
紧急状况下车辆操作特性的仿真研究
2014-12-31 12:17:08夏如艇土居俊一
汽车工程学报 2014年1期
夏如艇,土居俊一
(1.台州学院 机械工程学院,浙江,台州 318000;2.日本香川大学 工学部,日本,高松 761-0396)
近年来,随着人们安全意识的提高,除了对车辆的运动性能提出了高要求之外,还迫切要求车辆具有良好的舒适性和预防安全性能。现代车辆的开发更多地把人-车作为一体进行设计和评价,基于人-车-环境系统分析的车辆运动性能设计和基于驾驶员认知﹑判断和操作的驾驶支持系统的设计开发成为当今汽车发展的主流。驾驶行为是驾驶员依据人-车-环境系统中的各种视觉信息作出快速认知﹑准确判断和稳定操作的过程,车辆直行、转弯和停车等基本运动性能与驾驶员的视觉反应能力和驾驶操作能力紧密相关[1-5]。当行驶遇到紧急状况时,如前方障碍物突现或弯道急转事件出现,若车辆运动性能低下或驾驶操作不当,将可能造成人车冲突甚至交通事故。前方障碍物突现或急转弯路面摩擦因数降低等情形下,驾驶员通常会依个人驾驶习惯进行转向、制动或二者组合的回避操作[6-8]。为了科学评价交通安全及车辆运动性能,进一步提高车辆预防安全装置性能,详细阐明紧急状况下的驾驶操作特性显得尤为重要。本文通过对驾驶时各种交通状况的调查分析,根据人﹑车辆和环境三要素,相对应地把驾驶员操作﹑车辆运动和交通场景构成驾驶模拟试验系统的基本要素,设计了前方障碍物突现和急转弯路面摩擦因数下降两种紧急交通状况。采用一种新型的驾驶模拟装置,研究驾驶员在这两种紧急状况下的回避操作行为特性,并对试验数据进行科学解析。对于分析交通事故和制定交通安全策略以及对车辆回避性能的评价提供指导,并为紧急回避转向操作支持系统技术的开发提供了试验依据。
1 直道行驶紧急避障操作
1.1 试验方法
1.1.1 被试者:年轻组和年长组。
年轻组25~35岁,教师17名(其中女性7名),本科生9名(其中女性2名),共26名,驾龄均大于2年。年长组50~60岁,教师18名(其中女性6名),后勤、保卫及机关管理职员(即非教师人员)8名(其中女性3名),共26名,驾龄均大于4年。所有被试者均有正常视力或正常校正视力,且均取得驾驶执照。
1.1.2 试验装置
图1表示驾驶模拟装置(TRDS-Ⅱ型)。模拟装置包括驾驶座舱﹑道路场景投影﹑平行轨道3部分,由横向平移和倾斜转动2个自由度运动构成。驾驶座舱可沿着平行轨道横向平移运动,座舱下有一根回转轴,垂直于轨道,可绕轴回转,最大回转角度±15°。座舱后上方安置一个投影仪将交通场景投影到前方的屏幕上。车辆及驾驶环境和行驶任务等试验参数,主要包括车辆类型﹑行驶速度﹑直线路段行驶﹑弯道路段行驶﹑弯道曲率半径和障碍物突现位置及驾驶时间等。图2是直道行驶时的投影场景之一,投影屏幕设置在被试者前方2.5 m处。图3是模拟装置系统控制界面。车辆类型设置﹑试验参数选定和场景投影输出均由软件控制。
1.1.3 试验设计
车辆类型:A型车,转向共振频率1.0 Hz;
B型车,转向共振频率1.5 Hz
行驶速度:60 km/h (16.7 m/s);
100 km/h (27.8 m/s)
行驶路程:全程10 km(前半程和后半程各5 km)
单侧路宽:3.5 m
如图4所示,被试者首先进行预备驾驶任务5 km(图中左侧前半程),路侧的边墙无障碍物突现,其目的是让被试者习惯了没有障碍物突现的驾驶任务,而从后半段开始呈现障碍物突现,以凸显紧急状况,不使被试者对障碍物突现产生预测。然后从后半段开始进行共10 km的驾驶任务,行驶途中的路侧有障碍物突现,每半程共有6次障碍物突现情景。要求被试者在10 km行驶任务中进行12次紧急避障操作任务,且每个被试者均要求进行A型和B型两种车型及两种车速的试验。试验中,被试者成功避障后,继续驾驶前行,再进行下一次避障操作。若避障失败,则车辆停止,重启发动机,继续前行。每种车型各试验10 km。图5表明了障碍物突现时的车辆避障状况。
1.1.4 试验程序
