
脊柱手法的力学研究概况
2014-11-29 00:49:04郭伟李艺韩磊田飞鹏闵亚青周卫赵平
颈腰痛杂志 2014年5期
郭伟,李艺,韩磊,田飞鹏,闵亚青,周卫,赵平
(1.空军总医院正骨科,100142;2.望京医院,北京 100102)
脊柱手法治疗脊柱损伤退变性疾病在我国已有数千年的历史。对其作用机制曾有着丰富的论述。时至今日,脊柱手法仍然是众多国家卫生防治指南中最常建议使用的治疗方法之一。目前手法主要有脊柱关节手法和椎旁软组织手法,其中脊柱关节手法主流手法分为关节调整或冲击手法和关节松动手法。关节调整手法(Manipulation)或冲击手法(Thrusting)[1]是利用作用于特殊解剖位置的长或短杠杆手段达到的关节手法。其特征是在一定的速率、振幅和方向下振动推力,既国际手法学术界惯常称谓的(High Velocity Low Amplitude)HVLA特征。这种手法经常伴有弹响声(空腔效应),比如传统中医的斜扳手法和美式整脊手法。关节松动术(Mobilization)是一种被动运动疗法,可以提升关节活动度,但不超过其解剖范围,一个非推力的关节运动通常不会超过关节的弹性界限,并不常见明显的关节弹响声。脊柱松动术是一个在关节活动范围内或在关节极度运动时更温和且更易于接受的可操作外力,比如冯氏手法和美式整脊的关节松动手法。
随着计算机仿真技术的发展,脊柱手法的模拟力学检测及脊柱力学模型仿真技术越来越趋于成熟,并得到了很大应用和发展。很多研究者运用力传感测量技术、光学定位捕捉技术,通过腰椎CT建立腰椎多体动力学模型,通过力学测量系统测量腰部手法操作的力学、运动学变化过程等,为揭示手法治疗脊柱损伤性疾病的机理,分析脊柱手法技术操作特点及影响因素提供了科学量化的方法,并对临床治疗提供了宝贵的基础研究数据,本文总结了国内外关于脊柱手法的力学机制研究和计算机仿真的研究进展,综述如下。
1 脊柱手法活体力学研究
1.1关节突关节压力的测量
以往相关学者研究,测量关节突关节面压力的方法很多。分为直接测量法和间接测量法。早期多以间接测量法为主。
1.1.1间接测量法 通过关节突关节的受力情况靠测量有关数据来推算。没有破坏关节突关节的完整性是间接法的优点,但其结果的可靠程度有待商榷。
1.1.2直接测量法 常见如压力传感器法。近年来随着相关技术的高速发展,压敏片[2]和其它测量方法相比,方法相对简单,能同时获得较完善的相关信息,能反映出应力分布的整体趋势,这是其他压力传感器法所无法比拟的。
1.1.3有限元分析法 通过脊柱三维数学模型的建立来模拟承载的实际情况和关节突关节的运动(具体总结见5)。Triano等[3]作用时间在200-300 ms情况下,使用反动力模型估算旋转手法的旋扳力是111N和123N。
1.2软组织按摩手法的力学研究
很多研究者做了有益的尝试,邓玫等[4]应用Ergocheck系统压力传感器进行测试。从而得出由于着力面积越小,压强值最大。在力学指标方面国外研究者进行了深入定量的研究。Hessell[5]发现预加载力与较大的作用力密切相关。而Herzog等[6]则实测施术者旋转手法时的各种力学变化。手法的力学研究应多多参考以上研究方法。
1.3颈椎旋转手法活体测量
目前国内外研究比较多的是颈椎手法的生物力学分析。Jimmw等[7]对颈椎扳转时的平均加速度、最大加速度与持续时间均进行了量化测量,为手法的力学测量提供了很多参考指标。Van zoest[8]等直接测量手法操作时医生肢体与患者间三维作用力,研究显示三维的力学参数对单方向的力学参数存在明显优势,且证明疗效的可靠性可通过手法操作的动态标准化保证。李义凯[9]等应用压力传感器,检测旋转手法作用过程中术者拇指顶推患者颈椎棘突的最大推力。Triano[10]提出腰椎“高速低幅冲击手法(High Velocity Low Amplitude thrusting manipulation)”的力学参数,分别对手法操作时峰值、预加载力、扳动速度、谷值、扳动时间等力学参数进行了具体的阐释,并在作力学曲线上标示(图1)。他的研究为很多研究者所公认和应用。
