
智能升降旋转舞台控制系统开发
2014-12-23 06:44屈铁军
机械工程师 2014年6期
屈铁军
(黑龙江省机械科学研究院,哈尔滨150040)
0 引言
以我国目前大量建设和改建的剧场、演播厅的升降和旋转舞台机械为控制对象,研究适合我国国情的先进的舞台机械控制系统相关技术,进而为舞台制造企业提供技术支撑和解决方案。
采用当今最新发展的网络技术、电子技术、通讯技术、控制技术,开发出具有自主知识产权的高精度、高可靠、人机界面友好的多功能舞台综合机械控制装置及发展舞台控制技术的相关理论,解决国内在建的大量中小型文化设施中智能舞台机械的控制问题,改变传统的人工控制操作及引进系统的框架结构模式,使文化单位可根据实际需要自行“订制”符合自身要求的开放式控制装置,降低投资及生产成本,提高文艺演出水平,提高运营效益。
1 理论方法
在对国内外舞台自动化机械及控制技术发展水平及应用情况充分调研的基础上,研究了升降及旋转舞台控制系统系统设计的技术特点,确定了总体设计方案。
1)控制系统结构框架设计,确定了系统的控制方式及实现原理。
2)信号采集及电气拖动结构设计,包括控制系统主机结构设计、人机界面设计及现场信号处理功能模块设计。
3)构建了系统软件开发平台,编写了各功能模块操作及控制软件。
4)适用于系统结构及控制精度要求的控制算法的研究。
5)系统的工业设计及工艺化研究。
2 方案
以电机作为执行机构,由变频器、工业控制计算机等构成的自动控制系统的硬件结构体系;研究升降、旋转舞台控制中高精度控制算法。其中主要研究舞台的停车精度控制和多块升降过程中动态保持一定的位置误差控制问题。常规的PID控制和随动控制算法,在有些时候不能够满足这种要求,尤其是动态保持各个升降块的水平误差方面,很难整定控制器的参数。本系统针对舞台设备的特殊对象特性,构造合适的模糊控制规则,并结合常规PID等算法,共同完成对舞台升降和旋转的精确控制。要实现舞台的精确定位和动态过程的平稳,系统设计不允许在升降运动过程中出现超调,因此在舞台升降块的位置接近目标位置的时候,需要按照某个曲线预先减速停车。这个减速曲线与舞台设备的结构、惯性、载荷都有关,而且会随着舞台使用次数的增多而发生变化。要研究这种变化,并在程序中自动学习校正这种变化,使舞台能够准确地停在目标位置,具有自适应的特点。开发了各控制软件功能模块,通过改变控制参数和控制功能的组合,完成具体舞台系统的特定要求。
3 主要特点
该系统是一种低成本、高可靠性并具有强适应性的升降旋转舞台自动控制系统,具有高效率、高精度、运行稳定可靠、操作方便的特点,实现了行业应用设备的通用平台设计技术。