预先设定交通环境及行驶任务等参数。试验过程是:被试者驾驶操作→伴随操作的车辆状态变化→伴随车辆运动的场景变化→伴随场景变化的各种驾驶操作。行驶道路是由直道和弯道组成的双向对开普通路面,并沿着一侧驾驶。被试者端坐在驾驶座舱内,手握转向盘并注视屏幕上的交通场景进行模拟驾驶。根据场景出现的紧急状况,迅速反应并快速做出判断,当路侧障碍物突现时,紧握转向盘,并立即采取转向或制动等紧急避障操作。此时,驾驶座舱的移动或转动等试验数据均由控制软件自动记录和处理。本试验设定障碍物(汽车)从路侧边墙处突现,测试驾驶员的瞬间驾驶操作行为特性。
1.2 结果与讨论
1.2.1 紧急避障操作动作的差异
根据控制软件记录的避障成功和失败等数据,对两组被试者及两种车型的记录数据进行统计分析。图6和图7表明了被试者在试验车速60 km/h和100 km/h紧急避障时的驾驶操作动作状况。
从图6可知,当障碍物第1次出现时,低速状况下80%被试者只采取制动避障操作(下称制动避障),20%被试者采取转向和制动组合避障操作(下称复合避障)。在高速状况下,采取复合避障的比例有所下降,采取制动避障的比例有所增加,两组被试者之间有略微差异。但从图7可知,在第2次及以后各次遇到障碍物突现时,两组被试者对于障碍物突现采取复合避障的比例增加,尤其是年轻被试者采取复合避障的比例增加明显,在低速状况下所占比例为67.6%,制动避障占28.3%,转向避障只占4.1%。而年长组的比例分别为复合避障占41.8%,制动避障占58.2%,而转向避障为0。然而,比较低速和高速状况下的紧急避障时,随着车速提高,制动避障比例也明显增加,表明了车速对驾驶员的紧急避障操作有明显影响。
图8和图9分别表明了不同性别和不同职业被试者在两种车速状况下第2次及以后各次的紧急避障操作方式。图8表明,两种车速状况下的紧急避障操作方式在性别上没有明显差异性,同样,高速状况下采取制动避障的比例明显增加。图9表明,在低速状况下采取制动避障的比例存在一定的差异性,这可能是由于职业习惯和驾驶先验知识的差异所致,但在高速状况下制动避障的比例没有明显的差异。
从上述试验结果可看出,当第1次遇到障碍物突现时,约80%的驾驶员只是采取制动避障的方式进行避障,在采取避障操作措施时年龄﹑性别和职业上的差异性不大,在高速状况下紧急避障时驾驶员通常会采取制动避障的方式。当再次遇到障碍物突现时,采取转向和制动复合操作的方式进行避障的比例明显增加。这一结果潜在地提示,对驾驶员进行安全驾驶模拟训练和教育有一定的作用。同时也意味着车辆的制动系统和转向系统应具备良好的协调控制性能。比较第2次及以后各次的紧急避障操作状况下各种被试者的试验结果,只有低速状况下的紧急避障在职业上略有差异,但各结果均表明,随着车速的增加,制动避障的比例也明显增加。说明了在高速行驶紧急避障状况下,导致追尾或碰撞事故的可能性将增加。
1.2.2 紧急避障操作反应时间的差异
表1结果表明,当障碍物突现时,两组被试者释放油门踏板的平均反应时间无明显差异,但踩下制动踏板的反应时间年轻组比年长组平均少约0.25 s。比较踩下制动踏板和转动转向盘的平均反应时间,可以看出,制动操作比转向操作要早,且年轻组比年长组的转向反应时间少。依据生理学和认知心理学理论,这一结果也说明了年轻驾驶员在生理活动能力和视觉功能及视觉注意等方面具有优势。
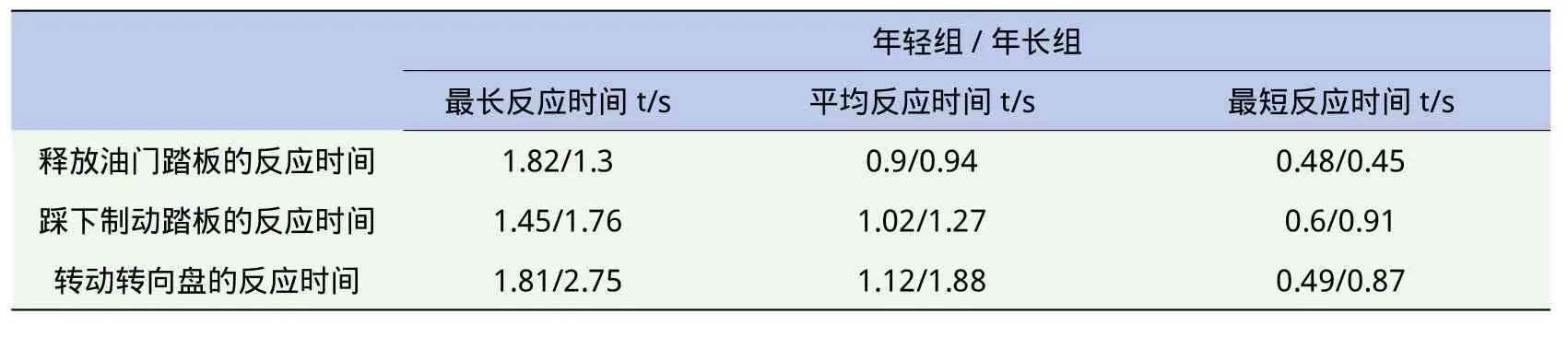
表1 两组被试者避障操作时各动作的反应时间
1.2.3 不同车辆类型转向避障操作动作的差异
图10表明了A型车和B型车复合避障时的差异。从图中可知,驾驶A型车时,复合避障占57.6%,制动避障占42.4%;而驾驶B型车时,复合避障占62.5%,制动避障占37.5%。即驾驶B型车比驾驶A型车的复合避障比例高,并且在试验结束后,对被试者的询问调查得知,回答“借助转向方式进行复合避障时,B型车比A型车更易操作”的被试者占多数。这一结果说明,车辆转向共振频率对紧急避障有一定影响。
图11表明了两种车型在试验车速100 km/h和60 km/h避障时脱离车道的状况。比较图11(a)和(b)可知,A型车避障脱离车道比B型车所占比例大。为了回避来自左侧的突现障碍物,然后向右转动转向盘且脱离车道,在车速为100 km/h时,A型车和B型车的比例分别为28.6%和24.4%,差异不明显。但当避障之后,车辆向左侧脱离车道然后车辆又向右侧脱离车道,所占比例分别为7.14%和2.4%,A型车比B型车的比例大。此外,车速对紧急避障有较大影响,在低速60 km/h时,脱离车道的比例明显比100 km/h时要小,但低速避障时A型车与B型车的差异性不明显。这一结果表明,与1.2.1中的结果分析一致,在高速行驶中当障碍物突现时车辆脱离车道发生事故的比例将可能增加。