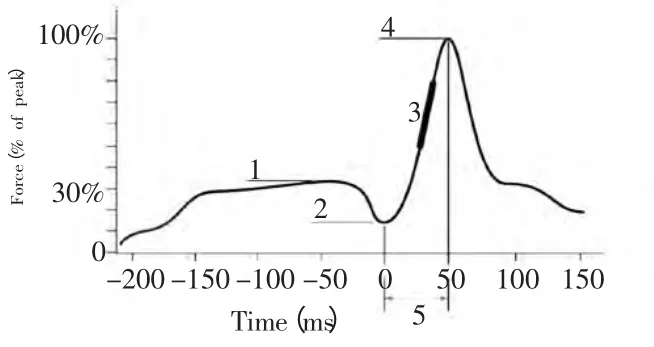
图1 Triano模拟旋转手法力学曲线图:1、预加载力(Preload):手法起始阶段作用于软组织的准静态载荷,2、谷值(Downward incisural point)冲击发力前预加载力下降最低值,3、扳动速度(Thrust speed)冲击相的斜率(△y/△x),4、峰值(Peak force)冲击作用力升高最大值,5、扳动时间(Thrust duration)冲击相开始至峰值的时间段。
国内的较深入的研究者有朱立国等[11]选择神经根型颈椎病患者施行旋转手法,活体实测手法操作者力学参数,测量左右手施行旋转手法时预加载力、最大作用力、扳动力都是相近的,旋转手法从缓慢上牵到扳动操作结束整个过程具有一定的规律性。王立恒[12]等对51名颈椎病患者施行旋转手法,测量不同痛阈值下力学参数以及手法治疗后的软组织张力。Wherzog[13]运用固定于患者颈部治疗区域的弹性压力薄板,测量过程中作用力的变化。其最大作用力范围从99 N-140 N。操作的作用时间为90-120 ms。房敏等[14]用电测技术观察颈部拔伸法的应力,测试不同施力点的拔伸力度,发现小角度前屈时手法安全,效果最佳。
1.4腰椎的扳动手法活体测量
力学效应是手法行为的本质,所以很多人对腰椎的扳动手法进行生物力学测量。Triano[15]指出手法给脊柱和它周围组织施加外部负荷以影响脊柱及其周围组织,但目前还不能预测哪种手法的优劣,应该将测量脊柱推拿生物力学参数,应用于手法疗效定量研究。姜宏[16]认为手法运动力学的动态变化对手法效应途径与作用环节起作用。陈守吉[17]指出手法的作用由手法刺激性、局部组织生物学特性、人体生理病理状态三个因素构成。徐海涛等[18]采用压力传感器方法主要研究力、力矩、时间以及力-时间曲线,通过压力检测系统,分析手法影响因素,测量发现左右肩部扳力分别为12.552±1.715 kg和12.748±1.645 kg,为该手法的临床操作提供了定量的、具体的力学参数。张军[19]等采集和分析了腰椎手法时,常规推拿手法,掌根或者肘部的压力信息。潘良春等[20]归纳正骨手法的力学特点为“轴向用力”、“旋转用力”、“侧方用力”,将旋转用力与侧方用力进行力学分析,这项研究非常有助于对不同手法力学的差异进行量化比较。Marcotte等[21]通过将微型压力传感器安装在施术者手上,记录推扳的压力在仰卧定点旋转手法过程中的变化,发现推扳力波动在4.0-41.0 N。
脊柱手法主要效应点在于腰椎关节突关节,很多研究者非常关注角度和姿势变化对关节突关节的影响,手法施加在关节突关节的载荷也与手法的疗效和副作用密切相关。这些研究者主要运用摄影技术方法研究手法或位移传感器的生物力学分析,观察力学指标主要是速度、时间、角度以及位移。侯筱魁[22]认为关节突关节错缝可以通过腰椎旋转手法得到调整。但有人认为手法过重伤及关节突关节和关节囊使一些患者经腰椎手法后,早期出现腰痛症状加重等现象。
2 数字化人体模型研究
随着计算机数字时代的到来,虚拟现实与仿真技术也突显出其重要的作用,人体建模仿真也日渐成为人机工程、计算机图形学、生物力学、交通事故分析、康复工程等多领域的研究热点。用于损伤与防护研究的数字化人体模型的发展经历了集总参数模型、多刚体动力学模型、多体动力学模型、有限元模型,目前正在探讨在虚拟人的基础上建立动力学生理模型。
2.1腰椎三维有限元分析
2.1.1腰椎三维有限元模型(Finite element models)关节突关节力学特征分析
