
CT7000CDH印刷机输送设备驱动系统改造
2014-12-25 01:48魏小军
设备管理与维修 2014年8期
魏小军
(河南日报报业集团印务中心 郑州)
一、问题
2005年引进的日本东京机械CT7000CDH报纸印刷机,该印刷机配套的报纸输送设备(以下简称龙骨线)由东京机械子公司金田机械生产,具有自动跟踪速度、自动夹报、自动排接头、自动排乱报等功能,是一套高速运转的自动化印后设备,其主要构成如下。
(1)上报站。位于龙骨线前端,包括驱动装置、自动排接头装置、夹报输送轨道前端和传送带等部件。
(2)夹报输送轨道。由轨道、夹子链条和夹报夹子组成。
(3)下报站。位于龙骨线中后部,由放报装置、乱报检测、传送带和电气柜组成。
(4)收集乱报装置。位于龙骨线最后端,也是夹报输送轨道的最后端,用于收集排列较乱而无法直接送到下一道工序的报纸。
龙骨线使用两年后,夹报输送轨道转弯部分轨道内侧磨损较严重,因设备在质保期内,生产厂家免费更换磨损部分轨道。使用1年后,保养检查时,发现更换过的轨道又磨损严重。进一步检查发现,轨道中夹子链条的链节以及链节之间的链销和轴套也有所磨损,导致整个夹子链条总长度增大。再加上轨道磨损后轨道面不平滑,夹子链条在轨道中运行时不顺畅,又加速了轨道和链条的磨损。整个龙骨线运行时振动加大,噪声大,随时有损坏危险。龙骨线是报纸生产流水线重要环节,为此要彻底解决此问题。
二、问题分析
考虑到该龙骨线使用的轨道材料是铝合金,因此初步认为原因是铝合金材料强度不够。经咨询厂家,考察同行业设备,发现很多使用相同材料的龙骨线未发生此类情况,据此排除材料原因。与同行业交流时发现,龙骨线使用的驱动装置不止1个,均为两个或两个以上。单位其他品牌的4条龙骨线均采用3个驱动装置,而该龙骨线仅使用1个驱动装置,故怀疑原因可能是驱动装置数量少。夹报输送轨道长度较长,且有3个大的转弯,夹报输送轨道的夹子链条由驱动装置驱动,驱动装置位于夹报输送轨道前端(上报站处),驱动装置驱动夹子链条传动时,导致夹子链条各部位受力不均。尤其是在转弯处阻力相对较大的地方,夹子链条的链节有的被挤紧,有的被拉伸,长期下来链节与链销与轴套因受力大而磨损。当链条在转弯轨道中运行时,由于链节磨损而动作不灵活,导致对轨道表面施加的压力加大,摩擦力增大,轨道便产生磨损。
彻底解决问题的方法是改造龙骨线,增加驱动装置数量,使夹子链条的驱动力更平均。
三、改造实施
1.确定驱动装置数量
龙骨线夹报输送轨道长度为11 m,故增加1套驱动装置即可满足要求。
2.确定新增驱动装置位置
由于下报站处空间大,又靠近夹报输送轨道后端,与前端已有的驱动装置的距离比较平均,故计划在此部位增加驱动装置。
3.配件和材料
1套驱动装置机械传动机构。1台SGDM-50ADA型安川伺服驱动器。1台SGMDH-44ACA61型安川伺服电机。两节轨道(材料和样式同原轨道,长度按实际需求定做,用于连接新增驱动装置前后轨道)。1个600 mm×450 mm×1000 mm电气控制柜。其他机械和电气安装配件和辅料。
