
新型游梁动平衡智能调节装置方案研究
2014-12-02 01:39:40易文君周思柱李宁曾豪勇秦伦长江大学机械工程学院湖北荆州434023
机械工程师 2014年8期
易文君,周思柱,李宁,曾豪勇,秦伦(长江大学 机械工程学院,湖北 荆州 434023)
0 引言
抽油机是将石油从地下开采到地上的采油设备,它的产生和使用已有百年历史。其中应用最早、最普及的是游梁式抽油机,在游梁式抽油机中,应用最广泛的是常规型游梁式抽油机,其平衡方式属于机械平衡中的曲柄平衡。
常规型游梁式抽油机具有结构简单、适用范围广、工作可靠、维修及保养成本低、技术成熟等优点。但由于其本身的结构特征,决定了曲柄净转矩脉动大,存在负转矩、载荷率低、工作效率低和能耗大等缺点[1]。目前抽油机的节能措施主要集中在以下3 个方面:一是将常规型游梁式抽油机分批进行节能改造,改造成前置式抽油机、下偏杠铃抽油机等;二是给常规型游梁式抽油机加装节能辅助平衡装置,实施节能改造;三是在抽油机电控柜加装电容器,对电动机无功功率进行补偿[2]。本文的几种节能方案都属于第二种节能方法。这种方法相比第一种方法的优势在于,基本无需改变抽油机的自身结构,改造费用低,节能效果好。
1 游梁抽油机节能原理
常规型游梁式抽油机如图1 所示。
游梁式抽油机工作效率不高的主要原因是其载荷特性与所用普通三相异步电动机的工作特性不匹配,普通异步电动机适宜拖动均匀载荷,而载荷转矩是一个随曲柄转角周期性剧烈变化的曲线,且随井况和抽汲参数的不同而变化,是一组形态各异、数值不同的曲线族,这就要求平衡装置作用在曲柄轴上的平衡转矩曲线是一组与载荷转矩曲线镜像相似并且形态、数值可调整的曲线族,从而使得曲柄轴净扭矩曲线趋于直线形态[3],进而达到节省电能的目的。因此,改变或调整载荷转矩曲线和平衡转矩曲线的形状及相位差,减小净转矩曲线的波动变化幅度和上下峰值,消除负转矩,可达到节能的目的。围绕这一目标,主要途径是通过改变抽油机的平衡方式实现节能。

图1 常规型游梁式抽油机
机械平衡是抽油机的平衡方式之一,根据平衡重装设的位置,机械平衡又分为3 种:游梁平衡、曲柄平衡和复合平衡。改变平衡重量或平衡重的位置可以调节平衡的效果。只要平衡重配置合理,既可以消除下冲程时电机作负功的现象,又可以减少上冲程时电机的能量消耗,使上、下冲程中电机做功接近相等[4]。
本文叙述的游梁辅助平衡也是一种重要的且实施性强的机械调平衡方法。
2 游梁辅助平衡方案
2.1 游梁辅助平衡方案一
安装在游梁式抽油机游梁内部的辅助平衡装置结构如图2 所示。
伺服电机旋转,经过联轴器后,转化为丝杠的旋转运动,丝杠外螺纹与游码上环形铜套的内螺纹配合,从而将旋转运动转化为游码的直线运动。游码就相当于平衡重,它的移动实现了平衡力矩的变化,以满足不同工况下抽油机调平衡的要求。电机的正反转,可以使游码往两个方向移动。当到达指定位置时,电机停止运转。
方案一的优缺点:
优点:1)采用伺服电机,可控制转速及转矩,减少了减速装置的设置,且调平衡快速精确;2)采用滑动丝杠螺母传动,可实现正反向自锁。
缺点:1)对原抽油机的改动和破坏较大;2)把平衡部件置于游梁内部,虽然避免了平衡部件生锈和腐蚀,而且节省了空间,但当伺服电机、丝杠、游码等零部件需要更换或维修时,既便于装卸,又不利于实时监测平衡装置内部运转状况;3)平衡转矩小,平衡重不能调节重量,调平衡范围较窄。
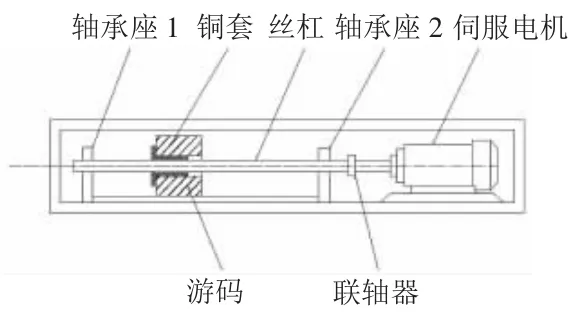
图2 游梁辅助平衡方案一示意图
2.2 游梁辅助平衡方案二
在游梁尾部加装可移动的平衡块,平衡装置结构如图3 所示。
基础平衡重位于平衡装置尾部且重量可调。游码上和外壳上开有燕尾槽,使得游码随丝杠做直线运动而不转动。调平衡时,伺服电机运转带动丝杠转动,游码沿着燕尾导轨做直线运动以实现平衡力臂与平衡力矩的变化,当游码运动到目标位置时,电机停止运转。
方案二的优缺点:
优点:1)与方案一的优点相同;2)平衡重加装在游梁尾部,且基础平衡块重量可调,比方案一的调平衡范围更大;3)对原常规型游梁式抽油机不造成破坏。
缺点:1)整个平衡装置暴露在空气中,对油田恶劣环境适应性较差,丝杠容易砂卡腐蚀,造成停机或其它故障;2)燕尾导轨滑动摩擦阻力大,不适宜经常调平衡。

