
下肢智能康复机器人控制系统设计与实现
2014-12-03 05:05:08顾绮芳无锡城市职业技术学院电子信息工程系江苏无锡214153
长江大学学报(自科版) 2014年34期
顾绮芳 (无锡城市职业技术学院电子信息工程系,江苏 无锡214153)
传统的下肢康复训练机器人控制系统存在着训练功能单一、保护患者的安全措施不够完善、不能保存患者信息并与上位医疗管理系统进行共享、训练过程枯燥乏味等缺点。为此,笔者对下肢智能康复机器人控制系统(简称系统)进行了设计与开发,设计一套融合现代先进技术且成本相对低廉的智能康复训练机器人并加以推广,让更多的患者能够通过康复训练机器人的帮助改善康复过程,重建运动机能,具有重要的现实意义。
1 系统总体架构
系统设计要求主要包括如下几方面:通过上位ARM控制器与下位驱动器通信,实现对直流电机的控制;选用的驱动器可以实现对直流电机的恒电流、恒速度和位置控制;系统工作模式包括主动训练模式(由训练踏车以可调节的恒速度带动患者运动)、被动训练模式(患者做踏车运动,电机为患者提供恒定阻力矩)和力量测试模式(踏车在患者可选的位置锁定,测定患者蹬力)。根据设计要求,确定系统主要组成部件如下:基于ARM9内核的上位触控平台;24V-200W直流伺服电机(带有光电编码器);直流电机驱动器(可以实现对电机的恒流、恒速和位置控制);转轴扭矩传感器(输入24V,输出0~5V),量程为30Nm;电压放大器(输入24V,输出0~5V);RS232串口通信模块;89S52下位单片机最小系统(负责采集转轴扭矩信号);电压转换模块(输入7~40V,稳定输出12V和5V电压)。系统总体架构图如图1所示。用户通过触摸屏来向基于ARM内核的处理机(简称ARM处理机)来发送控制命令,ARM处理机将控制信息转化为驱动器能够识别的指令,通过RS232串行接口发送给驱动器。驱动器接收到指令后,根据指令控制直流伺服电动机运转,使直流伺服电动机实现恒流或者恒速运转。在驱动器对直流电动机控制的过程中,直流电机尾部的光电编码器不断采集直流电机的转轴位置,并反馈给驱动器,驱动器借以得到直流电机的转轴位置和转轴速度,同时对供电电流或者电压进行相关调节来实现控制要求[1-2]。直流电机在运转过程中,AD转换接口不断通过转轴扭矩传感器采集转轴上的力矩值,在必要时反馈给ARM处理机并显示在触摸屏上。
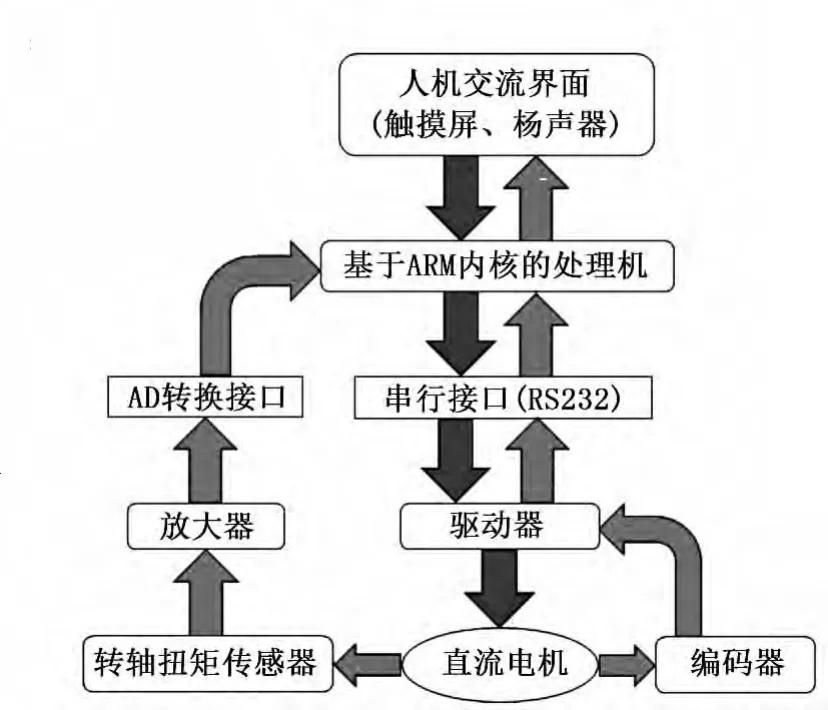
图1 系统总体架构图
2 系统硬件设计
系统硬件连接图如图2所示。220V转24V的稳压电源输出3路24V电源,分别为低压电源转换模块、电压放大模块、直流伺服电机驱动器供电。低压电源转换模块将24V电压转换为5V和12V的稳定电压,偏差不超过±3%,5V电源为89S52单片机最小系统供电,12V电源为ARM触摸屏控制平台供电。ARM触摸屏控制平台通过2个RS232串行通信模块分别直流伺服电机驱动器和89S52单片机最小系统通信。89S52单片机最小系统通过电源线、控制总线、数据总线与ADC0809模数转换模块连接。由于转轴扭矩传感器的输出电压范围为0~5V,ADC0809模数转换模块无法直接采集,需要由电压放大模块将转轴扭矩传感器的输出电压放大后再提供给ADC0809模数转换模块采集。转轴扭矩传感器通过联轴器连接在直流伺服电机输出轴和传动轴之间。直流伺服电机驱动器通过电源线与直流伺服电机相连,同时为直流伺服电机尾部的光电编码器提供+5V电源。光电编码器通过A、B两路通道将直流伺服电机转轴的位置信息反馈给直流伺服电机驱动器。
