
基于DMD的红外目标模拟器光学系统的设计
2014-12-07 06:57顾法权张宁徐熙平乔杨
长春理工大学学报(自然科学版) 2014年6期
顾法权,张宁,徐熙平,乔杨
(长春理工大学 光电工程学院,长春 130022)
红外制导导弹主要具有探测手段隐秘、抗干扰能力强等特点,在红外成像制导的设计、实验与仿真过程中,需要对红外成像系统的导引头进行测试与评估。传统的方法为进行大量的外场飞行试验,然而这种方式实验周期长,可重复性差。所以需要在实验室内进行半实物仿真来模拟生成红外景象,对系统进行测试。
目前红外目标模拟器主要分为直接调制型和辐射调制型两种。本文在设计过程中采用了属于辐射调制型的数字微镜阵列(DMD)技术,这种方式具有图像分辨率高、图像刷新频率高、图像灰度等级可精确控制、全数字化等优点,在红外成像系统仿真测试中受到越来越多的关注。
1 系统的基本组成与工作原理
基于DMD的红外景象仿真系统主要由黑体光源、照明系统、分光棱镜、数字微镜阵列(DMD)和投影系统等构成。
DMD器件是以微电子机械系统为基础的反射式空间光调制器,它在数字芯片上集成了成千上万个可绕对角线转动的微反射镜,每个微反射镜都受到独立控制,实现对光线的偏转。DMD有三种状态,开状态为+12°,平状态为0°,关状态为-12°。工作状态如图1所示。
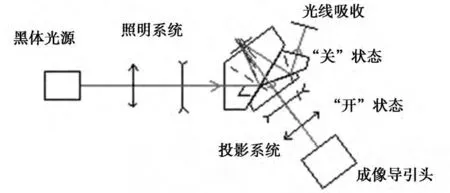
图1 系统工作原理
由黑体光源发出的光线进入照明光学系统,照明系统使入射光线均匀照射到DMD表面,当DMD为开状态时,反射光线与入射光线夹角为24°,反射光线进入投影系统,并经投影系统将像投射到成像导引头上;当DMD为关状态时,反射光线与入射光线夹角为72°,不能进入投影系统而被吸收。通过控制每个微反射镜开与关状态的频率,调节仿真图像的温度,以实现对无穷远处红外图像的模拟。DMD参数如表1所示。

表1 DMD技术参数
2 光学系统设计
本文中光学系统主要采用远心光路结构进行设计,通过TIR棱镜将投影系统与照明系统相连接。远心光路结构使照明光线入射角分布均匀,从而使投影图像灰度均匀;使入瞳位于无限远,保持放大倍率不变;TIR棱镜置于照明系统与投影系统之间,缩短光路长度,同时减小投影系统的后工作距,减小系统尺寸;由于远心结构的采用,使得照明系统与投影系统可以相互独立设计。
2.1 照明系统
系统采用科勒照明,科勒照明将光源成像在投影系统的入瞳处,使光源的每一点都对物面进行照明。即使是非均匀发光体作为光源时,也能实现均匀照明。虽然科勒照明结构相对比较复杂,但是可以使图像实现较高对比度。
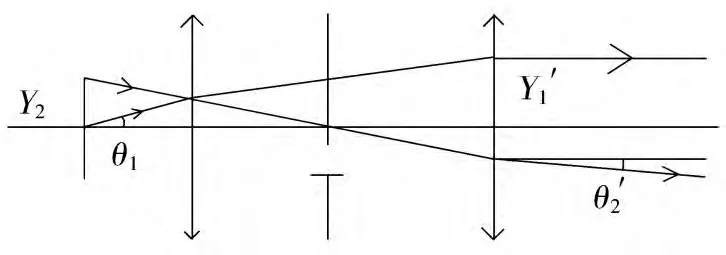
图2 照明系统示意图

