
智能停车场车位检测系统设计与实现
2014-12-03 05:05:06李坤陈庆胜仲文祥无锡机电高等职业技术学校自动化工程系江苏无锡214028
长江大学学报(自科版) 2014年34期
李坤,陈庆胜,仲文祥 (无锡机电高等职业技术学校自动化工程系,江苏 无锡214028)
目前,传统停车厂管理中存在功能单一、实时性差、效率低下等问题。为解决上述问题,笔者利用Zigbee无线网络免牌照频段、动态组网、自组多跳的特点,设计了智能停车场车位检测系统,以期为停车场高效管理提供新的途径。
1 系统方案设计
车位检测系统通过检测对应车位的车辆状态,经过系统Zigbee网络认证后,与周边检测节点构成Zigbee自组多跳网络,最终将车位数据转发到与中央控制系统连接的Zigbee中心节点。车位检测功能是通过设置在车位中央的一个红外障碍检测模块来实现的。MCU(调制解调器)调制出38kz脉冲并送入红外发射器遇到障碍物(车辆底盘),漫反射返回到红外接收器,产生一个下降沿脉冲,该脉冲可以被MCU检测,从而了解检测车位的占用信息。
该系统采用簇树网络和层次化路由协议[1]。具体做法是将网络中所有的节点分成若干个簇,每个簇相当于一个较为固定的自组织网络,由一个路由器负责协调网络、数据中继和转发。Zigbee传输范围一般介于10~100m,为保证网络安全性,每个终端节点与路由器距离控制在50m以内,并且通过多路由交叉覆盖的方法保证每个中断节点都有2个路由器来提供数据转发功能,每个终端节点将自身的采集到的状态信息通过自组多跳的网络上报给协调器,然后由协调器上报给监控PC机,最终实现系统的数据采集和汇总(见图1)。
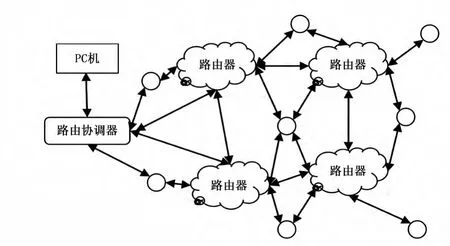
图1 系统组网方案图
2 系统硬件设计
车位检测系统通过包括红外障碍检测模块、Zigbee无线传输模块和电源管理模块。
2.1 红外障碍检测模块
综合考虑成本、功耗、可靠性、布置便利性等多方面因素,选择调制红外方案作为车位检测手段。调制红外的车辆检测功能是通过设置在车位中央的一个红外障碍检测模块来实现的,即通过MCU调制出38kz脉冲并送入红外发射器,当遇到障碍物(车辆底盘)后漫反射返回到红外接收器,产生一个下降沿脉冲,该脉冲可以被MCU检测,从而了解所检测车位的占用信息。
2.2 Zigbee无线传输模块
Zigbee无线传输模块中CC2430集成度很高,只需加上外部晶振和复位电路即可工作,射频部分需要设计成50Ω的阻抗天线板载电路即可(见图2)。
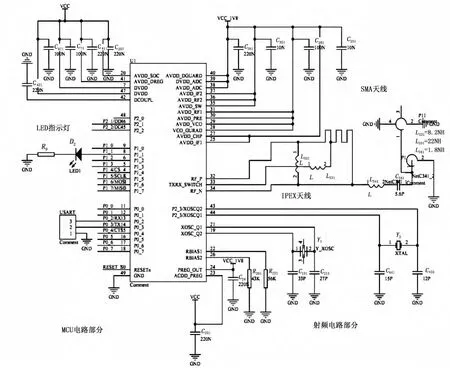
图2 Zigbee无线传输模块设计电路设计图