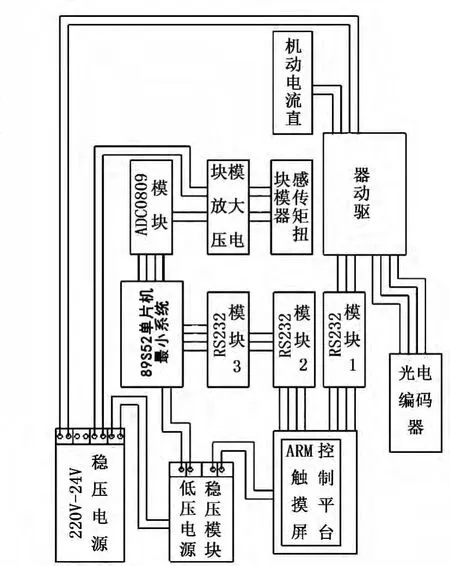
图2 系统硬件连接图
3 人机操作界面设计
人机操作界面(简称界面)设计的基本要求如下:与用户交流界面友好,易于看懂和操作;界面尽量美观,达到商品化的要求;实现ARM控制平台的WINCE启动后控制软件自动运行。
3.1 操作系统的选择
该硬件平台采用基于ARM内核的处理器,目前适用于该类处理器的主流操作系统有Windows CE系统和Linux系统,由于Windows系统的开发环境比较自由,因而选择Windows CE系统来作为该控制平台的操作系统[3]。
3.2 界面美化处理
界面设计运用的软件为Visual Studio 2005,使用的语言为VC++。界面使用桌面图标的样式,具有二级页面,包括桌面和功能界面,必要时加入附属功能界面。利用外加的“CeButtonST按钮”类进行界面美化处理,即通过“CeButtonST按钮”类所包含的多个函数,根据需要修改图标,为按钮添加各种丰富的样式,实现类似桌面图标风格的效果[4-5]
3.3 操作流程
1)用户注册和登录 如果患者第一次使用该系统,那么需要进行注册,单击进入注册界面(见图3)。首先输入账号、密码和确认密码,若信息填写无误,则出现注册成功的界面。患者注册成功后即返回登录界面,将注册时的信息填写进去,错误时会有信息提示,信息填写无误时则出现成功信息。最后返回主界面,在桌面正下方会出现患者登录的账号信息。
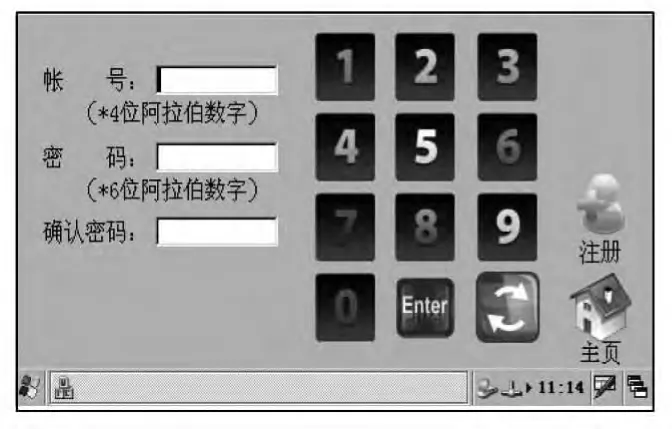
图3 注册界面
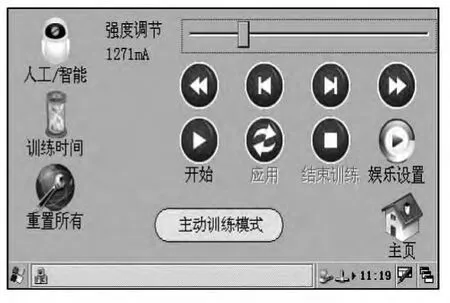
图4 主动训练模式界面
2)训练模式选择 成功登录后,患者可以单击主动训练模式图标,此时会出现相应界面(见图4)。主动训练模式适用于具有部分运动机能的患者,因而可以选择训练时间,也可以自定义时间,单击之后即返回训练界面。此外,可以拖动界面的滑块来调节训练的强度值,也可以通过单击滑块下方的4个按钮来实现强度的微调。选择好上述内容后即可进行主动式训练。在训练过程中,也可以重新调节强度,只要设置后单击“应用”按钮即可有效。训练结束后,系统会自动停止,并提示训练时间结束。如果训练中想暂停,可以单击“暂停”键。如果想提前结束可以单击“结束训练”按钮键。被动训练模式适用于丧失肢体运动机能的患者,其界面和使用方法与主动训练模式类似,其主要区别是系统中的直流伺服电机会以患者选择的速度带动下肢进行踏车运动,从而帮助患者恢复运动机能。