腰椎三维有限元模型对于分析脊柱损伤及其功能紊乱的潜在机制,具有重大意义。叶淦湖[23]对腰椎关节突关节的模型进行各种手法的力学分解模拟,发现腰椎关节突关节在旋转推拿中具有主要的抵抗作用。关节在抗旋转运动时,主要通过上、下关节突关节面的直接接触,而关节囊可防止两个关节突关节面分开过大。他把关节突关节处理为接触模型,正确分析了关节突关节的力学功能。由于腰椎关节突关节面在下腰椎与矢状面呈45°的角,这样使其旋转的余地很小,对于正常腰椎来说,在有压缩载荷的条件下,椎间盘旋转时关节突关节在旋转1-2°时主要抵抗力为旋转力。
2.1.2三维有限元模型对手法的疗效及安全性评价
UenoK实验发现[24]关节软骨表层骨骨折的应力范围为14-59 MPa,平均为35.7 MPa。而尸体实验和有限元模型证明[25]前屈侧弯旋转手法使腰椎关节突关节的活动幅度最大,直立旋转手法次之,关节突关节最大应力均小于14 MPa,腰椎关节突关节的应力为21.98 N,不会造成关节突关节骨折。向左旋转时,右侧关节突关节间隙大,向右侧旋转时,左侧关节突关节间隙增大。当前屈最大时,关节突关节的上、下关节突可相对滑动5-7 mm,由于关节突关节突的反复活动,关节囊的伸缩,可松动神经根周围的粘连[26]。
从整个脊椎单元来看,除了手法使旋转侧椎间盘突出程度加重外,旋转力亦不大可能使椎间盘纤维环破裂,从这一点考虑,手法是安全的,除去椎间盘突出的位移,两侧椎间盘后外侧角位移基本一致,而旋转对侧的椎间孔在手法过程中,由于上位关节突关节的上移而扩大了椎间孔。毕胜[26]用有限元模型模拟手法作用时,发现椎间盘的髓核内压力牵扳手法最小且为负值,坐位旋转手法时最大。坐位旋转手法和斜扳手法外层纤维环应力最大,内层纤维环应力最大的是牵扳手法,手法均可造成椎间盘的后外侧与神经根之间移动,并且有限元方法与生物力学研究结果基本一致。他还对腰椎关节突关节的模型进行各种手法的分解模拟,发现腰椎关节突关节在旋转推拿中具有主要的抵抗作用。
2.1.3三维有限元模型的局限性
目前有限元模型分为两类:静力学和动力学研究模型。用于静力学分析的模型更加注重椎体的几何形态,模型往往只包含一两个运动节段。三维有限元的研究主要集中在骨折和椎体变形分析方面。在分析肌肉、韧带等软组织对脊柱系统的整体稳定、载荷分布、退变等因素的影响时,存在一定偏差。亦即,单纯采用有限元法分析脊柱局部的线性或非线性的变形尚不足以获得所分析单元的整体变形、载荷分布和局部位移特征。
2.2人体多刚体模型
多刚体模型能够避免人体内部的复杂调控机制,简单而较为真实的反应出人体运动的基本机理,具有广泛的应用领域。著名的Hanavan模型[27]将人体分为15个独立的刚体,各个刚体之间通过球形铰链连接在一起,建立力学方程组,通过求解得到运动模型参数。美国国家空军实验室[28]早在1975年就建立了三维多刚体假人ABT(Articulated Total Body)得到了广泛的应用。荷兰应用科学研究院(TNO)[29]采用多刚体系统动力学的方法构建了人体运动系统,使用椭球面模拟人体几何外形,建立了Hannavan多刚体假人,被广泛应用于包括汽车碰撞在内的众多领域[30]。
2.3神经-肌肉-骨骼综合模型
人体运动系统是一个非常复杂的综合非线性系统,需要神经、肌肉和骨骼的共同调控和相互协调。南非的Hatze[31]构建了一个2段5块肌肉3自由度的腿平面模型解决了踢脚动作的动力学最优化问题。Naomichi[32]等提出了更符合人体解剖学的肌肉-骨骼-神经系统的集成模型,考虑了中枢神经系统运动神经元的控制,然而这种建模方法十分复杂,同时人们对人体神经系统对肌肉的具体机理认识还不十分清楚,模型建立的难度很大,模型的计算也需要适当的简化。
2.4颈椎多柔体动力学模型
