
基于ARM和CPLD的毛巾织机主控系统设计
2014-12-19 01:45:26郝同弟周其洪
制造业自动化 2014年7期
郝同弟,周其洪,陈 革
HAO Tong-di, ZHOU Qi-hong, CHEN Ge
(东华大学 纺织装备教育部工程研究中心,上海 2 016202)
0 引言
毛巾织机是剑杆织机的一种,相较于普通剑杆织机,毛巾织机多一个经纱轴即天经轴[1],主要用于形成毛巾地组织表面的毛圈,因此对控制系统有更高的要求。现阶段毛巾织机主要存在毛圈高度不平整、织机车速受限、经纱张力不均匀、不能织超高密毛巾织物等诸多不足。因此有待对现有的毛巾织机进行技术改革,满足国内外市场需求[2]。针对现阶段的不足以及高档毛巾织机的发展需求,设计了以ARM处理器为核心,采用ARM和CPLD相结合的织机主控系统。
1 系统整体结构
毛巾织机的控制系统由主控系统和送经卷取系统构成,整体框架结构如图1所示[3]。主控制器主要实现五大功能:控制主轴电机、实现人机交互、输入信号检测、控制各种外围接口模块以及与送经卷取控制器通信。主控制器通过对主轴编码器信号、断纬断经信号、人机界面输入参数等进行实时检测,结合毛巾织造要求,对主电机、选纬控制器、电子多臂等进行控制。为实现用户工艺参数的输入,人机界面采用带触摸功能的显示屏,是个相对独立的嵌入式系统。

图1 毛巾织机控制系统整体结构
2 系统硬件设计
2.1 控制器主控芯片选型
毛巾织机的整体结构复杂,有大量的被控对象,因此主控系统采用以ARM和CPLD相结合控制方式[5]。ARM为主控芯片,CPLD为协处理器。ARM选用STM32F207ZET6芯片,最高频率120MHz,拥有强大的计算能力,具有专门用于电机控制的高级定时器、12位的A/D和较低的CPU占用率,片内资源非常丰富[6],能够很好的满足毛巾织机控制系统的要求。
由于主控系统的控制对象多,采用CPLD扩展系统的I/O口,选用EPM570T144C5芯片,它有570个宏单元,144个引脚,其中有116个通用I/O口[7]。系统通过CPLD协助ARM控制选纬器、电子多臂以及各个外部信号输入输出模块。通过CPLD不仅大大扩展了ARM的I/O口,而且可以对各种输入信号进行预检测和预处理,减轻了ARM的负荷,使得CPU能够有更好的实时性、抗干扰性和扩展性,满足毛巾织机系统快速响应的要求。主控系统的硬件结构框图如图2所示。
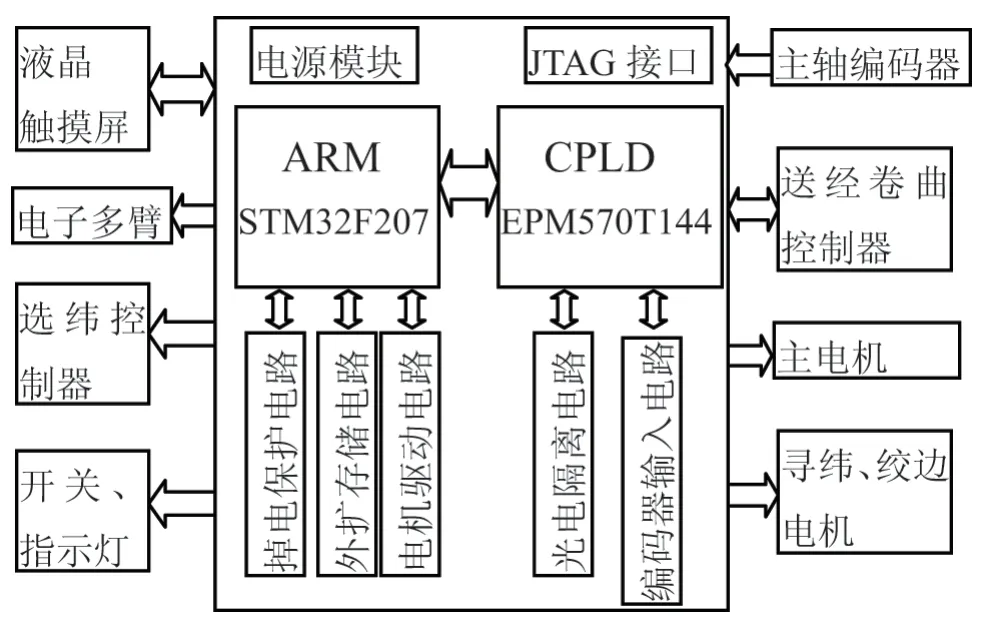
图2 主控系统硬件结构框图
2.2 主控制器部分外围硬件电路
2.2.1 电源电路