复位电路采用上电复位设计,加入0.1μF的电容进行消除按键抖动。为了便于程序的调试开发,将设备中JTAG(Joint Test Action Group,联合测试工作组)管脚通过标准双排排针引出。

图3 电源管理模块电路设计图
2.3 电源管理模块
考虑到系统由3个不同功能的网络功能组件(Zigbee网络协调器、Zigbee路由器、Zigbee终端车位检测节点)构成,其中Zigbee网络协调器位于网络的核心,负责整个网络的地址分配的信息,而Zigbee终端车位检测节点需要考虑到布网和维护便捷性,因而采用锂电池+太阳能供电的方式。选择MIC5245芯片产生3.3V电源为系统供电,供电模块输入电压为1.5~15V,采用升压降压式开关电源来增加设备的电压适用范围和提高电源利用效率(开关电源电源利用率达95%)[2]。电源管理模块电路设计图如图3所示。此外,为了精确测量电源电量变化,将电源电压经过串联分压送入MCU的AD测量管脚,结合MCU内部的基准1.2V基准电压,由此达到精确测量电源电量的目的。
3 系统软件设计
Zigbee车位检测嵌入式软件是运行在Zigbee射频芯片CC2430上的下位机软件,可以分为Zigbee网络协调器程序、Zigbee路由器程序和Zigbee终端检测节点程序3部分。
3.1 Zigbee网络协调器程序
Zigbee网络协调器负责整个网络的组织协调工作,自身使用固定的网络地址0x0000,非常适合作为系统的数据汇集点,其通过使用RS232串口与中央控制系统连接,将汇集过来的数据上报给中央控制系统,并最终由中央控制系统将数据存储进内置或通用的数据库服务器[3]。网络协调器程序运行流程图如图4所示。
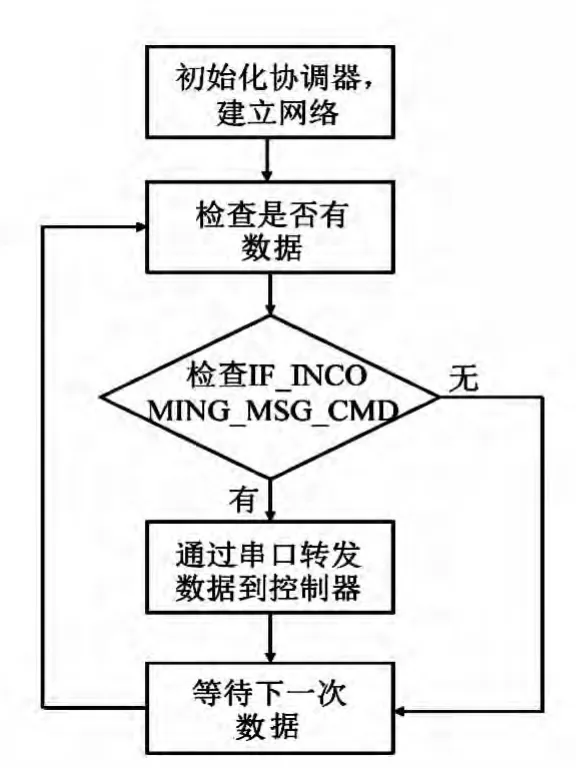
图4 Zigbee网络协调器程序运行流程图
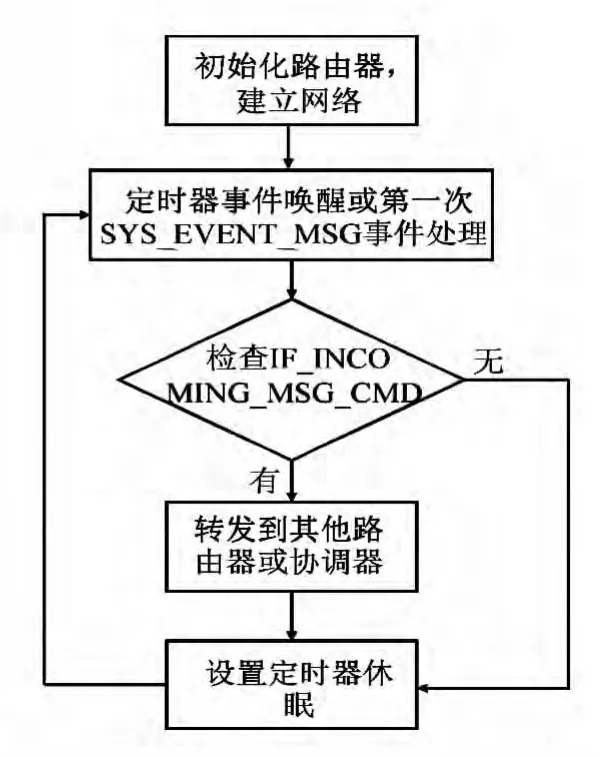
图5 Zigbee路由器程序运行 流程图
3.2 Zigbee路由器程序
在Zigbee网络中,路由器节点可以将收到的数据报文进行二次转发,使得终端采集节点不受数据汇集节点位置限制,可自由安排在所需位置,若距离较远时,只需在中间添加Zigbee路由节点进行数据中继和转发即可。Zigbee路由器程序运行流程图如图5所示。
3.3 Zigbee终端车位检测节点程序
由于终端车位检测节点能源非常有限,因而在程序运行中采取以下措施来节约能源:①在搜索到网络后将网络参数及时的保存到非易失性存储器。在下次连接网络时,程序优先读取上次保存的网络参数,大大减少网络搜索时间;②每次检测完成或者数据发送完成后关闭无线收发功能,将所有的IO管脚设置成三态浮空,红外发射和接收单元的MOS管在上拉电阻的作用下自动关闭,接入节电模式;③MCU在完成节电参数设置自身的休眠时钟进入低功耗休眠模式,等待下次时钟溢出唤醒事件[4]。Zigbee终端车位检测节点程序运行流程图如图6所示。
