
基于机器学习的超宽带NLOS鉴别方法
2014-12-23 01:29李伟杰张霆廷张钦宇
计算机工程与设计 2014年3期
李伟杰,张霆廷,张钦宇
(哈尔滨工业大学 深圳研究生院 通信工程研究中心,广东 深圳518055)
0 引 言
在无线定位技术中,基于TOA(time of arrival)估计的超宽带定位技术能够利用它极高的时域分辨力,抗多径能力强,穿透能力强等特点,实现高精度定位[1]。实际定位中NLOS环境(non line of sight)是误差的主要来源之一。第一,由于NLOS引起的多径效应引起的直达分量会被误检,第二,超宽带脉冲介质中传播时会引起附加的时延,使得TOA 估计值会大于真实值。如果使用带有NLOS 的TOA 估计值进行定位将严重影响定位性能,在实际定位环境中对NLOS 进行鉴别和误差消除能够有效提高定位精度[2]。
文献[3-5]从蜂窝网络领域研究了NLOS的鉴别技术,文献[3]基于扩展卡尔曼滤波角度出发,通过对新息序列的预测来进行NLOS鉴别。文献[4]根据多次测量结果求得TOA 的方差,建立了不同的假设检验模型实现NLOS 鉴别。文献[5,6]说明利用接收信号的多径分量与能量的关系可以更有效进行NLOS鉴别,文献[7]根据信号特征参数在不同信道具有不同的分布进行鉴别。
NLOS消除方面,存在两种方法:第一,根据TOA 估计值的修正,NLOS会使TOA 带来正偏差,估计出这个正偏差后可以直接对TOA 进行修正[8]。第二,定位算法层面上的消除,在鉴别出NLOS的结果后赋予不同的权重,在定位算法进行消除[9]。
现在NLOS鉴别和消除存在的主要问题有,鉴别和消除都基于不同理论模型,实际应用场景一些先验难以获取,如信道统计特性,特征参数概率密度函等。本文基于实测数据对广泛采用的参数法[7]的NLOS 鉴别方法进行验证,并参考文献[10]的方法采用一种基于非参数的机器学习方法进行NLOS鉴别,对机器学习的训练参数的选取进行分析,实现了更高的鉴别率。在此基础上对实测数据进行NLOS消除,并对不同的NLOS鉴别率对定位性能的影响进行了分析,文章实现了一种通用的NLOS鉴别模型和消除算法。
1 基于特征参量的NLOS鉴别
1.1 信号的特征参数
设计接收到的信号记为h(t)。
(1)峭度(kurtosis)

如式(1)所示,它可反映数据集中分布的陡峭程度,一般地,信号的峭度值越大,说明数据中存在较大峰值且下降明显,能量比较集中,峭度值较小,说明数据分布较为平坦,能量较为分散。
(2)超量时延(mean excess delay,MED)
(3)均方根时延(root mean quare delay spread,RMS)
峭度提供了多径分量的幅度统计信息,但不包含时延信息,超量时延式(2)和均方根时延式(3)体现了多径分量的时延特征,一般来说,NLOS 下的平均超量时延要比LOS时大,RMS时延扩展比LOS更严重。
(4)峰值能量比

式(4)定义了最强路径与信号能量比,利用多径能量差异性进行NLOS鉴别。
(5)幅度

(6)能量

