
通用航空中增强型近地警告系统的建模与仿真
2014-12-23 01:20沈笑云徐天宇焦卫东
计算机工程与设计 2014年3期
沈笑云,徐天宇,焦卫东
(中国民航大学 智能信号和图像处理天津市重点实验室,天津300300)
0 引 言
在机组操纵原因造成的飞行事故中有一种叫做 “可控飞行撞地(controlled flight into terrain,CFIT)”,是在飞行中飞机处于完全适航的状态下,由于未知地形操纵导致飞机撞到山峰、山脉、障碍物等而发生的事故。这类事故可能发生在大部分的飞行阶段,但更常见于进近和着陆阶段,在整个飞行事故中的所占比例比较大,据国外统计的资料,客机死亡人数约80%是由CFIT 造成的。
近地警告系统(ground proximity warning system,GPWS)是一种机载警告系统,它只在飞机起飞或复飞和进近着陆阶段、且无线电高度低于2450英尺时起作用。在上述条件下,根据飞机的形态和地形条件,如果飞机接近地面时出现不安全的情况,近地警告系统就在驾驶舱内发出视觉和声音两种报警信息,以提醒飞行员采取有效措施。增强型近地警告系统(enhanced ground proximity warning system,EGPWS)除了保留原有GPWS的模式报警功能外,还增加了一个前视地形预警模块。随着我国通用航空的快速发展,由于通用飞机具有在地形近处飞行和较强的机动性等特点,研究适用于通用飞机的EGPWS显得非常必要。
本文基于World Wind三维地理信息系统,根据通用航空飞机的特点,建立高分辨率的地形数据库,对快速的前视预警算法进行仿真实验。设计实现EGPWS 仿真系统,可以做到及时为通用飞机近地提供警告。
1 EGPWS的工作原理
如图1,EGPWS包括前视地形警戒和地形显示两个新增功能,其工作原理请参见文献[1]。
2 近地警告系统的建模
通过对以上提到系统的分析,本文借鉴其部分原理,设计出针对通用航空飞机的EGPWS 仿真系统。其包括3个主要核心模块:地形数据库、地形显示和前视地形预警模块。

图1 EGPWS系统结构
2.1 地形数据库的应用
EGPWS相对于GPWS的突出特点是前视地形预警功能,而其工作原理主要是由于自身具有全球地形数据库。如何建立地形数据库在本仿真系统中非常必要,地形数据量应该足够小,使相关的数据处理的方法更容易实现。例如地形数据搜索和更新,满足实时的地形显示的需要并准确及时地提供近地警告功能[2]。
全球地形数据库的构建是实现地形显示和前视地形预警功能的基础,全球地形数据库基于方形网格结构建模,它被广泛应用在数字高程建模中[3]。由于其结构简单,存储的数据量小,可以更方便的进行分析和计算。此外,还有机场数据库,其中包括机场名称,跑道长度、方向,跑道入口位置,跑道中心线的位置和机场高度等。
在山区或者机场周围需要高精度的分辨率,但是在海洋领域,不管分辨率如何,最大高程值都是相同的,在这些地区不需要较高的分辨率。这些因素都将考虑在地形数据库的建立中。