图12是A型车和B型车的转向角与偏航率的波形图(Lissajous图)。从图中可知,当紧急避障转向时,转向角度一样,A型车比B型车偏航率大,也就是说,当避障转动转向盘时,A型车比B型车偏转要延迟一些。这一结果是由于不同车辆的转向性能的差异所致。
2 弯道行驶紧急回避操作
在弯道急转时,后轮的路面摩擦因数降低,后轮侧向力变小,偏航比例增大,车辆向内侧偏转,若不进行适当的转向操作,将导致车辆失控。另外,前轮的路面摩擦因数降低时,前轮侧向力变小,车辆向弯道外侧滑移。
2.1 试验方法
2.1.1 被试者
被试者为男性,25~50岁,30名,驾龄2~5年。所有被试者均有正常视力或正常校正视力,且均取得驾驶执照。
各组建村两委班子必须要有公心,对合作社和社员要有高度负责的态度,切勿产生“重组建、轻经营”的现象。在经营管理上,在做好竹材一产的同时,充分发挥竹林规模集约优势,节本生效、开源节流,以拓宽合作社经营渠道,增强合作社自我造血能力。
2.1.2 试验装置
与1.1.2中的装置相同。
2.1.3 试验设计
车辆类型为B型车,转向共振频率1.5 Hz。试验行驶路线有5个弯道,全长约6 km,弯道与直线路段组合,如图13所示。试验车速60 km/h(16.7 m/s),最急弯道处转弯半径100 m时车辆横向加速度约2.8 m/s2,车辆产生旋转和偏移。
2.1.4 试验程序
每个被试者进行模拟驾驶3圈。第1圈是为了适应驾驶模拟装置的适应性试验,不作数据记录;第2圈使后轮路面摩擦因数降低;第3圈使前轮路面摩擦因数降低。前方弯道路面行驶场景如图14所示。
2.2 结果与讨论
2.2.1 后轮路面摩擦因数下降时的转向回避模式
当车辆转弯紧急回避时,后轮路面摩擦因数降低,驾驶员转动转向盘朝车辆偏转增加的反方向进行转向。若转向回避操作不当,将使车辆旋转甚至回避失败,导致车辆脱离车道。30名被试者弯道回避操作共150次,统计数据得出,有116次发生车辆旋转现象,占77%。分析表明,转动转向盘进行回避的模式有3种,如图15所示,即模式A是车辆正常旋转后朝反方向转动转向盘,再多次左右转动转向盘的模式;模式B是正常旋转后朝反方向仅1次转动转向盘的操作模式;模式C是正常旋转后朝反方向转动转向盘并保持转向角不变的操作模式。模式A操作35次,所占比例30%;模式B操作48次,所占比例41%;模式C操作33次,所占比例29%。
采用不同的转向回避模式会产生不同的回避结果。图16表示了用3种不同转向模式成功回避急弯并保持车辆不脱离行驶车道的比例。从图中可知,采用模式A转向方式的回避成功率最高,模式B的回避成功率最低。
2.2.2 前轮路面摩擦因数下降时的转向回避模式
当前轮路面摩擦因数降低,驾驶员同样需要转动转向盘,其转动方向是朝转弯内侧,以保持车辆在行驶车道内。与后轮路面摩擦因数下降时的状况相比较,统计数据得出,驾驶员同样也会采取上述3种模式进行转向回避操作。分析表明,当采取模式A回避操作时,回避成功的比例要高,所占比例为88%。
3 结论
采用一种新型的驾驶模拟装置研究了紧急状况下驾驶避障的操作方式和反应时间及弯道行驶时的转向回避模式。探讨了不同年龄﹑性别和职业的驾驶员紧急避障操作方式的差异,重点研究了车辆转向性能和路面状况对紧急避障操作方式和反应时间的影响。对于分析交通事故和制定交通安全策略以及对车辆回避性能的评价可提供借鉴,并且可为紧急回避转向操作支持系统的技术开发与设计提供试验依据。
(1)当第1次遇到障碍物突现时,80%的驾驶员只是采取制动避障方式进行避障。从障碍物突现到踩下制动踏板的反应时间年轻驾驶员约为1 s,比年长驾驶员平均少约0.25 s。
(2)车辆转向共振频率对转向回避操作有影响,转向共振频率1.5 Hz的车辆比频率为1.0 Hz的车辆具有更好的转向回避性能。
(3)在弯道急转时,为保持车辆姿势稳定,当后轮路面摩擦因数降低应朝转弯外侧操纵转向盘,而当前轮路面摩擦因数降低应朝转弯内侧操纵转向盘。
References)