在相同距离下,信号经过NLOS障碍物后的幅度式(5)和能量式(6)比LOS情况下的幅度和能量要小。
(7)采样数据均值
(8)采样数据方差

方差式(8)反映了采样数据的集中程度,NLOS情况下的采样数据会比较分散。
1.2 参数方法
文献[7]研究表明UWB信号通过IEEE 802.15.4a信道后,特征参数Kurtosis,MED,RMS的概率密度函数成对数正态分布且存在差异性。从而将NLOS鉴别问题转化为似然比检验问题,在不同信道模型下鉴别的成功率见表1。
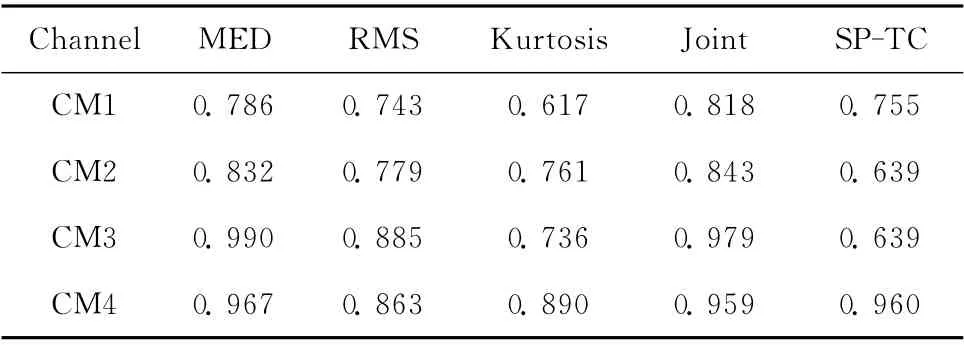
表1 参数法鉴别率
表1体现出参数法具有极高的NLOS鉴别率高,实际应用中该方法是否通用需要进行验证。我们采用Time-Domain公司的产品PulsOn 410[11]进行数据采集,该产品发出的UWB 信号的带宽为2.2GHz,中心频率在4.3GHz,采样频率为60ps,具有极好的抗干扰能力和测距精度,它采用Lead Edge Detection的TOA 估计算 法[12],在室内进行了数据采集如图1所示,该图为中国典型室内居住环境,外墙厚度为18cm,隔墙厚度为12cm,墙视为NLOS障碍物,在此环境建立了1000个LOS和NLOS信号的数据库。并对这些数据的信号特征进行了统计,图2统计了它们的MED,RMS,Kurtosis分布。

图1 测量环境
对LOS 和NLOS 情况下实测数据的特征参数进行统计,根据虚警概率Pfa=2%设定NLOS鉴别的门限值,鉴别的成功率见表2。图3对比了实测数据和理论数据采用参数法进行NLOS 鉴别的准确率,检测概率定义为Pc=P(NLOS|NLOS),虚警概率定义Pfa=P(NLOS|LOS)。
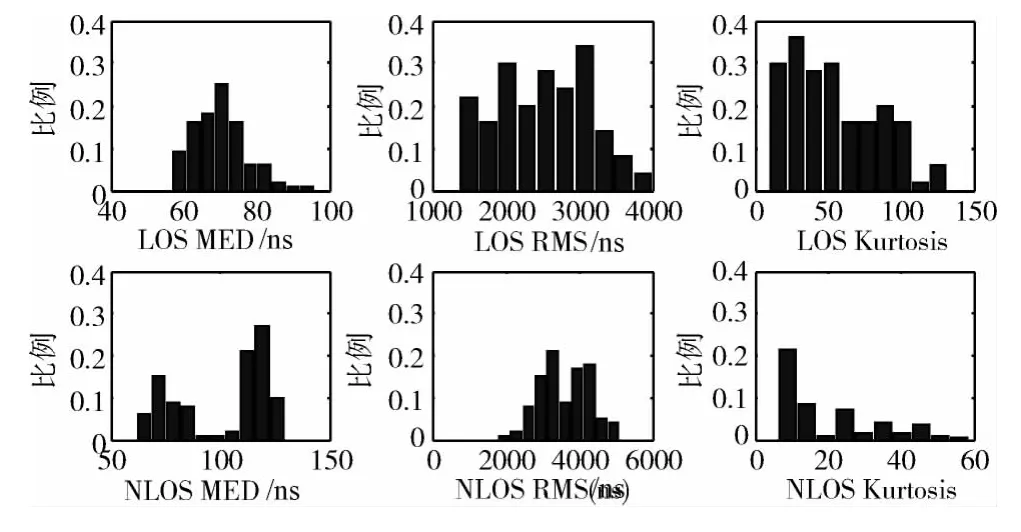
图2 LOS和NLOS下MED,RMS,Kurtosis分布对比
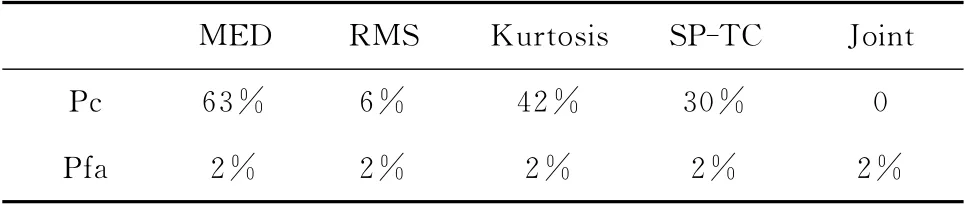
表2 实测数据鉴别率
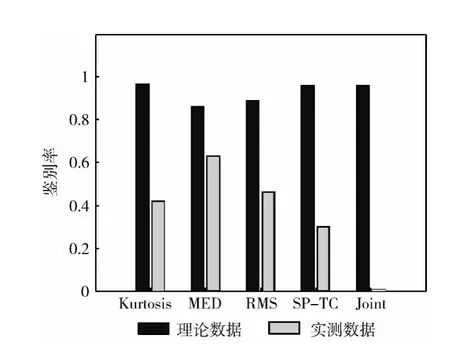
图3 仿真数据和实测数据的鉴别率比较
本节实验表明UWB 信号在室内传播中特征参数的分布并不服从函数分布。用基于门限的参数法进行NLOS鉴别,鉴别准确率远低于文献[7]的结果,参数法在该典型室内中进行NLOS鉴别失效。
2 基于LS-SVM 的NLOS鉴别
2.1 LS-SVM(least square-support vector machine)介绍
由第1节可知,实际环境中采用参数法进行NLOS鉴别方法鉴别率低,在这种参数的总体分布类型未知条件下,应该采用非参数的方法进行NLOS鉴别[13]。
基于机器学习的LS-SVM 是非参数的分类方法,它的优点有:①对于线性不可分的情况,通过映射算法转化为高维特征空间使其线性可分;②SVM 学习问题可以表示为凸优化问题,可以利用已知的有效算法求解目标函数的全局最小值。SVM 的优点使得它能成为非参数分类方法的首先技术,利用SVM 进行NLOS分类学习的目标是构造一个判别函数(分类器),将数据尽可能正确地分类,其示意图如图4所示。
