深度模拟器的试验研究*
2014-12-02 06:06:44
舰船电子工程 2014年3期
(中国船舶重工集团公司第七一〇研究所 宜昌 443003)
1 引言
深度模拟器是水下航行器深度控制系统半实物仿真的重要设备。它由水下航行器主控机或本机仿真主控机控制运行,产生一定要求的压力输出,来模拟水下航行器在不同海洋深度航行时所承受的水压。该设备可为压力检测系统提供分析所需要的各种动态压力信号,所以配合航行器深度系统的有关模块,可在实验室条件下对水下航行器纵向深度控制系统的各项性能指标和参数进行测试[1~2]。
虽然经过多年研究,深度模拟器仍存在一些问题,比如动态响应频率低,无法准确跟踪预定的输入信号,自适应能力差等[3~4]。本课题组结合某水下航行体半实物仿真的需求开发了一种新型的,见图1深度模拟器。并对深度模拟器进行了性能试验验证[5~6]。
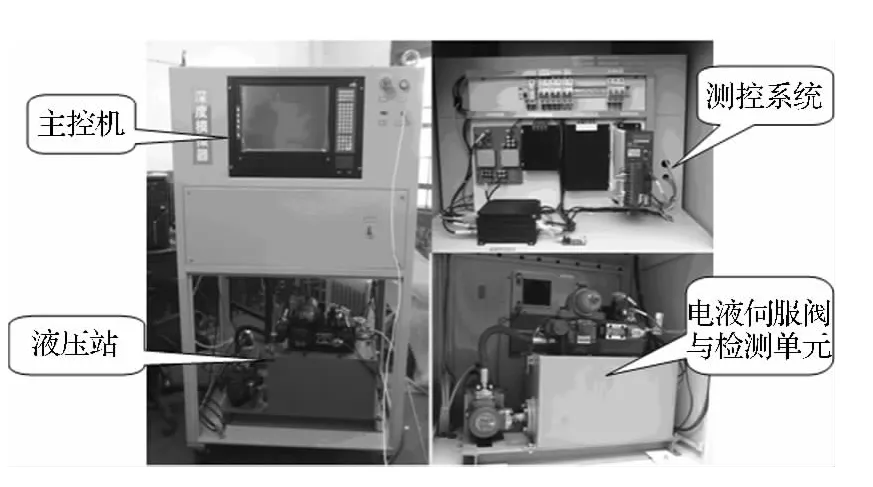
图1 深度模拟器
2 深度模拟器的组成与工作原理
深度模拟器是模拟水下航行器在不同水深条件所承受水压的压力输出系统。深度模拟器的主要组成有主控计算机(主控机),测控系统,液压站,电液伺服阀和检测单元等部分。如图2所示为深度模拟器系统总体组成框图。其工作原理是利用主控机发出给定的压力输入信号,通过测控系统同时分别控制液压站和电液伺服阀,电液伺服阀输出信号通过检测单元输出相应的信号,检测单元同时把输出的信号闭环反馈到测控系统[7~8]。

图2 深度模拟器系统总体组成框图
主控机是深度模拟器的上位机监控系统,主要完成信号输入输出、数据采集、信息显示等任务。测控系统是深度模拟器的下位机实时测控系统,主要对数据采集板卡及继电器板卡的实时控制,通过D/A 转换及信号放大,控制液压站及电液伺服阀。液压站为深度模拟器提供稳定的油源压力及所需要的流量[9~10]。通过控制电液伺服阀阀芯的开合实现控制测控单元腔内的压力,进而实现控制输出相对应的压力;同时测控单元把信号A/D 转换,把输出信号反馈到测控系统,修正输入的控制信号,从而构成一个高精度闭环液压控制系统,使深度模拟器按设定的方式工作[11]。
3 试验方法及结果
3.1 试验前准备工作
1)检查电源是否准备好;2)检查油箱液压油位是否在规定的范围之内,如果油源不足应添加液压油,液压油的型号为L-HM46 防锈性抗磨液压油;3)检查被测对象的传感器是否与深度模拟器的出油口接头连接可靠。
3.2 启动设备与程序
1)先确保所有开关都处于关闭状态后,接通主控机柜上总电源,机柜右上角上电指示灯亮起即已上电;2)打开主控机箱后盖,打开主控机电源;3)打开主控机面板盖,将主控机电源开关置于ON 的状态,启动主控机;4)在主控机箱后部,从右至左依次开启各电源开关(空调电源可根据需要开启),如图3所示;5)开启中央处理器机箱上的电源(WFTPD软件接收到数据表明中央处理器已启动);6)等待WFTPD软件接收到数据后,在主控机屏幕桌面点击深度模拟器软件,启动深度模拟程序;在仿真机软件左下角的信息提示栏里看到蓝色的“系统已准备好,可以开始仿真!”字样,说明系统正常启动。