地形数据的实时搜索和更新:地形数据库的数据被用于地形近地警告和地形显示,在处理地形的近地警告的同时地形信息也被显示在CDTI上。地形近地警告是基于当前飞机的位置、速度等信息,通过搜索地形数据库,实时确定当前飞机位置周围的地形,并进行调用与存储。
为了根据飞机的当前位置实时更新地形数据,应该提供一个较大的地形显示范围并减少地形数据的处理时间。本文采用分层形式建立数据缓存区,如图2所示。飞机周围的地形数据具有最高精度的分辨率。随着距离的增加,地形数据的分辨率精度也随之下降。当前飞机的位置在第一层,这一层中,地形数据的分辨率精度是最高的。接下来是第二层和第三层,它们的精度逐渐降低。在每一层中,地形数据以当前飞机的位置为其中心来存储,当飞机飞越到每层地形边界时,二次缓存的地形数据将被更新,如图2所示。这种分层结构的数据具有可变精度的分辨率,并且可以减少内存中的数据量处理,对于大规模的地形显示可以缩短处理时间[4]。

图2 前视地形数据的搜索和更新
2.2 前视地形预警的实现
除了着陆,前视地形预警工作在所有飞行阶段,其工作高度在30英尺以上。通过整合当前飞机的位置、高度、速度等其它信息和自身的全球地形数据库。对在安全区域中潜在的危险地形,前视地形预警将给出相应的警戒和警告。安全区域分为在飞机前方的前视水平区域和在飞机下方的下视垂直区域。
2.2.1 前视水平安全区域的建立
根据通航小型飞机飞行的环境有很大不同,可能是白天或黑夜、目视气象条件或仪表气象条件(VMC/IMC),设计有两种前视地形预警模式:正常模式和低空模式[5]。正常模式比低空模式给通航小型飞机提供更大的前视预警范围,适合在在仪表气象条件或黑夜条件下使用。低空模式适合在白天目视飞行规则条件下使用,这主要是因为通航小型飞机大多是在近地飞行,飞行员容易看到直升机外面地形的情形。根据实际情况选择不同的预警模式。
前视水平安全区域是根据飞机的地速、飞机当前位置的经纬度和飞机的磁航向角的基础上建立的。为了减少不必要的警戒和警告,前视地形预警范围是有限的。同时有两种不同距离的前视水平安全区域,正常模式下,飞机与有碰撞危险的地形有30s的飞行距离,此为警戒判断区域,另一种警告判断区域是飞机与有碰撞危险的地形有20s的飞行距离;低空模式下,警戒判断区域范围为20s的飞行距离,警告判断区域范围为15s的飞行距离。
本研究探索以职工之家为依托,下设护士之家、男护士之家、人文关怀小组和兴趣活动小组,通过开展专题心理知识讲座、读书征文活动、兴趣活动小组、心理沙龙等多种活动形式,对护理人员心理状况进行分析研究并进行心理疏导以缓解护理人员心理压力。
根据通航小型飞机的性能参数,同时方便建模与算法研究,本文以飞机为圆心,磁航向角作为角平分线在90°范围内判断是否有潜在的地形危险[6],由此建立的前视水平安全区域模型为如图3所示。
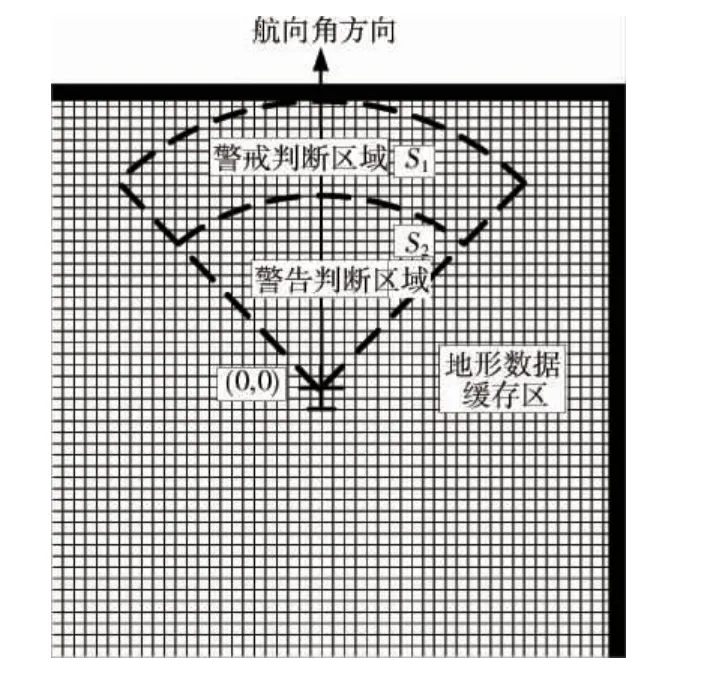