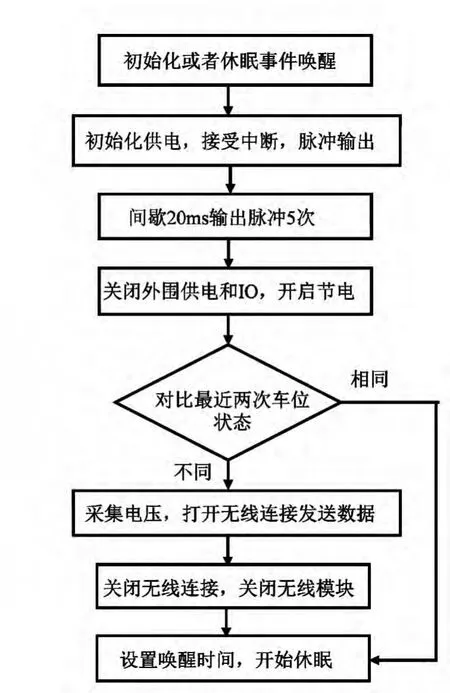
图6 Zigbee终端车位检测节点程序运行流程图
4 系统测试
通过使用不同的遮挡材料和不同的测试高度(不同车辆的底盘高度不同,常规家用小型车辆的车辆底盘高度为20~40cm,而工程类车辆底盘高度为30~70cm)进行测试,结果如表1所示。由表1可知,汽车底盘遮蔽物与监测点的距离在50cm以内的检测准确率接近于100%,检测距离超过50cm的检测精度稍微有所下降,由于停车场一般为常规家用小型车辆所用,因而通过测试表明车位检测系统的检测精度是安全可靠的。
5 结语
根据停车场的特点和实际需求,将Zigbee技术融入智能停车场车位检测系统,将监测点网络化,通过实时监测来随时反映各车位的占用情况,从而为停车场高效管理提供了良好途径。但是,该系统还存在抗干扰(静电干扰、射频干扰、噪声干扰)不足的问题,这需要今后进一步加以改进,使其结构和功能更加完善。
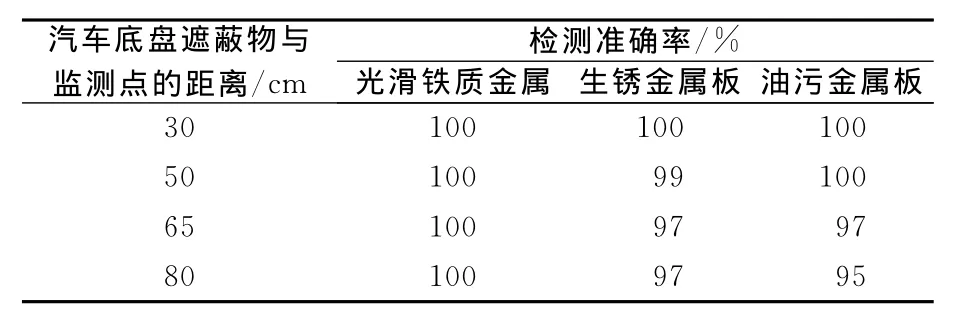
表1 Zigbee车位检测系统可靠性测试数据表
[1] 高守玮,吴灿阳.Zigbee技术实践教程——基于CC2430/31的无线传感网络解决方案 [M].北京:北京航空航天大学出版社,2009.
[2] 瞿雷,刘盛德,胡咸斌.Zigbee技术及应用 [M].北京:北京航空航天大学出版社,2007.
[3] 李文仲,段朝玉.Zigbee2006无线网络与无线定位实战 [M].北京:北京航空航天大学出版社,2008.
[4] 程晓旭,耿鲁静,张海,等.C语言算法速查手册 [M].北京:人民邮电出版社,2009.
[5] 成洁,卢紫毅.Linux窗口程序设计:Qt4精彩实例分析 [M].北京:清华大学出版社,2008.
猜你喜欢
科教新报(2022年24期)2022-07-08 02:54:21
汽车画刊(2020年5期)2020-10-20 05:37:35
祝您健康·文摘版(2020年3期)2020-04-09 04:47:27
法大研究生(2020年2期)2020-01-19 01:43:04
现代家长(2018年11期)2018-01-05 11:22:22
中国防伪报道(2015年4期)2015-12-27 00:52:35
黑龙江省政法管理干部学院学报(2015年4期)2015-03-26 20:34:09
法制与经济·下旬刊(2014年8期)2014-05-30 15:57:11
发明与创新(2013年34期)2013-03-11 15:55:32
计算机应用文摘(2010年16期)2010-04-29 00:44:03