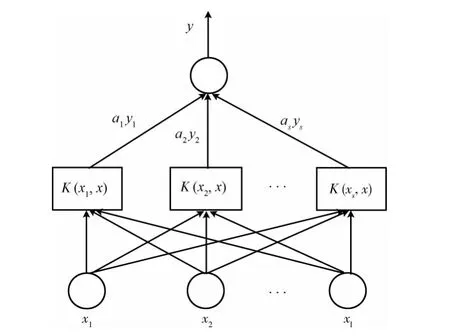
图4 LS-SVM 分类器
该图对输入向量为x=(x1x2…xl),即对l个信号进行分类,xi∈RN为一个UWB 信号提取的N 个特征参数,S个支持向量通过核函数K(x,x)对输入进行非线性变换,输出y=(y1y2…yl)取值为1和-1用于表示LOS和NLOS情况。更深入的内容LS-SVM 原理介绍参见文献[14]。
2.2 基于LS-SVM 的NLOS鉴别性能
根据1.1小节所选的参数作为训练参数,对数据进行划分,用训练数据(20%)训练出相关的参数,再将测试数据(80%)测试下分类器的效果,结果见表3。
表3 不同特征参数的鉴别率
本节仿真说明:①采用多个参数进行联合检测时能够使性能提高很多;②跟参数法鉴别的方法相比,在相同的虚警概率下,基于LS-SVM 的NLOS鉴别方法在检测概率高25%以上;③采用全部特征参数(MED,RMS,Kurtosis,幅度,能量,SP-TC,均值,方差)进行机器学习,训练出来的分类器具有较优的性能,检测概率可以达98%,虚警概率只有1%,相比较现有方法而言在性能上有较大提高。
2.3 NLOS误差消除
图5为LOS和NLOS情况下的测距误差统计,从图中可知NLOS情况下误差都偏大,这是由于UWB 信号通过障碍物的附加时延引起的。
图5 误差统计
根据LOS和NLOS误差的统计分布,可以采取如下方法进行NLOS消除,LOS情况下采取=+Δ1,NLOS情况下采取=-Δ2。误差消除前和消除后的概率分布曲线如图6所示。
图6 误差消除
定位性能如图7所示,仿真条件说明:①定位区域为半径R=10m 的圆内,锚节点数量为N=10在圆上均匀分布;②目标节点与10个锚节点都属于NLOS情况;③测距误差根据实测数据的误差建立的数据库中随机选取;④鉴别后对于LOS采用=+Δ1,对于NLOS采用误差消除=-Δ2;⑤在④的基础上采用Taylor算法处理[15]。
图7 定位性能
从图7可以看出,经过NLOS鉴别后,再进行误差消除,效果明显。定位结果在0.5m 以内的误差经过消除前在占80%,经过消除后95%,性能提升15%。
3 结束语
传统的NLOS鉴别方法通常采用IEEE 802.15.4a信道模型,该模型与实际环境相比存在较大的差异,利用该模型实现的NLOS鉴别方法在实际场景中出现较低的鉴别率,我们的实验从接收到的UWB 信号提取特征参数进行机器学习来实现NLOS 鉴别,研究表明提取的特征参数越多,鉴别率越高。这种非参数的NLOS 鉴别方法与信道独立,不需要先验知识,鉴别率高,适用范围广。在鉴别的基础上,根据先验统计进行误差消除,可以有效提高定位精度。该文章能有进行NLOS鉴别,为实现室内高精度定位的实现提供了理论基础。
[1]Gezici S,Poor H V.Position estimation via ultra-wide-band signals[J].Proceedings of the IEEE,2009,97 (2):386-403.