图3 前视水平安全区域
以正常模式为例,前视水平警戒判断区域的范围由飞机飞行到有危险地形或者障碍物的时间t乘以飞机当前的地速V 决定。如上面提到飞行时间t为30s,计算前视水平警戒判断区域的范围S1如下式所示

前视水平警告判断区域的范围由飞机飞行到有危险地形或者障碍物的时间t乘以飞机当前的地速V 决定,如上面提到飞行时间t为20s,计算前视水平警告判断区域的范围S2如下式所示

2.2.2 前视垂直安全区域的建立
前视垂直安全区域距离取决飞机和附近或目的地机场跑道的水平距离,其目的是用来防止飞机在起飞或者进近时产生不必要的警戒和警告。飞机垂直安全距离和到机场的水平距离的函数关系如图4所示。
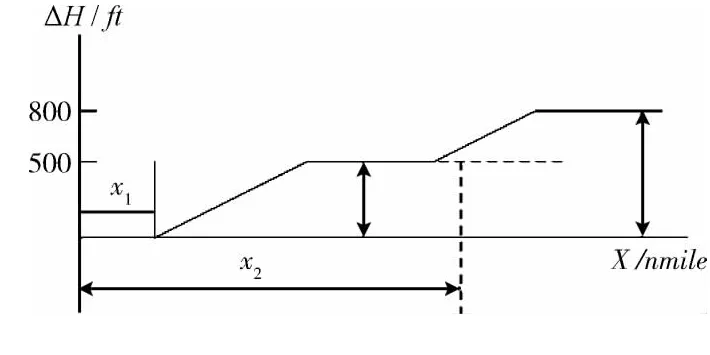
图4 飞机垂直安全距离和到机场的水平距离的函数关系
在图4中,水平的X 轴表示飞机距离机场跑道的水平距离(1n mile≈1852 m),而垂直的Y 轴表示前视垂直安全区域范围的垂直距离(1ft≈0.3 m)。当飞机距离跑道末端在x1范围之内,垂直安全距离一直维持在0,也就是说在该范围内,飞机的地形警戒和警告将不能被启动。从x1点开始,随着水平距离的增加,垂直安全距离也将以每海里100英尺增加,直到最后增加到500英尺高,随后一直保持到x2为12海里处。从此点开始,垂直安全距离再次以每海里100英尺直到增加到800英尺,然后高度不再改变。当飞机飞行在3000英尺高度以上前视垂直安全区域范围的距离将保持800英尺高度不变。
2.3 地形显示功能
地形显示是根据当前飞机状态参数,如位置、姿态和轨迹等信息,实时显示一定范围内的地形,在机载的CDTI仪表上显示二维地形地图,在World Wind三维地理系统中显示三维地形场景,同时还具有实时绘制二维或三维的航图功能。
本文利用World Wind三维地理信息系统,通过第三人称视角来观察三维地形场景,构建包含导航台、障碍物和飞机等的3D 模型库。当系统运行时,每个模型将通过提供的对象参数进行转换、缩放和重新定位。可以实时清楚地检测飞机与地形的关系,有利于观察飞机的高度和其周围的地形。从而更方便地分析基于地形表明基础上的近地警告研究。
3 近地警告系统的仿真与应用
本文基于World Wind三维地理信息系统开发了一个EGPWS仿真系统,研究了一些关键问题,如地形数据的组织和动态读取、实时渲染性能、并实现了地形的三维仿真和二维仪表的实时显示、信息读取、显示和综合分析近地警告功能。
3.1 近地警告仿真系统的功能模块
仿真系统包含4个功能模块:飞行仿真、地形数据库、前视地形预警和地形显示功能模块[7]。
在World Wind三维地理系统中,加载飞行仿真插件后[8],结合飞机三维模型沿航迹进行六自由度飞行仿真,对本机数据参数进行实时采集,如实时飞行速度、航迹角、当前位置经纬度和无线电高度等信息。用SQL 数据库平台建立全球地形数据库,数据库的基础数据采用90m 分辨率精度的全球高程数据和具有15m 分辨率精度的数字正射影像图。对于更重要的地区,如机场周边和山区等,通过更高精度的高程数据和高分辨率的图像来覆盖原先较低分辨率的数据。