图3 游梁辅助平衡方案二示意图
3 新型游梁抽油机动平衡智能调节装置
通过对以上方案的对比分析,在此基础上提出一种新的游梁抽油机动平衡智能调节方案(可称方案三)。该装置不仅克服了方案一和方案二的缺陷,且采用数字化控制柜控制伺服电机动作,进而实现摆杆摆角0°~90°变化,实现实时动态自动调平衡。
如图4 所示,该游梁辅助平衡装置分为控制机构和执行机构。执行机构于地面组装完成后固定在游梁尾部。在抽油机驴头上安装有传感器,传感器和电参数采集模块共同构成数据采集模块。数据采集模块通过信号线与数字化控制柜连接。当抽油机调平衡时,数字化控制柜接收数据采集模块采集的数据,通过软件计算出此时抽油机的平衡度,并实时显示平衡度,再设定一个最佳平衡度,控制器通过计算,输入运动指令代码,输出控制信号给伺服电机,驱动伺服电机动作。伺服电机运转带动丝杠转动,同时游码直线运动,游码两侧的承力轴承将丝杠垂直方向上的分力转移到承力导轨上,波纹管则随游码的直线运动弹性伸缩,保护丝杠。游码的直线运动带动连杆运动、摆杆摆动,使得平衡力臂和平衡力矩也随之改变,当到达目标平衡位置时,电机停止动作。由于在抽汲过程中,油藏状况不断改变,所以需要设定适当的调整周期经常调整平衡。控制过程见图5。
与方案一和方案二相比,方案三具有以下显著优点:1)采用控制系统控制伺服电机动作,无需手动调平衡,可根据监测信息自动调节抽油机平衡,智能化程度高。

图4 辅助调节装置
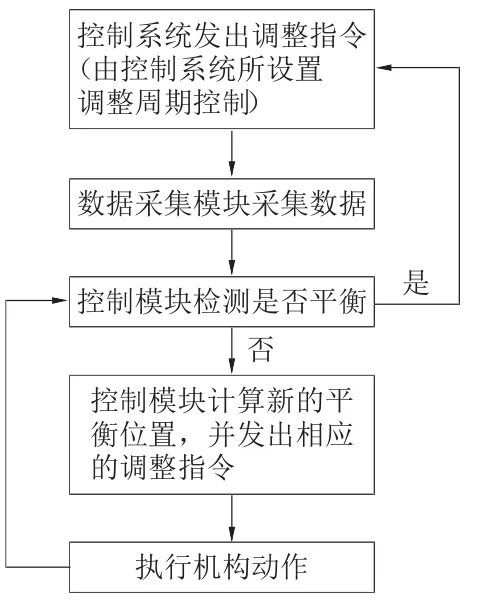
图5 游梁抽油机动平衡智能调节装置自动调平衡工作原理图
2)整个平衡装置通过方形法兰安装在游梁尾部,不改变原抽油机的结构。
3)通过改变摆杆摆角从0°~90°的变化及改变平衡重的重量来调节抽油机的平衡,与前两个方案相比,大大拓宽了调平衡范围,平衡效果更好。
4)采用承力轴承与承力导轨滚动配合,与普通的燕尾导轨相比摩擦力大大减小。
5)丝杠采用塑料波纹管和保护罩双重密封保护,有利于防砂防尘,增强了该装置对油田恶劣环境的适应性,提高了整个平衡装置的使用寿命。
4 结论
1)游梁辅助平衡可有效地解决常规游梁式抽油机能耗大、调平衡难度大、时间长及工作效率低等技术难题,平衡装置的设计应综合考虑调平衡范围、环境适应性、结构紧凑性、安装便捷性和可靠性等因素。
2)该新型游梁抽油机动平衡智能调节装置作为一项新方案,其制造加工的技术规范、控制系统的设计软件、平衡效果的现场测试、安装与维护管理制度等还需完善,以进一步提高该装置应用的规范性、适用性和可靠性。
[1]苏德胜,刘先刚,吕卫祥,等.游梁式抽油机节能机理综述[J].石油机械,2001,29(5):49-53.
[2]刘长胜.抽油机节能现状与降耗措施[J].宁波节能,2012(5):44-46.
[3]倪国军,高长乐,王志坚.常规游梁式抽油机节能改造[J].新疆石油天然气,2005,1(1):83-86.
[4]李继志,陈荣振.石油钻采机械概论[M].东营:中国石油大学出版社,2006.
猜你喜欢
机械制造(2021年9期)2021-10-12 12:28:08
机械管理开发(2021年5期)2021-06-29 08:57:00
石油石化节能(2021年1期)2021-01-23 02:06:42
制造技术与机床(2019年11期)2019-12-04 05:50:26
世界有色金属(2018年13期)2018-09-12 11:54:10
中国资源综合利用(2018年6期)2018-08-02 02:45:34
制造技术与机床(2017年11期)2017-12-18 06:46:49
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:25
实验技术与管理(2014年12期)2014-03-11 18:38:34
机械制造与自动化(2014年1期)2014-03-01 04:21:45