主控制器需要多个供电电压。STM32微控制器和CPLD供电电压均为3.3V供电,485、CAN以及USB通信模块采用5V电压,织机输入信号选用的PS2801-4光耦的输入上拉电压为24V,而输出信号的光耦PS2801-4采用15V的上拉驱动电压,因此系统采用24V开关电源供电。通过LM2596-5.0芯片把24V电压转为5V,然后采用LM1117-3.3得到3.3V电压,选用用MC7815芯片实现电压24V到15V的转换。
2.2.2 电机控制电路
主控系统需要控制的电机有主轴伺服电机、寻纬电机以及绞边步进电机,利用ARM定时器产生的PWM脉冲控制电机。采用2片双路HCPL2530有源高速光耦芯片实现主控制器与伺服驱动器的隔离,该芯片最快速度达1MBit/s,完全满足电机的控制要求。为提高系统抗干扰能力,采用差分信号模式控制,选用AM26LS31芯片实现此功能。同时选用74HC14触发器来改善输出脉冲波形质量,保证输出脉冲的清晰、无抖动。
2.2.3 通讯电路设计
1)主控制器与上位机和液晶屏通讯
STM32F207主控制器有4路USART接口,主控系统与PC机和液晶触摸屏通讯均采用USART通讯。液晶屏选用海泰克的5.7 寸人机界面PWS6600S-S,由于RS232工作电压为5V,因此采用MAX3232C实现电平的转换。
2)主控制器与其他子系统通讯
主控制器还需和送经卷曲控制器进行通讯,采用基于CANopen协议的CAN通讯方式。可以通过此通讯设置送经卷曲的各种参数,如经轴初始直径、PID参数、纬密等。选用PCA82C250作为通信芯片,由于CAN最高速度可达1Mbps,因此选6N136高速光耦芯片来隔离干扰,该芯片支持最高速率1Mbps,电路图如图3所示。
2.2.4 外扩存储电路
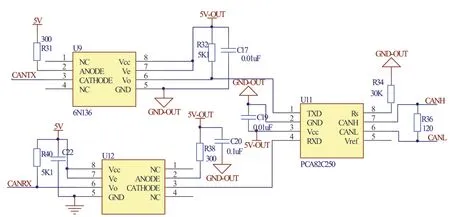
图3 CAN通讯硬件电路
由于主控系统中需存储操作系统代码,在线测试时需用到大量的数据暂存空间以及掉电保护事需存储保护数据,因此在系统中外扩一片64K型号为IS61LV6416的SRAM。数据线和读写控制线与ARM主芯片相连接。由于ARM最高工作频率达到120MHZ,因此存储芯片需有较快的读写速度,否则会影响系统的实时性。该款芯片的读写时间是10ns,速度完全满足要求。在设计中,采用FSMC的NOR/PSRASM模式来读写存储器。把存储器的片选线、读写控制线、16位地址线、16位数据线分别于主控ARM相连。
2.2.5 掉电保护模块