根据GDI+图像编程接口利用C#语言编程开发CDTI仪表,具有全罗盘和扩展罗盘两种模式。在World Wind平台实现地形数据库和CDTI有机融合。读取飞机当前位置一定范围内的地形,在CDTI仪表上实时显示其二维地形,地形显示范围大小可以进行人工选择控制,同时在World Wind三维地理系统中也可以通过第三人称视角来观察三维地形场景。
在CDTI仪表上除了地形显示,当危险地形或障碍物在警戒范围之内时,这个危险地形就会在CDTI仪表上被具有一定透明度的黄色覆盖原来的地形。当危险地形处在警告范围,危险地形就会被具有一定透明度的红色覆盖。通过开发的前视地形预警模块实现低空自由飞行中的近地警告功能,各功能模块之间的关系如图5所示。

图5 EGPWS仿真系统功能模块框架
3.2 仿真应用
3.2.1 仿真系统参数设定
EGPWS通过飞机的预测航迹和地形的海拔高度等信息进行前视预警功能的警戒和警告判别[9]。其中,飞机短期的航迹可以根据当前位置的经纬度,无线电高度,俯仰角和速度等进行计算。通过读取航迹范围内的地形数据库中的高程数据与飞机高度进行对比,如超过报警阈值则发出警戒与警告信息[10]。
在World Wind平台中,本文选择中国境内西南地区的一片山区进行仿真实验。加载飞行仿真插件并设定一条模拟的飞行航迹,通过外接飞行摇杆对飞机沿航迹进行六自由度的控制。
当仿真开始的时候,初始设定飞机的速度V 为250km/h,从无线电高度h为1000m 沿航线飞行。此时通过飞行摇杆控制飞机恒定俯仰角θ下降,下降速度为10m/s。假设飞机当前位置的地形高度为h0,当飞行t时刻后,飞机飞行的水平距离为D,此时地形高度为h1,如果当前位置飞机高度小于垂直安全距离Δh则触发警告,提醒飞行员采取相应的规避措施。前视地形预警的航迹如图6所示。
正常模式下前视地形预警的警戒和警告判别条件为式(3)和式(4)
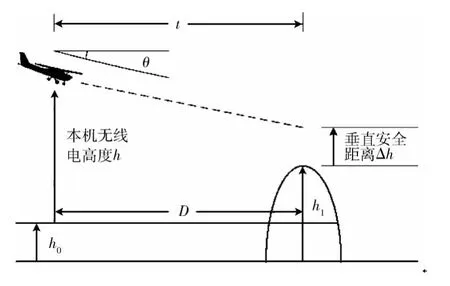
图6 前视地形预警的航迹

低空模式下前视地形预警的警戒和警告判别条件为式(5)和式(6)

World Wind平台通过SQL数据库实时搜索和更新地形数据,通过上述的判别条件,如果有危险地形或障碍物出现在警戒范围之内,CDTI上的相应地形显示将被黄色方块覆盖,同时伴随着音频警告信息 “注意地形”。如有危险地形或障碍物出现在警戒范围之内,CDTI上的相应地形显示将被红色方块覆盖并显示红色 “PULL UP”字样,同时伴随着音频信息 “地形,地形拉起”。
3.2.2 结果分析