国外科研工作者开展的颈椎多柔体动力学模型主要针对汽车碰撞问题。Tien[33]等开发了人体头颈部系统数值模拟的算法和程序,然而无法模拟肌肉等软组织的力学行为。Merrill[34]等建立了包括2个胸椎、7个颈椎与头部的三维动力学模型,并使用无质量的弹簧和阻尼连接这些刚体,但该模型是二维的,肌肉模型也存在不足。Deng等[35]在Merrill基础上,将15组主要头颈部肌肉从参数模型里分离出来,使用3点肌肉模型模拟绕过颈椎时形成的弯曲,使肌肉模型更仿真。Jager[36,37]等建立了1、不单独考虑肌肉的全局模型2、单独考虑肌肉作用的细化模型,从而使仿真度有了部分改善。
国内多体动力学仿真方面的研究相对较少,张竟等[38]使用多体动力学软件建立了简单的人体头颈部多刚体动力学模型,但该模型仅考虑了4组主要肌肉,对肌肉力学行为的模拟不足。柳松杨等[39]对舰载机着陆过程中飞行员头颈部的动力学响应进行了仿真试验,但由于肌肉模型的限制,模型与实验结果还存在一定差距。鲁廷等[40]建立包括头部、7个颈椎和2个胸椎共10个刚体的头颈部多体动力学模型;采用集总参数法描述韧带、椎间盘等软组织的力学特性;采用最新的非线性应力-应变关系方法来描述人体头颈部15组肌肉的力学特性,并用多组汽车碰撞过程动力学响应实验数据对模型进行验证。
2.5腰椎多体动力学模型的建立
数字模拟仿真使得我们能够对人体的复杂结构和功能进行简化,从而避免了对人体内部多样运动的关注,而对主要影响因素和主要问题进行分析。其次,仿真模型突破了人体自身的局限性和测量仪器的局限性,使我们能够获得那些无法直接测量或者很难有效测量的参数、指标,便于我们对人体损伤机理及其防护的进一步研究。目前多刚体动力学仿真软件在车辆碰撞分析和冲击生物力学研究领域得到了广泛的使用。多体系统模型适合于人体动力学响应的模拟。专门针对软组织研究的多柔体动力学方法不仅具备三维有限元方法的变形和应力分析功能,而且可以更加方便地处理骨骼体与肌肉、韧带、间盘等软组织的相互作用、变形约束与协调以及相对运动。多体动力学模型可以被应用于人体动力学的各个方面,可以通过动力学仿真的方法获得人体的各个部分在运动中的状态以及相互作用或载荷分布的状态,完全可以胜任脊柱力学分析任务。能够获得探究各种载荷下脊柱及其周围软组织在各种力学条件下的受力状态、失衡状态等。总之,建立脊柱系统的多体动力学模型,就可以根据动力学仿真获其受力和失衡状态。
脊柱的力学模型在生物力学研究领域中已经有一段发展过程,学者利用脊柱力学模型[41,42]研究了脊柱载荷、脊柱的病变、动力学损伤、脊柱稳定性等等。有限元方法和多刚体模型被广泛用来建立脊柱力学模型。有限元方法可以建立较为细致的分析变形-应力关系的力学模型,但不能很好地描述脊柱运动学和复杂连接关系。随着计算力学和计算机运算能力的发展,多体动力学已经由初期的多刚体动力学模型发展到了目前的多刚体-柔性体耦合的动力学模型。因此可以说多柔性体动力学融合了有限元法和多刚体动力学的优势。在生物多体动力学方面,国外较为著名的软件有OpenSim[43]和Anybody[44]两款软件。UC伯克利大学的Miguel Christophy[45]在OpenSim软件中建立了包含238条肌肉的脊柱模型,但是没有考虑关节突、韧带等组织的影响。国内上海交通大学的聂文忠[46]利用有限元建立了一个脊柱胸腰部生物力学模型,但是其肌肉是以力边界的形式给出。目前国内外研究中,鲜有包含较为完整软组织的脊柱模型。
郭伟[47]使用清华大学航天航空学院开发的多柔体动力学分析软件,能分析非线性的多个运动体间相互关系,而且在弹性体的模型构建上非常有优势。目前已经研制一套以绝对节点坐标建模方法为理论基础的柔性体动力学求解器-THUSolver。该方法能够进行各种条件下力学分析(包括失重和过载状态),已经用于飞机各种飞行状态下动力学分析。