3)娱乐功能的使用 如果患者在训练过程忠感觉枯燥的话,也可以选择训练界面的“娱乐”键,再单击“打开”按钮进行音乐选择。在播放音乐时,可以选择“后台运行”键,返回到训练界面。当患者结束训练时,音乐会随机自动关闭。
4)力量测试模式的运用 在桌面上单击“力量测量”图标,即会出现相应界面(见图5)。测力模式适用于下肢具有一定运动机能的患者,其可以通过运用测力模式测试下肢蹬力。在该模式下,患者单击“手动轴位”按钮,手动调节测力时转轴的位置(此时一定要先按下“松开”键,使转轴处于自由状态),调节好后按下“抱紧”键即可开始测试。此外,可以选择“自动轴位”,通过“上转”、“下转”按钮来调节转轴的位置,然后点击“开始测试”键进行下肢力量测试。测试结束后,可以单击“结束测试”键并保存测试结果。
5)查看训练历史界面 在登录情况下,在桌面上单击“训练历史”图标,即可出现训练历史查看主界面,单击图标后会出现相应模式的训练历史纪录,包含患者的训练时间、强度和时长。在主动训练模式和被动训练模式下,系统会自动为患者存储训练历史。在力量测试模式下,单击“保存结果”按键后会保存测试结果。
6)注销界面 如果患者训练后想关闭账号信息,可以单击桌面的“注销”按钮,这样便于其他患者使用该系统。

图5 力量测试模式界面
4 结语
根据下肢康复机器人控制系统的设计要求,具体阐述了该系统硬件和人机操作界面的设计和搭建,并详细介绍了人机操作界面的操作流程(包括用户注册和登录、训练模式选择、娱乐功能的使用、力量测试模式的运用、查看训练历史及界面注销)。下肢康复机器人控制系统可以满足不同康复阶段患者的需求,从而提高下肢运动缺陷患者的康复训练水平。
[1] 谢欲晓,白伟,张羽 .下肢康复训练机器人的研究现状与趋势 [J].中国医疗器械信息,2010,16(2):5-8,56.
[2] 张付祥,付宜利,王树国 .康复机器人研究进展 [J].河北工业科技,2005,22(2):100-105.
[3] 杜志江,孙传杰,陈艳宁 .康复机器人研究现状 [J].中国康复医学杂志,2003,18(5):293-294.
[4] 王广志,任宇鹏,季林红,等 .机器人辅助运动神经康复的研究现状 [J].机器人技术与应用,2004,16(4):9-14.
[5] 丁敏,李建民,吴庆文,等 .下肢步态康复机器人:研究进展及临床应用 [J].中国组织工程研究与临床康复,2010,14(5):6604-6607.
猜你喜欢
上海大中型电机(2021年1期)2021-06-09 09:12:06
微特电机(2020年11期)2020-12-30 19:42:32
电脑爱好者(2020年6期)2020-05-26 09:27:33
山东冶金(2019年2期)2019-05-11 09:12:24
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
电脑爱好者(2016年23期)2017-01-05 20:39:51
光学精密工程(2016年5期)2016-11-07 09:06:04
工业设计(2016年6期)2016-04-17 06:42:53
上海电机学院学报(2015年3期)2015-02-28 14:29:52