因为EGPWS的前视地形预警具有两种模式:正常模式和低空模式,所以本文在World Wind平台中以正常天气和大雾天气两种情况进行实验仿真,在较好的目视飞行条件下低空模式的仿真结果如图7和图8所示。图7为World Wind平台中三维地形场景的仿真效果图;图8(a)是根据飞机当前的位置在CDTI显示附近的地形地图;图8(b)为开启前视地形预警功能后,CDTI上的警戒和警告地形范围内,有危险地形或障碍物出现时,地形被黄色或红色方块覆盖的仿真效果图。

图7 低空模式下三维地形场景显示

图8 CDTI显示
当在不适合目视飞行规则的天气条件下,采用正常模式。在World Wind中模拟大雾天气来进行此模式的仿真,仿真结果如图9和图10所示。图9为在World Wind平台中正常模式下三维地形场景的仿真效果图,在图10(a)中根据飞机当前的位置在CDTI显示附近的地形地图,图10(b)为开启前视地形预警功能后,CDTI上的警戒和警告地形范围内,有危险地形或障碍物出现时,地形被黄色或红色方块覆盖的仿真效果图。
由于在World Wind中模拟大雾天气,前视地形预警切换为正常模式,地形显示范围从2.5海里变为5 海里,从仿真结果看出图10(a)显示地形范围是图8(a)的两倍,符合实际情况的要求。同时,正常模式下前视地形预警的警戒和警告时间也比低空模式有所增加,从图10(b)中可以看出,当开启前视地形预警功能后黄色和红色方块的报警区域范围也比图8(b)中有所增加。当在仿真中产生了近地报警提示的时候,飞机的飞行状态也从 “FLIGHT GOOD”变成 “PULL UP”的红色字样进行相应的报警提示,如图8(b)和图10(b)所示。仿真结果与实际情况相一致。
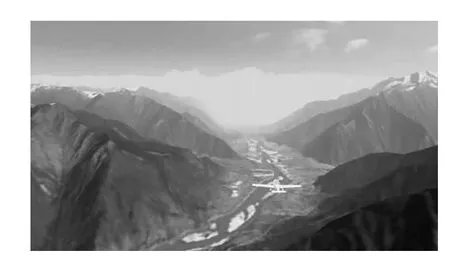
图9 正常模式下三维地形场景显示
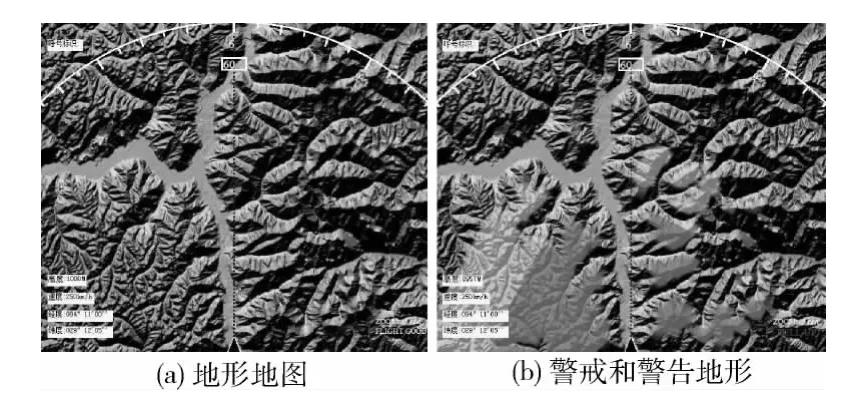
图10 CDTI显示
4 结束语
本文通过对增强型近地警告系统的功能和工作流程的研究,基于World Wind三维地理系统平台进行二次开发,设计了适用于通用航空中小型飞机的EGPWS 仿真系统,实现了对全球地形数据的快速搜索和更新、地形显示模块、前视预警模块和飞行仿真模块,在CDTI和World Wind中可以对大量地形数据进行实时渲染并显示为二维和三维地形地图。通过三维仿真实验,验证了该系统具有良好的实时地形显示功能和提供准确的警告信息。能满足EGPWS的设计需求,具有实际应用的可行性和广阔的前景,为开发适用于通用航空的EGPWS提供可靠的参考。
[1]LIU Liansheng,CHEN Daiwei.Characteristics of ground proximity warning system enhancement and implementation[J].Journal of Civil Avation University of China,2007,25(1):120-121 (in Chinese).[刘连生,陈戴维.增强型近地警告系统的特性与实现 [J].中国民航大学学报,2007,25(1):120-121.]