2.5.1骨骼模型建立
建立骨骼模型的动力学模型,需要其骨骼相应的三维几何、质量信息。随着计算机技术的发展,可以通过人体两维断层影像来重构人体骨骼的三维数字模型,如Minics软件。OpenSim的源代码[48]是开源的,用户可以使用其建立相关的人体肌骨模型,也可以使用其相关的文件、信息在其他软件中建立模型。
2.5.2关节突接触
椎骨和椎骨之间,通过上下关节突的接触约束了腰部的扭转自由度。关节突之间的接触应力是关心的内容,其接触力可以使用赫兹接触模型[49]。
2.5.3椎间盘模型
椎间盘是一个被动结构,在维持脊柱的稳定性方面起到重要作用。椎间盘的力学模型是脊柱力学分析中的一个核心内容。一般认为,椎间盘对椎骨的反作用力与椎骨间的相对位移有关系[50][51]。Panjabi的线性刚度阵模型表现出一种类似于梁的性质。Gardner-Morse[52]提出了用剪切梁模型来代替K矩阵。取剪切梁的椎间盘模型的弹性模量为E=1E7,泊松比=0.49。拟合了在轴压为150 N的几何数据[11]。
2.5.4韧带建模
不同的韧带,其力学性质有着明显的不同。韧带的应变-应力曲线通常是非线性的。下图是黄韧带的力学性质曲线。

图2黄韧带应变-力关系
2.5.5肌肉建模
人体肌肉结构及其力学特性十分复杂。目前大部分生物力学研究中,骨骼肌模型通常采用直线或曲线来构建,其中直线或曲线称为肌肉路径[55-57]。肌腱的力学行为则等效为非线性的弹簧阻尼器。
3 目前研究中的问题
当前有关脊柱生物力学实验的研究主要是围绕椎体附件进行研究,尤其是骨折、植入物的垂直剪切力关注较多,对肌肉、韧带、关节囊等椎旁软组织关注少。局部(如腰椎4-5、腰5-骶骨,椎弓根的应力应变)关注多,而对整体(脊柱-骨盆-肌肉-韧带之间的关系)关注较少。更未发现脊柱失衡条件下不同手法对于脊柱软组织、椎间盘和关节突关节影响的实验研究。脊柱椎旁肌和韧带组织的实验研究之所以比较少,除了基础实验的研究者关注点不同,还可能缘于应力指标的选择比较局限。但这一点恰好是临床上脊柱损伤病理过程及脊柱手法安全实施的关键环节。
4 展望
总之,当前常见的脊柱力学模型的建立虽然为脊柱创伤带来了一些研究成果,甚至在如何规范、量化手法操作方面也提出了一些原则性看法,但很难具备指导临床应用的作用。主要原因就是既往脊柱建模的目标仍然主要局限于椎体和间盘的创伤,相关肌肉和韧带组织的损伤应力指标研究并不精确。而这一点恰好是脊柱损伤及脊柱手法安全实施的关键环节。我们知道,关节稳定结构——韧带与肌肉等软组织的力学失衡是导致最终脊柱结构力学失衡(骨折或间盘突出)的关键。所以,我们不仅要重视骨折、植入物的固定等刚体的变化,还应该特别重视软组织在脊柱运动应力损伤中的临床意义。多柔体动力学分析法与计算机可视化技术的出现正是此领域所迫切需要的技术。所以,有关脊柱手法的生物力学研究重点应该是1、各种脊柱力学失衡状态下和实施手法时的椎旁肌及韧带组织的应力测定,2、基于以上研究的基础结合数字化人体仿真技术构建包括腰椎主要肌肉和韧带的多柔体动力学模型的建立。以上两方面的研究不仅丰富和完善关于脊柱运动应力损伤的机制研究,还对确立脊柱手法实施的安全原则具有重要的临床意义,是脊柱生物力学研究未来发展的方向。
[1]Tomas F.Chiropractic Technique:Principles and Procedures[M].Elservier(Singapore),2013.87-89.
[2]MaekoVW,MatthewsLW,ZwirkoskiP,et al.Thejoint ontactarea of the ankle:the contribution of the posterior malleolus[J].Bone Joint Surg,1997,3:347-351.