[1]IGUCHI H. Consideration for Creating Comfort of a Vehicle [J]. Denso Technical Review,2011,15(1):3-9.(Special issue,in Japanese)
[2]马爱静,毛建国,沈恒,等.驾驶员转向行为建模的研究进展[J].汽车工程学报,2013,3(6):391-399.
Ma Aijing,Mao Jianguo,Shen Huan,et al. An Overview of Development of Driver Steering Behavior Models[J].Chinese Journal of Automotive Engineering,2013,3(6):391-399. (in Chinese)
[3]洪亮,杨亚联,宋安兴,等.人-车-路闭环的汽车稳定性控制模拟仿真试验研究[J].汽车工程学报,2013,3(3):183-190.
Hong Liang,Yang Yalian,Song Anxing,et al. Study on Stability Strategy by Driver-Vehicle-Road-Loop Virtual Simulation Test[J].Chinese Journal of Automotive Engineering,2013,3(3):183-190. (in Chinese)
[4]DOI S. Advanced Driving Behavioral Analysis and Application for Future Active Safety[J]. Review of Automotive Engineering,2009,28(1):3-9.
[5]DOI S. Driving Support Systems Based on Human Factors[J].Denso Technical Review,2009,12(1):3-10.(in Japanese)
[6]DOI S,MIZUNO M,KUROYANAGI H,et al.Development of Driving Simulators and Their Application to Driving Maneuver Analysis [J]. R & D Review of Toyota CRDL,1998,33(1):3-11. (in Japanese)
[7]AMANO Y,HADA M,DOI S. A Model of Driver's Behavior in Ordinary and Emergent Situations [J].R&D Review of Toyota CRDL,1998,33(1):23-30. (in Japanese)
[8]DOI S,NAGIRI S,AMANO Y. Analysis of Active Safety Performances of Automobile Based on Driving Maneuvers in Emergent Situations[J]. R & D Review of Toyota CRDL,1998,33(1):31-38. (in Japanese)
猜你喜欢
数学小灵通·3-4年级(2024年2期)2024-05-15 02:03:36
小学生学习指导(中年级)(2021年3期)2021-04-06 09:12:08
小学生学习指导(低年级)(2020年9期)2020-11-09 09:11:30
共产党员(辽宁)(2019年7期)2019-11-18 10:25:03
共产党员·上(2019年4期)2019-04-26 12:31:32
传感器与微系统(2018年7期)2018-08-29 00:44:30
环球时报(2017-08-18)2017-08-18 07:46:39
小学生学习指导(高年级)(2017年3期)2017-02-17 10:29:23
学生天地(2016年22期)2016-03-25 13:12:09
奥秘(2016年3期)2016-03-23 21:58:57