主要特点如下:1)在随动系统的基础上,结合模糊控制算法,实现多台升降旋转舞台在运行过程中自动对比速度及空间位置,并进行动态调整;2)能够根据运行的实际情况,自动学习由于系统惯性的改变而引起的停车不准确的特性,自动修正停车误差;3)升降旋转舞台在升降过程中各个升降块的动态位置误差不大于2mm;4)升降旋转舞台可在任意指定位置停车,停止位置误差不大于1 mm。
4 系统达到的主要技术指标
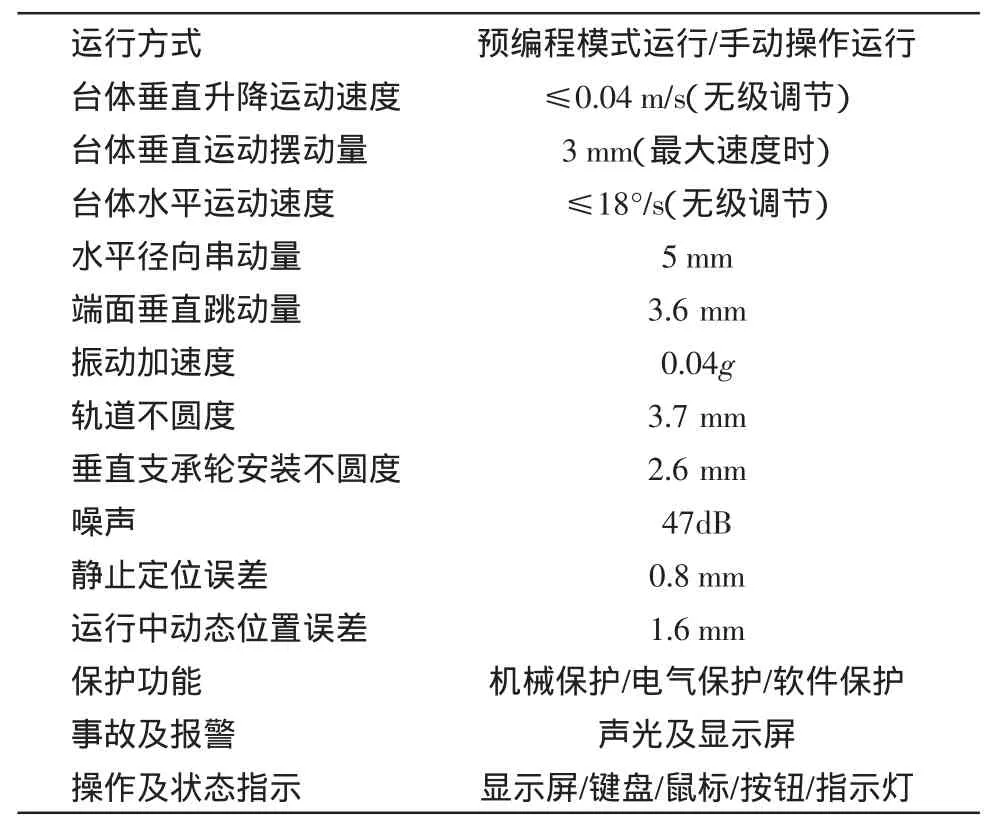
表1 主要技术指标
5 结语
综上,该系统为国内新建舞台和改造舞台机械工程项目提供了先进的控制系统技术装备,由于本系统具有灵活配置的特点,可以在控制系统总体框架基本不变的前提下,适应绝大部分升降旋转舞台机械的控制要求,具有很强的实用价值和推广价值。该系统达到了国内领先水平,满足了市场需求,其性能价格比在国内国际市场均有明显的竞争优势。同时推动我国舞台机械行业的技术进步和产品的更新换代。其市场前景广阔,具有显著的经济效益和社会效益。
[1] 白忠凯.PLC在舞台机械控制中的应用[J].国内外机电一体化技术,2002(2):45.
[2] 马守谦.多块舞台升降台的计算机控制系统[J].甘肃工业大学学报,1989(2):70-76.
[3] 李鹏.舞台台板同步模糊控制系统[J].电子技术应用,1998(9):23-25.
[4] 魏发孔.舞台升降台技术诊断分析及整改措施[J].起重运输机械,2002(4):9-11.
[5] 周铭.功能舞台电气控制系统的研究与设计[J].机电工程,1999(4):31-32.
[6] 宋宏.工控组态软件FIX及其在舞台吊机控制系统中的应用[J].艺术科技,2001(2):4-6.
[7] 张瑾.大型多层多块升降台的设计与研制[J].甘肃工业大学学报,1996,22(增刊1):19-22.
[8] 周铭,杨惠中.功能舞台电气控制系统的研究与设计[J].机电工程,1999(4):31-32.
[9] 何俐萍.大行程升降舞台结构方案的二级模糊综合评判[J].甘肃工业大学学报,2002(2):45-47.
猜你喜欢
凤凰动漫(军事大王)(2022年3期)2022-06-17
凤凰动漫(军事大王)(2022年1期)2022-04-19
当代工人(2020年8期)2020-05-25
制造技术与机床(2017年6期)2018-01-19
小溪流(画刊)(2017年12期)2018-01-10
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
电源技术(2015年9期)2015-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01
上海金属(2013年4期)2013-12-20
当代贵州(2009年8期)2009-05-31