[3]John J Triano,Marion McGregor,Dennis R Skogsbergh.Use of chiropractic manipulation in lumbar rehabilitation[J].Journal of Rehabilitation Research and Development,1997,34(4):394-404.
[4]邓玫,刘红萍,张晓刚,等.五种按法最大压强的比较研究[J].按摩与导引,2005,21(7):14-16.
[5]HessellBw,Herzogw,eonwayPJ,et al.Experiment measurement of the fore during spinal manipulation using the Thompson technique[J].Journal of manipulative and physiological therapeutics,1990,13(8):448-453.
[6]HerzogP.J,Conway,G.N,Kawehuw,et al.Forces exerted during spinal elative therapy[J].Spine,1993,18(9):1207-1208.
[7]JimMW,Daniel Chow,Andrew D.The kinematics and intra-and inter-the rapisteonsisteneies of lower cervical rotational manipulation[J].Medical Engineeringffamp;Physies,2005,27:396-400.
[8]Van zoest GG,GosselinG.Three-dimension analyze forces in chiropractic spinal manipulative therapy[J].Journal of Manipulative and Physiological Therapy,2003,26(9):549-556.
[9]李义凯,徐海涛,王国林,等.颈椎定点旋提手法所致咔哒声响与最大扳动力的量效关系研究[J].中国康复医学杂志,2004,19(9):644-646.
[10]TrianoJJ,Carol M.Rogers,SarahCombs,et al.Quantitative feedback versus standard training for cervical and thoracic manipulation[J].Manipulative Physical Ther,2003,26(3):131.
[11]朱立国,冯敏山,毕方杉,等.颈椎旋转(提)手法的活体力学测量[J].中国康复医学杂志,2007,22(8):673-674.
[12]王立恒,孙树椿,陈朝晖,等.手法治疗颈椎病的在体力学测量[J].中国中医骨伤科杂志,2009,17(3):22-24.
[13]Wherzog.Force secreted during Spinalmanipulative therapy[J].spine,1993,18(9):1206-1212.
[14]房敏,严隽陶,沈国权,等.颈部推拿拔伸手法的 在体 研究[J].颈腰痛杂志,2000,21(3):202-204.
[15]TrianoJ.Biomechanics of spinal manipulative[J].The spinal journal,2001,l:121-131.
[16]姜宏,施祀.颈椎手法的生物力学研究与探索[J].中国中医骨伤科杂志,2014(2):51-53.
