional and roll dynamics of multiple-articulate vehicles[G]//Proc 7th IAVSD Symposium on the Dynamics of Vehicles on Roads and Tracks.England:Cambridge,1981(4):7-11.
[3]Macadam C C.A computer-based study of the yaw/roll stability of off-road characterized by high centers of gravity[J].SAE Paper,1998-02-1260.
[4]薛念文,潘建.某越野车导向机构对侧倾的影响分析[J].重庆交通大学学报,2011,30(1):141-146.
[5]张俊友,贺翠华.基于虚拟样机技术的多轴转向车辆建模与仿真分析[J].机械设计与制造,2013(3):123-124.
[6]余志生.汽车理论[M].北京:机械工业出版社,2007.
[7]Cronje P H,Els P S.Improving off-road vehicle handling using an active anti-roll bar[J].Journal of Terramechanics,2010,10(47):179-189.
[8]褚端峰,李刚炎.半主动悬架汽车防侧翻控制研究[J].汽车工程,2012,34(5):400-432.
[9]岳国辉,张凯.美国NHTSA2010版新车评价规程的实例解析[J].汽车安全与节能学报,2012(2):129-135.
[10]金智林,胡海岩.汽车侧翻预警及防侧翻控制[J].动力学与控制学报,2007,5(4):365-369.
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
阅读(科学探秘)(2020年3期)2020-05-29
模具制造(2019年3期)2019-06-06
北京汽车(2016年6期)2016-10-13
现代制造技术与装备(2015年4期)2015-12-23
越玩越野(2015年2期)2015-08-29
航天器工程(2014年5期)2014-03-11
汽车维护与修理(2014年10期)2014-02-28