掉电保护电路主要目的是当系统掉电时为RAM提供备用电源,保证掉电后系统需要存储的重要数据不丢失。电路原理如图4所示,正常情况时,电源输出3.3V电压通过二极管D6给RAM供电。当供电电压过低时,3.6V锂电池通过二极管D8、D7给RAM供电,保证RAM里面数据不会因外界的掉电而丢失。

图4 掉电保护电路
本系统采用的锂电池不可充电,因此需要考虑电量不足时的替换,设计检测电路如图5所示,VREF参考电压为2.5V,因此当检测到的锂电池电压低于2.8V(此时给RAM供电电压约2.4V,恰好是RAM供电最低电压)时,电压比较器UPC393给NPN型三极管Q6提供导通电压,三极管处于饱和状态,同时二极管LED12发光,提醒用户更换锂电池,实现电池电量的实时监控。
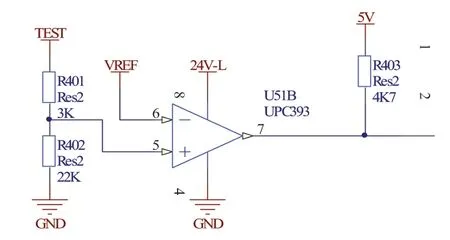
图5 电池电量检测电路
3 软件实现
为了更快速的进行软件设计、更方便的控制各个任务模块,对本控制系统移植uClinux操作系统[7]。uClinux是个多任务操作系统,相较于标准Linux有更小的内核,具有良好的稳定性和移植性。由于主控系统是个典型多任务系统,因此采取单进程多线程的方式设计系统的应用程序。通过移植操作系统大大提高程序编写效率和稳定性。
3.1 控制器ARM程序
主控系统ARM程序采用模块化设计理念,软件的总体流程图如图6所示,在系统开机上电后,首先进行初始化操作如启动uClinux操作系统、设置串口波特率等。然后配置并开启中断,通过扫描输入信号,同时对主轴编码器信号、液晶触摸屏参数、探纬信号等各种信号进行检测,结合毛巾的织造要求判断当前所需的织造状态,并对选纬器、电子多臂、各个电磁铁、主电机和寻纬绞边电机等各个模块进行控制,不同的织造状态有不同的控制要求。同时通过中断方式实现控制所需的其他功能,如当出现断纬、断经状况时,会产生中断,系统响应该中断并立即停车。同时每个织造状态也通过中断实现织机五大运动之间的切换。以点动为例,当检测到开口动作信号时主控系统驱动电子多臂和主电机旋转实现开口,通过主轴编码器检测到开口动作完成时系统产生中断,当产生下一个点动信号时,系统响应该中断并控制选纬器进行选纬动作,通过此方式实现开口、引纬、打纬、送经、卷曲这五大动作。
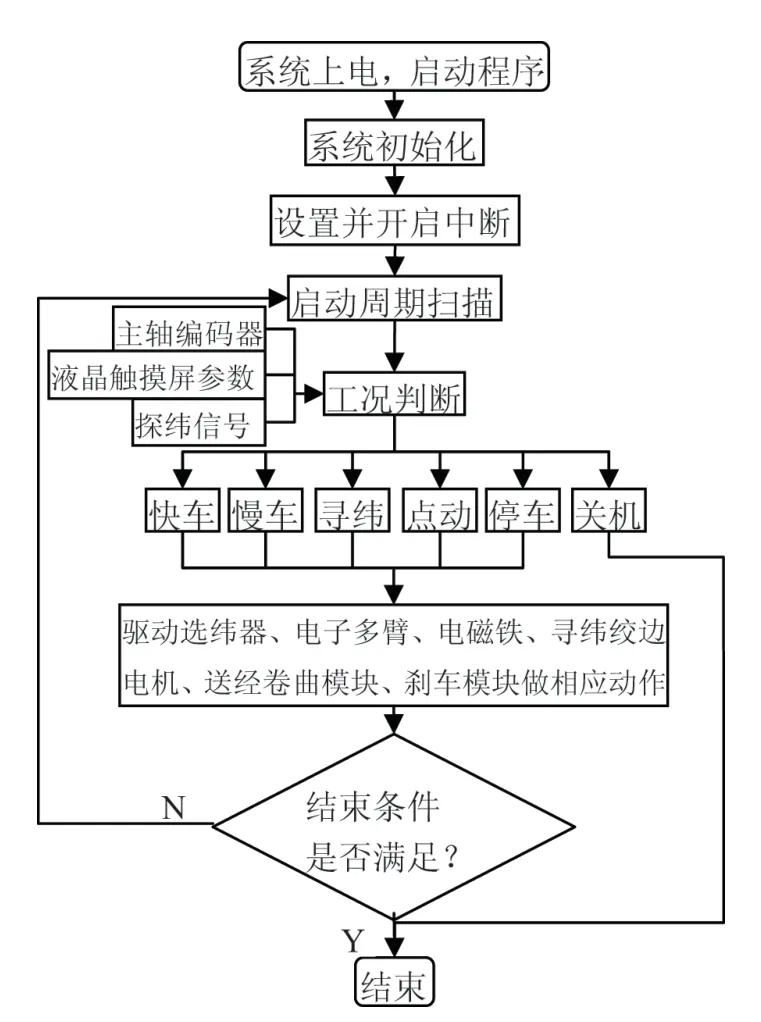
图6 主控系统软件模块图
3.2 控制器CPLD程序
