
电场仪球形传感器涂覆方案研究
2014-12-04 01:02吴先明李得天霍红庆马勉军雷军刚王佐磊
真空与低温 2014年5期
吴先明,李得天,霍红庆,马勉军,雷军刚,王佐磊
(兰州空间技术物理研究所 真空技术与物理重点实验室,甘肃 兰州 730000)
0 引言
电场仪是用于电离层中电场探测的仪器[1-7]。主动式双探针测量空间电场能够达到很高的精度。采用金属球外表面增加涂层的方法抑制纯金属球较高的光电效应。考虑到导电、隔热等性能,采用环氧树脂石墨材料DAG213作为涂层材料[8]。在电场仪空间工作寿命范围内,涂层主要满足抗紫外腐蚀,根据国外经验,涂层的厚度不低于30μm,另外电场仪的精度要求很高,需要两传感器具有优异的一致性,对涂层的均匀性提出了更高的要求,基于上述原因,要求涂层厚度在30~40μm。
手工喷涂的均匀性不能满足要求,且工艺稳定性差,工艺参数难以控制,需要改进喷涂工艺完成电场仪球形传感器的涂覆工作。
1 涂覆方案
1.1 总体方案
本方案将球形传感器沿其短杆方向与步进电机连接,如图1所示。短杆方向为经度方向,于是同一纬度上涂层的均匀性由电机带动传感器转动实现。喷枪固定于机械臂上,如图2所示,机械臂能够带动喷枪沿传感器短杆方向,以固定高度作匀速运动。喷枪口、挡板开口的中心,以及传感器的球心在同一条直线上,与底板垂直。同一经度不同纬度传感器表面涂层的均匀性,通过在喷枪和传感器之间增加带开口的挡板实现。

图1 传感器转动安装布局示意图
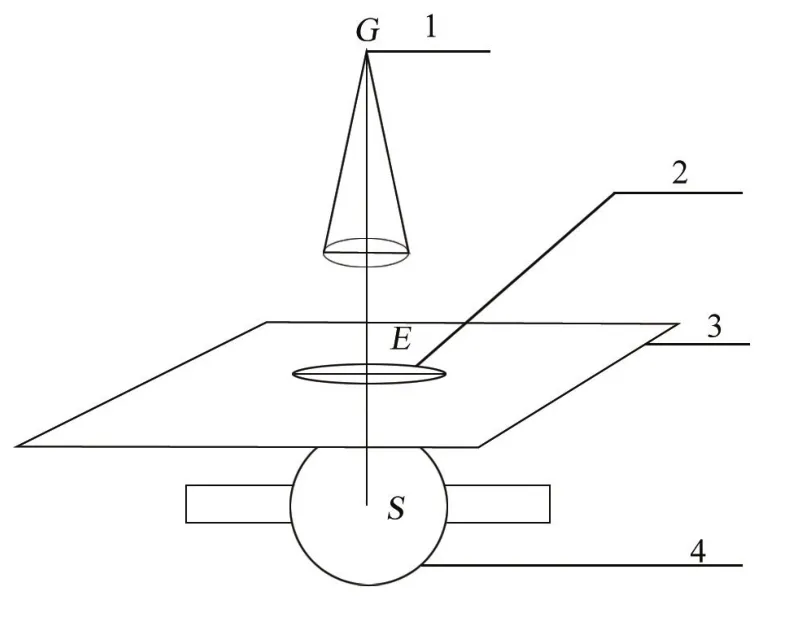
图2 喷涂方案示意图
1.2 档板开口形状的确定
设底板平面为x-y平面,将挡板开口和球形传感器投影至x-y平面内,如图3所示。为表达清晰,将挡板上开口曲线和球形传感器的投影分别置于坐标系1和坐标系2内,两坐标系y轴重合,x轴平行,两坐标系原点在y方向错开一段距离。对于挡板上的开口曲线,考察线段EF上部的部分。图中h表示曲线的纵坐标。
为确定档板上开口的形状,首先不考虑喷涂到传感器上涂料的发散角,即涂料垂直落到球面上。设落到挡板开口x-x+dx处的涂料的平均密度为ρ(x),xx+dx对应球形传感器的球台侧面积为ds,球形传感器的半径为R。由图3看出,为使落到球面上的涂料均匀,喷到球面上宽度为dx的环带上的单位面积上涂料量应为常数,于是有:

其中:

于是有:

得到挡板开口曲线的纵坐标与横坐标之间的函数关系为:


图3 传感器与挡板开口微元分析图
假定喷斑覆盖挡板开口的部分是均匀的,则ρ(x)是常数,于是挡板上开口形状曲线为h=k1,即不考虑喷枪出料的发散角的前提下,挡板上的开口为矩形,其中k1是与喷枪的出料速率以及挡板开口最宽处长度有关系的常数。
在实际喷涂过程中,由于喷枪的出料为圆锥形,在喷枪沿经向运动过程中,除两极外传感器上每点都涉及两次重复覆盖的过程,而两极各只存在一次重复覆盖的机会,于是需要在两极增加引导段如图4所示,以使两极获得两次重复覆盖的机会。
矩形宽度值的确定如图5所示,l1与l2之间的距离与短杆的直径相等,则喷涂在矩形CDMN之间的球面上的涂料均匀,如果矩形开口的宽度大于短杆的直径,即开口为l3和l4两条直线,则图中矩形ABGF之间的球面上的涂料均匀。球台ABDC和球台FGMN则会由于从挡板开口穿过的涂料不全涂到球面上而导致这两个球台上的涂料不均匀,从而需要改变引导段的几何形状(甚至是引导段挡板的曲率以实现)。当然,挡板上矩形开口的宽度小于短杆的直径即1.9 cm能够保证喷涂到球面上的涂料的均匀。开口的宽度决定喷涂的时间,即喷涂总次数。
由上述讨论得到挡板上开口的形状为矩形,球形传感器的直径为3 cm,传感器两侧短杆的直径为1.9 cm,则矩形的宽度可以设定为1.9 cm。
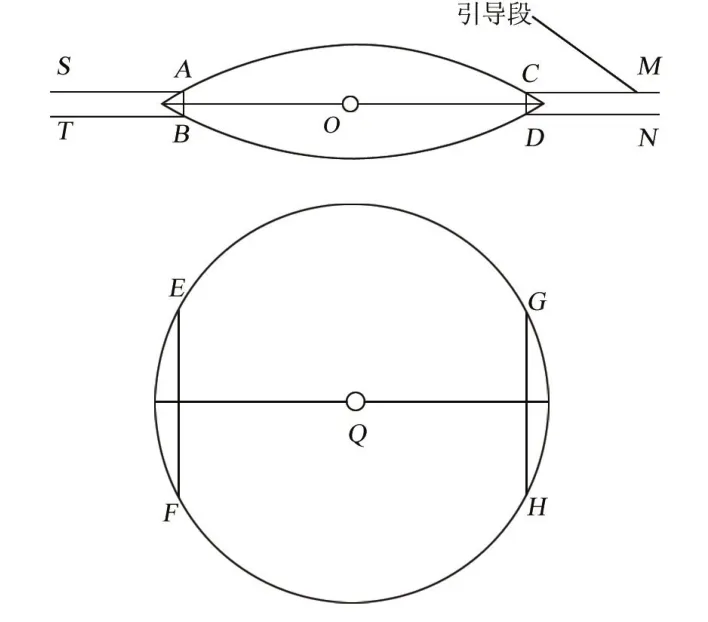
图4 挡板开口引导段
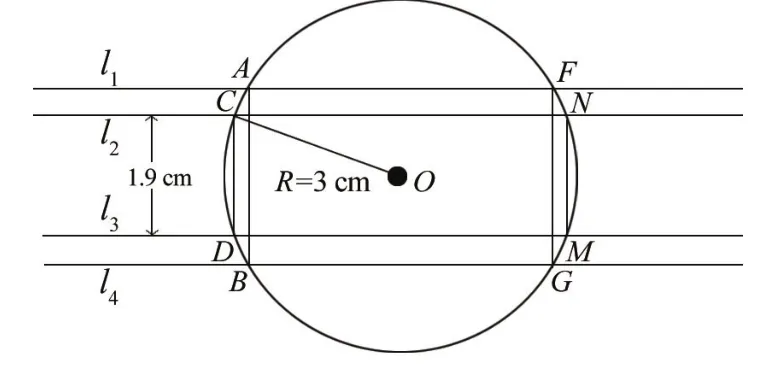
图5 挡板开口尺寸图
1.3 对挡板开口形状的修正
为了使喷涂到传感器表面的涂料均匀,需要对挡板开口的形状进行修正。一是涂料从开口处喷涂料到球面上在经度方向有发散角,而经度方向不同纬度处传感器表面存在高度差;二是喷斑覆盖开口处的涂料质量分布不均匀。
选择某一尺寸的平行形状的开口进行喷涂实验,喷涂后球形传感器上的涂层进行测量得到厚度分布T(x)(图6),该厚度分布可以等效为通过挡板的涂料密度分布ρ(x),则有y⋅dx⋅ρ(x)=c⋅2πR⋅dx,从而得到对挡板的形状修正曲线。
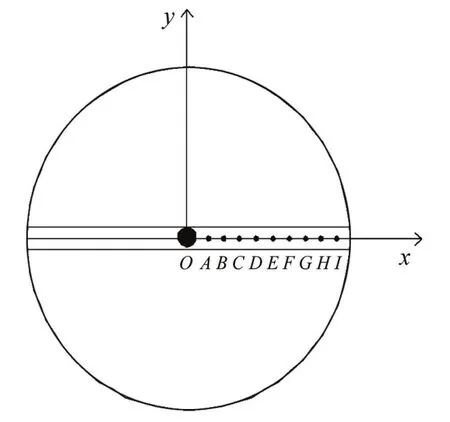
图6 传感器涂层厚度测量选点图
2 实验结果
2.1 直线开口喷涂实验
使用间距为15 mm的矩形开口喷涂10个来回,得到的工艺件涂层厚度的数据如表1所列。
由表1可以看出涂层厚度最大与最小值之间差5μm,涂层厚度以赤道为中心两边接近对称,赤道处厚度最大,向两极厚度递减。涂层厚度出现赤道处厚,两极薄,主要是由喷枪出料具有发散角造成的。
2.2 修正开口形状后的喷涂实验结果
2.2.1 挡板1实验
对开口的形状进行修正。挡板1的开口与传感器对应的部分采用直线段连接,形状和规格如图7所示。喷涂18次得到的涂层厚度分布如图8所示,喷涂18次得到的涂层厚度数据如表2所列。
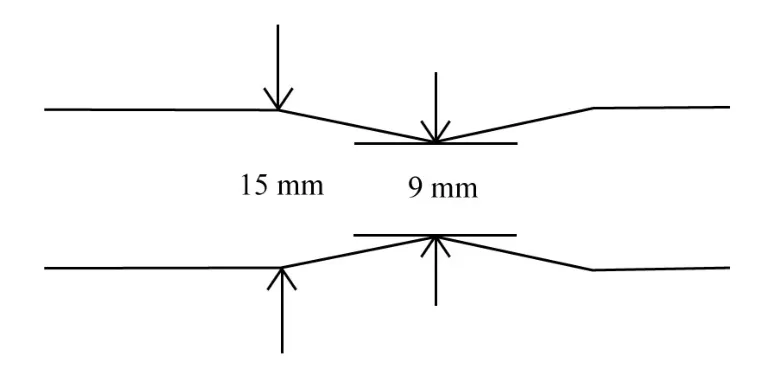
图7 挡板1开口形状及规格