[2]Qi Y,Kobayashi H,Suda H.Analysis of wireless relocation in a non-line-of-sight environment[J].IEEE Transactions on Wireless Communications,2006,5 (3):672-681.
[3]Yu K,Guo Y J.NLOS error mitigation for mobile location estimation in wireless networks [C]//IEEE 65th Vehicular Technology Conference.Spring,2007:1071-1075.
[4]Schroeder J,Galler S,Kyamakya K,et al.NLOS detection algorithms for ultra-wideband localization [C]//4th Workshop on Positioning,Navigation and Communication,2007:159-166.
[5]DIAO X,Guo FHAB.A method distinguishing line of sight(Los)from non-line of sight(Nlos)in CDMA mobile communication system:European Patent EP 1469685[P].2008-02-20.
[6]Rabbachin A,Oppermann I,Denis B.ML time-of-arrival estimation based on low complexity UWB energy detection [C]//IEEE International Conference on Ultra-Wideband,2006:599-604.
[7]Ismail G,Chia-Chin C,Fujio W,et al.NLOS identification and weighted least-squares localization for UWB systems using multipath channel statistics [J/OL].EURASIP Journal on Advances in Signal Processing.http://asp.eurasip journals.com/content/2008/1/271984,2008.
[8]Khodjaev J,Park Y,Malik A S.Survey of NLOS identification and error mitigation problems in UWB-based positioning algorithms for dense environments[J].Annals of Telecommunications-Annales Des Télécommunications,2010,65 (5-6):301-311.
[9]Jiao L,Xing J,Zhang X,et al.LCC-Rwgh:A NLOS error mitigation algorithm for localization in wireless sensor network[C]//IEEE International Conference on Control and Automation,2007:1354-1359.
[10]MaranòS,Gifford W M,Wymeersch H,et al.NLOS identification and mitigation for localization based on UWB experimental data[J].IEEE Journal on Selected Areas in Communications,2010,28 (7):1026-1035.
[11]Time Domain.Data sheet[EB/OL].[2012-06-10].http://www.timedomain.com/datasheets/320-0289D%20P410%20Data%20Sheet.pdf.
[12]Time Domain.Ranging and communication application programming interface specification[EB/OL].http://www.timedomain.com/datasheets/320-0282E% 20RCM% 20API% 20Specification.pdf,2012.
[13]Wasserman L.All of nonparametric statistics [M].NY:Springer New York,2006.
[14]Suykens J A K,De Brabanter J,Lukas L,et al.Weighted least squares support vector machines:Robustness and sparse approximation [J].Neurocomputing,2002,48(1):85-105.
[15]Zhang H,Yu M,Cui X,et al.An improved Taylor series based location algorithm for IEEE 802.15.4achannels[C]//IEEE Pacific Rim Conference on Communications,Computers and Signal Processing,2011:499-503.
猜你喜欢
空间科学学报(2020年1期)2021-01-14
通信电源技术(2020年8期)2020-07-21
中国交通信息化(2019年12期)2019-08-13
电子制作(2019年23期)2019-02-23
知识经济·中国直销(2017年12期)2018-01-03
制造技术与机床(2017年11期)2017-12-18
北京航空航天大学学报(2017年4期)2017-11-23
中国交通信息化(2017年8期)2017-06-06
系统工程与电子技术(2016年7期)2016-08-21
现代防御技术(2016年1期)2016-06-01