图3 主控机打开后各种开关开启与关闭次序
3.3 深度模拟器的试验
深度模拟器试验的主要目的是检验深度模拟器是否可在模拟压力输出范围内可输出任意单一压力,或依据输入信号或设定波形输出连续的压力;根据仿真系统需要,可向仿真系统主控机传送压力或深度数据。深度模拟器有两种工作方式,一是静态方式,二是动态方式。在静态工作方式下,系统根据输入要求,输出恒定压力;在动态工作方式下,系统根据输入的波形信号,输出连续可变的压力。试验测试项目如表1所示。
4 深度模拟器试验结果分析
按照深度模拟器试验测试项目,选择信源类型为仿真,并在仿真模式下,输入基准深度5m,振幅1m,频率1Hz三个参数,信号类型选取正弦。测试结果见图4仿真正弦测试结果。
由图4仿真正弦测试结果可以看出,参数输入区显示:基准深度5m,振幅1m,频率1Hz,输入压力为4.239m,输出压力为4.142m,油源压力为6.953MPa。从图4测试的结果显示,输出信号跟随输入信号,略有滞后,但仍能满足模拟跟踪要求。
选择信源类型为仿真,信号类型选取定深,并输入基准深度20m。测试结果见图5仿真定深测试结果。
由图5仿真定深测试结果可以看出,参数输入区显示:输入深度为20m,参数显示区显示:输入压力为19.999m,输出压力为20.029m,油源压力为4.728MPa。从图5测试的结果显示,输出信号与输入信号模拟跟踪良好。
选择信源类型为模拟模式下,深度模拟仿真系统的参数输入区已经锁定,显示为灰色,只能通过模拟通道输入的信号进行控制。通过信号源产生所设定的定值或正弦等信号,并将此信号施加给深度模拟器。通过信号源输入基准深度150m 的正弦信号,测试结果见图6模拟定深测试结果。
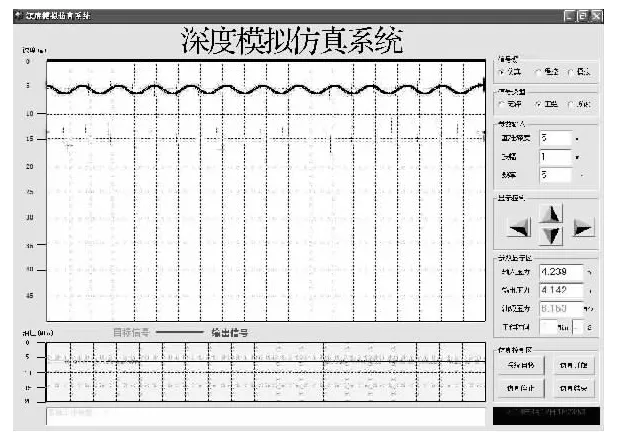
图4 仿真正弦测试结果

图5 仿真定深测试结果

图6 模拟正弦测试结果
由图6模拟正弦测试结果可以看出,参数显示区显示:输入压力为150.548m,输出压力为150.484m,油源压力为4.713MPa。从图6测试的结果显示,输出信号与输入信号模拟跟随良好。
通过上述各项内容的测试结果进一步验证了:1)在浅水区域,受电液伺服阀自然频响特性影响,深度模拟器对外界信号的跟踪能力略有滞后。2)随着深度模拟器模拟深度的增大,系统对信号的跟踪能力越好。
5 结语
研制出一种深度模拟器,并对其进行试验测试。通过上述各项内容的测试结果说明,在0m~500m 内,模拟器的静态精度可以达到≤0.2m;1Hz~20Hz范围内,动态精度可以达到:幅值|ΔA/A|≤30%,相位|ΔΦ|≤90°。测试试验的结果进一步确定研制的深度模拟器的效果满足使用要求,同时为下一步深度模拟器的优化设计及推广提供依据。
[1]高永宁,丁建龙.深度模拟器控制统设计与仿真[J].水雷战与舰船防护,2011,19(3).
[2]叶祥明.基于深度模拟器控制系统的仿真研究[J].水雷战与舰船防护,2002,17(4).
[3]万亚民,王孙安.一种高性能深度模拟器的研究[J].机床与液压,2003(4).
[4]万亚民,康文钰,沙琪.高性能深度模拟器控制系统研究[J].鱼雷技术,2002(9).
[5]Sinan O,Sertae K,Levent G.Robust Yaw Stability Controller Design for a Light Commercial Vehicle Using a Hardware in the Loop Steering Test Rig[C]//Proceedings of the 2007IEEE Intelligent Vehicles Symposium,2007:852-859.
[6]康凤举,张海军,高立娥.一种提高水压仿真器精度的新方法[J].系统仿真学报,1995(4).
[7]朱松柏,樊鹏.基于PC104平台的数据实时采样和动态显示[J].兵工自动化,2007(12).
[8]庞利平,罗凯,薛明.压力仿真器系统研制[J].机械与电子,2006(11).
[9]庞利平.水下航行器深度模拟系统研究及实现[D].西安:西北工业大学,2007.
[10]吴海彬.基于半物理仿真的海上平台沉浮运动研究[D].杭州:浙江大学,2002.
[11]罗凯,党建军,王育才.水下半物理仿真实验台背压模拟系统研制[C]//2010年中国造船工程学会优秀学术论文集,2011.
猜你喜欢
中学生数理化·高一版(2023年3期)2023-03-23 01:34:42
新高考·高三数学(2022年3期)2022-04-28 08:41:42
小哥白尼(趣味科学)(2021年6期)2021-11-02 05:23:48
故事作文·高年级(2021年4期)2021-05-06 03:20:04
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:18
电子测试(2018年22期)2018-12-19 05:12:58
中学生数理化·高一版(2018年6期)2018-07-09 06:00:56
山东工业技术(2016年15期)2016-12-01 05:31:42
太空探索(2016年12期)2016-07-18 11:13:43
电测与仪表(2015年16期)2015-04-12 00:44:26