图8 喷涂18次得到的涂层厚度分布图
从此次喷涂结果看,涂层最大与最小厚度差为4μm,涂层的均匀性良好,赤道处略薄,这是由于开口中心处收缩得略窄造成的。涂层最小厚度为27μm,整个传感器表面涂层厚度平均值为29μm,接近传感器涂层厚度30μm的要求,考虑到涂层固化厚度具有10%左右的收缩,通过适当增加喷涂次数使厚度值达到要求。

表1 工艺件涂层厚度测量结果(单位:μm)

表2 喷涂18次得到的涂层厚度测量结果(单位:μm)
2.2.2 挡板2实验
图9为挡板2开口形状及规格,图10和表3是利用挡板上开口(挡板2),喷涂24次得到的涂层厚度分布图和涂层厚度数据表。
从表3喷涂结果看,涂层最大与最小厚度差为9μm,涂层的均匀性良好,赤道处略薄,这是由于开口中心处收缩得略窄造成的。涂层最大厚度为48μm,在固化之后涂层厚度略大于电场仪涂层厚度的最大值40μm,通过适当减少喷涂次数使厚度值达到要求。
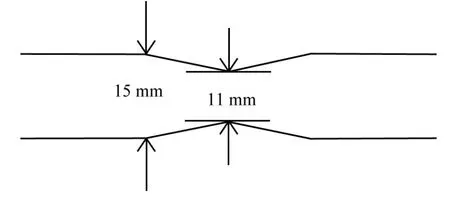
图9 挡板2开口形状及规格