拆除下报站处原有两节轨道,增加支架来固定新增的驱动装置(机械传动机构和伺服电机),调整位置使新增的驱动装置与夹子链条啮合。再在新增的驱动装置前后安装订购的轨道,使轨道联通。为缩短接线距离,将新增电气柜与原电气柜背靠背安装在一起,新增电气柜电源取自原电气柜,根据设计的电气原理图进行器件安装、布线和接线。
4.电气原理图
增加SRV2(新增伺服驱动器)控制图,修改PLC输入/输出信号图等电气原理图(图1,虚线框内为新增部分)。
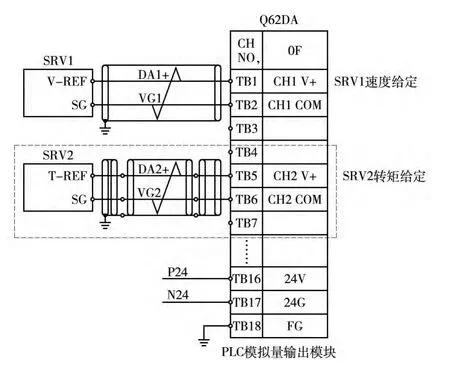
图1 SRV2转矩给定
5.修改PLC程序
本机使用三菱Q系列PLC,为此使用三菱编程软件GX Developer修改PLC程序。结合电气原理图,在原PLC程序中增加PLC输入/输出程序(图2)和SRV2转矩给定程序(图3),然后将修改后的PLC梯形图程序保存为新工程。方法:将QC30R2型编程电缆两端分别连接电脑的com1端口和PLC的RS232端口;在电脑上运行GX Developer,在菜单中选择“工程”→“打开工程”后弹出对话框,在对话框中选择保存新工程的路径和文件名,单击“打开”;然后在菜单中选择“在线”→“PLC写入”后弹出对话框,在对话框内单击“选择所有”后,单击"执行",上传程序。
6.设置伺服驱动器参数
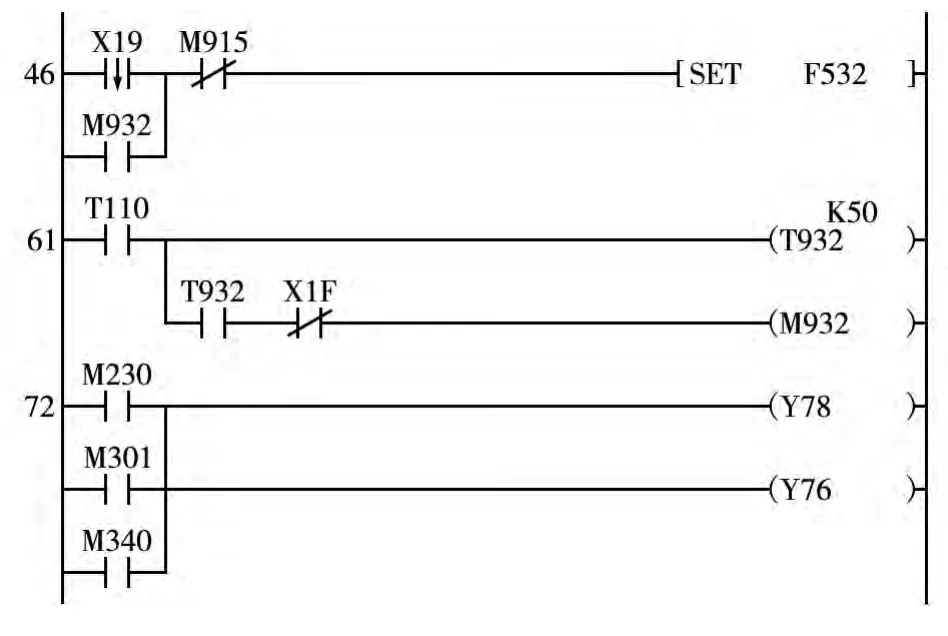
图2 PLC输入/输出程序

图3 SRV2转矩给定程序
改造后的龙骨线具有两个伺服驱动器,因此需要定义伺服驱动器的主从关系。将SRV1(原伺服驱动器)当作主伺服驱动器,SRV2当作从伺服驱动器,SRV1的控制方式仍为速度控制。为使SRV2按比例输出转矩,将其控制方式设为转矩控制,而且新增伺服电机需按顺时针方向旋转,因此SRV2的Pn000参数应设置为0021。SRV2的转矩给定信号由PLC的模拟量输出模块给出,PLC的模拟量输出模块输出电压范围为0~10 V,对应的转矩范围为0至额定转矩,即转矩增益为10 V/额定转矩,与之对应,SRV2的转矩指令输入增益应设置为100(单位为0.1 V/额定转矩),即100×0.1 V/额定转矩=10 V/额定转矩,因此将 SRV2的参数Pn400设置为100。其他参数的设置均保留默认值,不用修改。
改造后,设备上电测试,龙骨线运转平稳,各项功能使用正常。经过几年测试检验,未发现明显磨损情况,设备使用寿命有效延长。
猜你喜欢
环球时报(2021-04-23)2021-04-23
电脑爱好者(2020年6期)2020-05-26
中国建筑金属结构(2019年4期)2019-05-15
课堂内外(小学版)(2017年6期)2017-09-04
学与玩(2017年4期)2017-02-16
光学精密工程(2016年5期)2016-11-07
上海电机学院学报(2015年3期)2015-02-28
西安交通大学学报(2014年7期)2014-04-16
中国中医药现代远程教育(2014年20期)2014-03-01
中医研究(2013年10期)2013-03-11