[17]陈守吉,许世雄,史一蓬,等.中医推拿摆动类手法的动力学研究(工)生物力学模型及方程[J].医用生物力学,1996,2(2):112.
[18]徐海涛,徐达传,李义凯,等.腰椎斜扳手法所致“咔嗒”声时推扳力的研究[J].中国康复医学杂志,2005,23(3):202-204.
[19]张军,韩磊,胡磊,等.推拿手法培训系统的研制及应用[J].中国中医骨伤科杂志,2009,17(2):60.
[20]潘良春,周太安,周奉皋,等.中医正骨手法中的力学机制[J].海军医学杂志2009,28(l):694-696.
[21]Marcotte,Normand.Measurement of the Pressure applied during motion palpation and reliability for cervical spine rotation[J].Manipulative Physiol ther,2005,28(8):591-600.
[22]侯筱魁,董凡,赵文成.斜扳时完整腰椎三维立体运动的研究[J].中国骨伤,1996,9(4):5-7.
[23]叶淦湖,张美超,李义凯.模拟推拿时腰椎关节突关节有限元模型的生物力学分析[J].广州中医药大学学报,2003,20(3):195-200.
[24]UenoK,LiuYK.A3-D nonlinear finite element model of lumbar intervertebral joint intorsion[J].Journal of Biomechanical Engineering,1987,109:200-209.
[25]高允海.有限元分析法研究脊柱生物力学的新进展[J].国外医学-生物医学工程分册,2003,26(6):281-284.
[26]毕胜,李义凯,赵卫东,等.腰部推拿手法生物力学和有限元比较研究[J].中华物理医学与康复杂志,2002,24(9):525-527.
[27]Wojciech Blajera,Adam Czaplickib.Modeling and inverse simulation of somersaults on the trampoline[J].Journal of Biomechanics,2001,3(4):68-69.
[28]Zhou Xiaodong,Louis F Draganich,Farid Amirouche.A dynamic model for simulating a trip and fall during gait[J].Medical Engineering and Physics,2002,24(4):29-30.
[29]陈健、姚颂平.虚拟现实技术活体育运动技术仿真中的应用[J].体育科学,2006,26(9):34-39.
[30]张晓云,金先龙,申杰.基于人体损伤特征的车—人碰撞事故再现模拟与分析[J].机械工程学报,2010,46(12):78.
[31]Hatze,Gentaro Taga.A model of neuro-muscule-skeletal system for anticipatory adjustment of human locomotion during obstacle avoidance[J].Biological Cybernetics,1988,78:89-90.
[32]Naomichi Ogihara Naomichi Ogihara,Nobutoshi Yamazaki.Generation ofhuman bipedal locomotion by a bio-mimetic neuro-musculo-skeletal system[J].Biological Cybernetics,2001,84:90-91.
[33]Tien CS,Huston RL.Biodynamic modeling of the head/neck system.In:Field accidents data collections,analysis,methodologiesand crash injury reconstructions[J].Warrendale,USA:Society of Automotive Engineers,1995,359-364.
[34]Merrill T,Goldsmith W,Deng YC.Three dimensional response of a lumped parameter head neck model due to impact and impulsive loading[J].JBiomech,1984,17(2):81-85.
[35]Deng YC,Goldsmith W.Response of a human head/neck/upper-torso replica to dynamic loading-Ⅱanalytical/numerical model[J].J Biomech,1987,20(5):487-497.
[36]Jager M,Sauren A,Thunnissen J,et al.A 3D head-neck model:Validation for frontal and lateral impacts[C].Proceedings of the 38th Stapp Car Crash Conference.Fort Lauderdale,USA,1994.9,46-47.
[37]Jager M,Sauren A,Thunnissen J.A global and a detailed mathematicalmodel for head-deck dynamics[C].Proceedingsof the40th Stapp CarCrash Conference.Albuquerque,USA,1996.9,89-92.
[38]张竟,韩旭,文桂林.基于ADAMS LifeMOD的人体头颈部动力学仿真与验证[J].系统仿真学报,2008,20(10):2718-2721.