由公式(1)可计算出sinθ1=0.18。所以照明光学系统的数值孔径NA=n⋅sinθ1=0.18。系统工作波段为8~12μm,选择锗和硫化锌作为透镜材料,使光源均匀照明DMD表面,设计结构如图3所示。
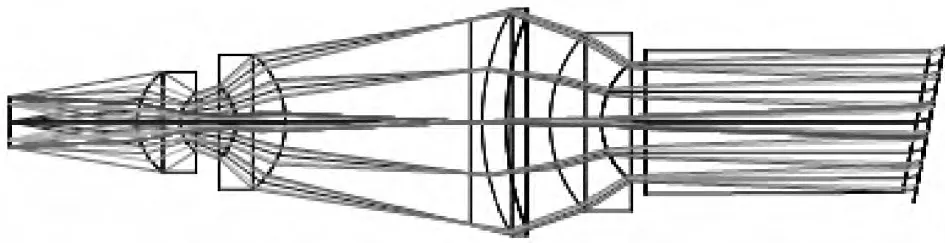
图3 照明系统结构图
2.2 TIR棱镜
TIR棱镜工作原理:光线经照明光学系统后进入棱镜,在棱镜1斜面处发生全反射,到达DMD表面,当DMD处于开状态时,光线在棱镜1斜面处折射,从棱镜3处出射;当DMD处于关状态时,光学进入棱镜2,在棱镜2斜面处发生全反射,不会进入投影系统。
本系统采用硫化锌作为棱镜的材料,硫化锌的折射率随着波长的增加而减小,在远红外波段折射率变化较小,适合作为TIR棱镜的材料。
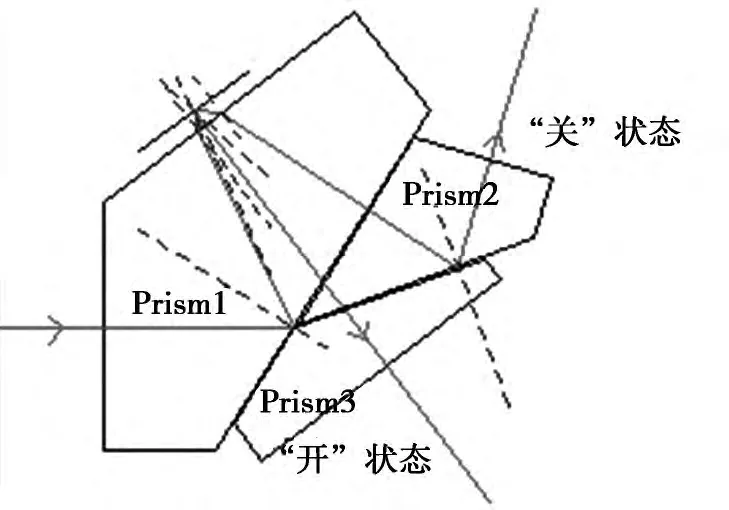
图4 TIR棱镜结构图
2.3 投影系统
由系统的工作原理可知,DMD表面为投影系统的物面,且出射光为平行光,在这种情况下,投影系统的设计采用反向设计,实际中的入瞳在反向设计时作为系统的出瞳。相当于物镜将无穷远处像成在DMD表面。
为使投影系统的出瞳与导引头有效匹配,以提高光能利用率和避免杂散光进入导引头从而降低图像分辨率,本系统将出瞳放置在投影系统第一块透镜之前。为保证投影系统输出的能量能够完全充满导引头的入瞳,则要求投影系统的出瞳应该稍大于导引头的入瞳。红外系统导引头参数如表2所示。

表2 红外导引头技术参数
投影系统不仅要与红外导引头相匹配,同时还要与照明系统相匹配。在与照明系统的匹配过程中,主要通过使投影系统的拉赫不变量大于照明系统的拉赫不变量,来使照明系统的光线通过投影系统被充分利用,投影系统光路如图5所示。

图5 投影系统示意图
在图5中:
根据照明系统最大照明角度,uDMD取8.5°,由公式(2)得出F/#=3.4。为使投影系统与红外导引头相匹配,系统出瞳应大于导引头入瞳,取系统出瞳D为120mm。则 f′=405mm。
为满足投影系统小型化的要求,选择了四片透镜的初始结构。由于系统工作在8~12μm波段,考虑到红外材料高折射率低色散的特性与满足消色差的要求,选取锗和锡化锌作为投影物镜的材料。最终设计结构如图6所示。
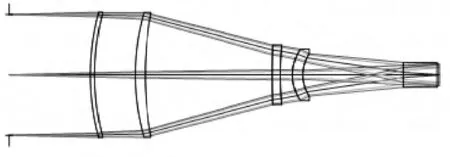
图6 投影系统结构图
3 设计结果分析
3.1 光学系统整体建模
由于系统采用了远心光路结构,得以使照明系统与投影系统分开设计。在这里,将通过对照明系统、TIR棱镜、投影系统进行整合,以实现系统的整体建模,模型如图7所示。
由图7可以看出,在DMD处于“开”状态时,入射光经DMD反射进入投影系统,产生平行光出射;而在DMD处于“关”状态时,入射光不会进入投影系统。通过对DMD“开”“关”状态的控制,实现对出射光线进行调制,生成红外图像。