图10 喷涂24次得到的涂层厚度分布图
3 对方案的说明
3.1 关于工艺的稳定性
本方案球形传感器纬度方向上涂层的均匀性由球形传感器的适当转速联合多次喷涂实现,经度方向上的均匀性由控制挡板上开口的形状实现。于是在整个喷涂过程中,涂料的浓度、喷枪的高度、出料的速率(即输送气压)、挡板与喷枪之间的距离、挡板与传感器之间的距离等都是可以固化的量,改变挡板上开口的形状可以保证球形传感器喷涂的均匀性。喷涂次数由实验确定。

表3 喷涂24次得到的涂层厚度测量结果(单位:μm)
3.2 半球喷涂方案
传感器的涂层需要在120℃的温度下固化24 h,为保证传感器内置电路不受损害,可进行半球分别涂覆,固化后安装内置电路,之后将两半球合并。与此对应的喷涂方案为:半球分别喷涂时利用图11中开口的LEACGN段和BFMOHD段,两半球合并后利用开口的ABDC段进行喷涂。这样,两次喷涂的合成效果与全球喷涂利用全部开口LEABFMOHDCGN段效果相同。

图11 半球喷涂方案挡板开口形状图
4 结论
为了实现电场仪器球形传感器涂层的均匀性,提出了一种新的电场仪球形传感器喷涂方案,通过机械臂带动喷枪运动,在喷枪和球形传感器之间增加带开口的挡板,通过理论计算得到开口的形状曲线。从初步的实验结果来看,能够实现电场仪球形传感器涂层均匀性的要求。另外,本方案能够使工艺稳定,相关的参数可以固化。通过喷涂厚度的测量结果,调整挡板上开口的形状能够精细控制电场仪球形传感器表面涂层的均匀性。对于本方案而言,由于取的是束斑的中央部分,束缚外围的干燥部分不会喷涂到传感器上,因此不会在传感器表面形成沉积颗粒,提高了涂层的质量。
[1]Bertheliera J J,Godefroya M,Leblanca F,et al.ICE,the elec⁃tric field experiment on DEMETER[J].Planetary and Space Science,2006,54(5):456–471.
[2]Williams,Donald J,Barfield,et al.,Initial Explorer 45 Sub⁃storm Observation and Electric Field Consideration[J].Jour⁃nalofGeopgysicalResearch,79(4):554-564
[3]Bame S J,Asbridge I R,Felthauser H E,et al.ISEE-1 and IS⁃EE-2,fastplasmaexperimentandtheisee-1solarwindexper⁃iment,geoscienceelectronics[J].IEEETransactions,1978,16(3):216-220
[4]Harvey P,Mozer F S,Pankow D.The electric field instrument on the POLAR satellite[J].Space Science Review,1995,71(1-4):583-596
[5]Eriksson A I,André M,Klecker B,et al.Electric field mea⁃surements on Cluster:comparing the double-probe and elec⁃tron drift techniques[C]//Annales Geophysicae.2006,24(1):275-289.
[6]Marklund G T,Blomberg L G,Lindqvist P A,et al.The double probe electric field experiment on FREJA,experiment de⁃scription and first results[J].Space Science Reviews,1994,70:483-508.
[7]Wild J A,M Hapgood A.Five plus four equals nine:combin⁃ing the THEMIS and Cluster missions[C]//Int.Conf Sub⁃storms,2006:337-342.
[8]满峰.星载电场仪关键技术研究[D].西安:中国科学院西安光学精密机械研究所,2009.
猜你喜欢
排灌机械工程学报(2022年12期)2023-01-02
中学生天地(A版)(2021年9期)2021-10-25
能源工程(2021年1期)2021-04-13
科技视界(2019年10期)2019-09-02
中国有色冶金(2018年1期)2018-02-01
中国自行车(2017年1期)2017-04-16
发明与创新·大科技(2017年1期)2017-01-14
科技创新导报(2016年9期)2016-05-14
汽车维护与修理(2015年1期)2015-02-28
初中生世界·七年级(2014年2期)2014-03-24