[39]柳松杨,丛红,王鹤,等.军机飞行员的颈部损伤研究[J].医用生物力学,2010,25(4):262-265.
[40]鲁廷,王亚伟,柳松杨.拦阻着舰过程中飞行员头颈部的动力学响应[J].医用生物力学,2012,27(6):642-646.
[41]N.Bogduk,J.E.Macintosh,and M.J.Pearcy.A universal model of the lumbar back muscles in the upright position[J].Spine,1992,17(8):897-913.
[42]Aubin,C.E,Petit,Y,StokesI.A.F,Poulin F,Gardner-MorseMG,LabelleH.Biomechanical modelingof posterior instrumentation of the scoliosisspine[J].ComputerMethods in Biomechanics and BiomedicalEngineering,2003,6:27-32.
[43]Delp S.L,et al.OpenSim:Open-Source software to create and analyze dynamic simulations of movement[J].Biomedical Engineering,2012,54(11):1940-1950.
[44]Michael Damsgaarda,John Rasmussena,Christensena,Egidijus Surmaa,Mark de Zee.Analysis of musculoskeletal systems in the anybody modeling system[J].Simulation Modelling Practice and Theory,2006,14(8):1100-1111.
[45]Miguel Christophy,Nur Adila Faruk Senan,Jeffrey C.A musculoskeletal model for the lumbar spine[J].Biomech Model Mechanobiol,2012,11:19-34.
[46]聂文忠.脊柱胸腰部的生物力学建模与应用研究[D].北京:上海交通大学机械与动力学院,2009.38-39.
[47]郭伟,陈立君,王飞.腰椎三维有限元模型的建立及高载荷(Gz)环境的受力分析[J].空军医学杂志,2013,29(2):74-75.
[48]http://opensim.stanford.education.
[49]虞磊.基于绝对节点坐标法的柔性多体系统建模与计算方法研究[D].北京:清华大学航天航空学院,2010.39-40.
[50]PanjabiM.M.,BrandR.A.,White IIIA.A.Three-dimensionalflexibility and stiffness properties of the human thoracic spine[J].Journal of Biomechanics,1976,9:185-192.
[51]Miguel Christophy,Maurice Curtin et al.On the modeling of the intervertebral joint in multibody models for the spine[J].Multibody Syst Dyn,2013,30(4):413-432.
[52]Mack G.Gardner-Morse,Ian A.F.Stokes.Structural behavior of human lumbar spinal motion segments[J].Journal of Biomechanics,2004,37:205-212.
[53]Alf L.Nachemson.Some mechanical propert ies of the third human lumbar interlaminar ligament(ligamentum flavum)[J].Journal of Biomechanics,1968,1(3):211-214.
[54]Eberlein,Holzapfel,Frohlich.Multi-segmentFEA of the human lumbar spine including the heterogeneity of the annulus fibroses[J].Computational Mechanics,2004,34:147-163.
[55]Myer Kutz.Biomedical Engineering and Design Handbook Volume 1:Fundamentals(Second Edition)[M].McGraw-Hill Professional,2009.164-169.
[56]TangG,WangC.A muscle-path-plane method for representing muscle contraction during joint movement[J].Computer Methods in Biomechanics and Biomedical Engineering,2010,13(6):723-729.
[57]GarnerB,PandyM.The obstacle-set method for representing muscle paths in musculoskeletalmodels[J].Computermethods in biomechanics and biomedical engineering,2000,3(1):1-30.
猜你喜欢
中学生数理化·中考版(2023年7期)2023-06-27 09:01:14
今日农业(2021年20期)2021-11-26 01:23:56
快乐语文(2021年11期)2021-07-20 07:41:42
快乐语文(2021年11期)2021-07-20 07:41:32
国际放射医学核医学杂志(2021年10期)2021-02-28 08:43:02
快乐语文(2020年30期)2021-01-14 01:05:28
今日农业(2020年15期)2020-12-15 10:16:11
广东第二课堂·初中(2020年3期)2020-04-02 07:08:33
中国生殖健康(2019年2期)2019-08-23 08:12:00
中学生天地(A版)(2016年5期)2016-05-14 04:31:32