[2]SONG Dong,LI Miao,ZHOU Yuhan.The research on awareness alerting modeling and algorithm of enhanced ground proximity warning system [J].Computer Measurement &Control,2010,18 (4):871-873 (in Chinese). [宋东,李淼,周宇晗.增强型近地警告系统前视预警建模与算法研究[J].计算机测量与控制,2010,18 (4):871-873.]
[3]SONG Dong,ZHOU Yuhan,YE Hao.Digital simulation of enhanced ground proximity warning system [J].Computer Simulation,2008,25 (9):29-31 (in Chinese).[宋东,周宇晗,叶浩.增强型近地警系统建模与报警仿真 [J].计算机仿真,2008,25 (9):29-31.]
[4]ZHAO Xin.Research on the traffic and terrain collision avoida-nce system [D].Nanjing:Nanjing University of Aeronautics and Astronautics,2012 (in Chinese).[赵鑫.空中防撞与近地告警综合系统研究[D].南京:南京航空航天大学,2012.]
[5]SUN Zijun,WU Dongsu,CHAI Gongbo,et al.Research and simulation of look-ahead terrain display in enhanced ground proximity warning system of flight simulator[J].Information Technology,2013,37 (4):8-11 (in Chinese).[孙子军,吴东苏,柴功博,等.飞行模拟器EGPWS地形显示模块研究及仿真 [J].信息技术,2013,37 (4):8-11.]
[6]JIANG Wenping,XI Daping.Research on technologies of realtime simulation and warning analysis of airborne 3ddigital earth[C]//Nanjing:Remote Sensing,Environment and Transportation Engineering,2012.
[7]MA Shidong,HE Yuncheng,WANG Zhong,et al.Resear-ches on simulation and validation of airborne enhanced ground proximity warning system [C]//Zhangjiajie:Computer Science and Automation Engineering,2012.
[8]SHEN Xiaoyun,ZHAO Rui,JIAO Weidong,et al.3Dvisualization simulation of RNP flight procedure based on world wind[J].Journal of System Simulation,2012,24 (10):2131-2135 (in Chinese).[沈笑云,赵瑞,焦卫东,等.基于World Wind的RNP飞行程序三维可视化仿真 [J].系统仿真学报,2012,24 (10):2131-2135.]
[9]SONG Dong,LI Wenjuan,PEI Lin,et al.Design and simulation of terrain awareness alerting arithmetic in enhanced ground proximity warning system [J].Journal of System Simulation,2009,21 (20):6666-6669 (in Chinese).[宋东,李文娟,裴林,等.增强型近地警告系统前视预警算法设计与仿真 [J].系统仿真学报,2009,21 (20):6666-6669.]
[10]YANG Chao.Terrain awareness and warning system in civil aircraft and the simulation realization [D].Shanghai:Shanghai Jiao Tong University,2011 (in Chinese).[杨超.地形感知和告警系统 (TAWS)研究及仿真实现 [D].上海:上海交通大学,2011.]
猜你喜欢
小哥白尼(神奇星球)(2021年6期)2021-07-28
今日农业(2019年12期)2019-08-13
中国生殖健康(2019年6期)2019-01-06
小哥白尼(军事科学)(2018年9期)2018-12-08
小哥白尼(军事科学)(2018年8期)2018-09-12
小哥白尼(军事科学)(2018年6期)2018-09-10
小哥白尼(军事科学)(2018年1期)2018-05-25
现代园艺(2017年22期)2018-01-19
火控雷达技术(2016年3期)2016-02-06
汽车维护与修理(2015年1期)2015-02-28