控制系统中CPLD芯片EPM570T144C5采用VHDL语言编程,主要任务是检测和接收外部包括指示灯、主轴编码器在内的输入信号,进行预处理之后发送给ARM芯片处理,同时接收ARM传输过来的包括电子多臂和选纬控制信号在内的输出信号。输入信号的采集、数据预处理、中断管理、输出信号的控制等CPLD程序均以Process形式存在,且这些Process程序相互间是并行关系。每次启动控制系统时,CPLD会自动运行,检测和接收外部的输入信号,把该信号处理后发送给ARM芯片,同时也接收ARM发送过来的信号,按照ARM要求控制信号的输出,程序流程如图7所示。

图7 CPLD程序框图
系统的硬件电路以及液晶触摸屏如图8所示。

图8 系统硬件电路和液晶触摸屏
4 结论
本文针对现阶段毛巾织机的缺陷和不足,设计了毛巾织机的主控系统。采用以ARM和CPLD为核心的控制方式,具有良好的可扩展性和灵活性,只需稍作修改就能够应用于不同类型的毛巾织机上。目前,该主控系统的调试工作已经完成,运行结果表明主控系统能稳定、有效的完成毛巾织机各种织造要求。
[1]刘永亭.用PLC实现毛巾织机天经系统控制[J].电气时代,2008,(4):21.
[2]陈登,梁海顺.浅谈国内毛巾织机的技术改造和革新[J].江苏纺织,2005,(4):22-26.
[3]章玉铭.毛巾剑杆织机的控制系统设计[D].浙江:浙江工业大学,2011.
[4]陈剑斌,田联房,等.基于ARM的自主移动机器人控制系统设计[J].机械设计与制造,2011(6):160-162.
[5]孙书鹰,陈志佳,等.新一代嵌入式微处理器STM32F103开发与应用[J].微计算机应用,2010,31(12):59-63.
[6]田泽.嵌入式系统开发与应用[M].北京:北京航空航天出版社.2005:374-507.
[7]沈洪锐,沈晓虹.基于ARM和uClinux动态Web实现对步进电机的控制[J].机床与液压,2011,39(14):94-96.
猜你喜欢
作文大王·低年级(2022年11期)2022-05-30 10:48:04
作文小学中年级(2021年4期)2021-12-28 09:55:40
孩子(2019年8期)2019-08-26 05:43:32
纺织科学研究(2017年4期)2017-05-17 04:00:07
纺织科学研究(2017年1期)2017-05-17 03:59:24
发明与创新(2016年23期)2016-10-13 02:16:14
现代工业经济和信息化(2016年12期)2016-05-17 05:37:55
湖北工业大学学报(2016年5期)2016-02-27 13:14:51
化纤与纺织技术(2015年1期)2015-12-26 03:33:42
河南科技(2014年10期)2014-02-27 14:09:18