图7 DMD处于开/关状态时整体模型
3.2 像质评价
由于红外导引头的分辨率为320×240,像元尺寸为25μm,对应的空间分辨率为20lp/mm,所以主要考察投影系统在10lp/mm处的传递函数。如图8所示,所有视场的MTF在10lp/mm处都大于0.5,像质良好。
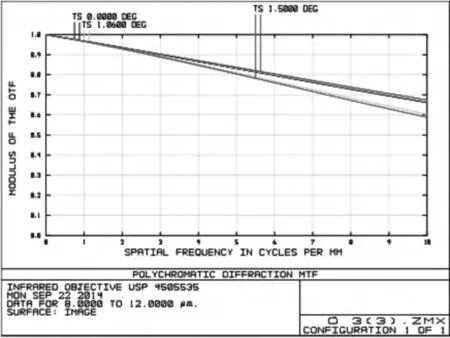
图8 投影光学系统在10lp/mm处的MTF曲线

由公式3得艾里斑半径R=41.5μm,由图9可以看出,三个视场的均方根(RMS)半径分别为14.708,15.556,21.831μm,均小于艾里斑半径,像差较小,像质良好。
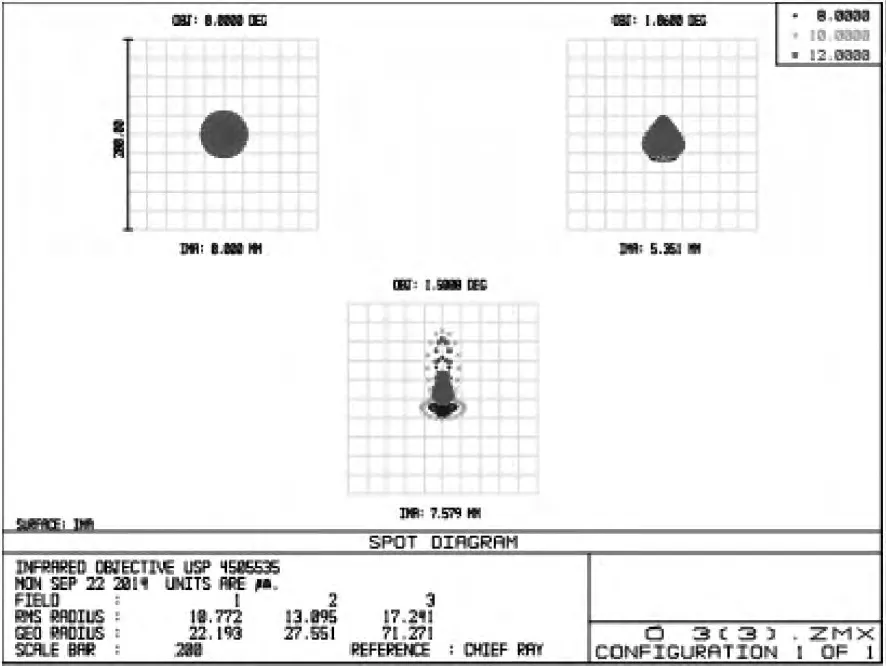
图9 投影光学系统的弥散斑
4 结论
本文研究了基于DMD的红外景象生成技术,并基于这种技术对红外目标模拟器的光学系统进行了设计。通过采用远心结构,将照明光学系统与投影光学系统分开设计,由TIR棱镜将照明与投影系统进行结合。分别对照明系统,投影系统和TIR棱镜的设计要点进行了分析,并给出了可行的具体设计结果。MTF在10lp/mm处大于0.5,弥散斑均方根半径小于衍射极限,该系统结构紧凑,性能良好。
[1]乔杨,徐熙平.消热差红外目标模拟器投影光学系统设计[J].兵工学报,2013,34(4):431-436.
[2]乔杨.基于DMD的双视场红外目标模拟器光学引擎的研究[D].长春:长春理工大学,2013.
[3]王云萍,赵长明.基于DMD的动态红外景象仿真系统[J].红外与激光工程,2009,38(6):966-970.
[4]曲兆俊,吴玲.基于电阻阵列红外场景投射的准直光学系统设计[J].红外技术,2009,31(8):446-449.
[5]Dewald D Scott.Using zemax image analysis and user-defined surfaces for projection lens design and evaluation forDigitalLightProcessing projection system[J].Opt.Eng,39(7):1802-1807.
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
少儿美术(快乐历史地理)(2020年4期)2020-02-24
学苑创造·A版(2019年4期)2019-05-10
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
