卫星云图上自动识别追踪MCS方法
2014-11-27 02:02:56吴俊杰
中国民航大学学报 2014年2期
段 炼,刘 帆,吴俊杰
(中国民航飞行学院空中交通管理学院,四川 广汉 618307)
中尺度对流系统(mesoscale convective system,MCS)是一种水平尺度在2~2 500 km并伴有强烈对流运动的天气系统,常伴有冰雹、雷暴、飑线和龙卷等强对流天气现象的发生。误入其中的飞机常会遭受强烈颠簸、积冰、雷击以及恶劣能见度等因素的影响,不仅对机体结构造成巨大的破坏,还对飞行机组、乘客人身安全产生了严重的威胁。如:1999年6月1日,受强雷暴天气的影响,美利坚航空公司的一架喷气式客机在降落接地后冲出跑道,134位乘客和机组人员险些遇难。2000年6月22日13时,在武汉市出现的短时强雷暴天气造成武汉航空公司Y7/B3479号飞机坠毁失事,机上4名机组人员和38位旅客全部遇难。因此,对MCS所在位置准确地识别并对其发展移动趋势精确地追踪、预测显得尤为重要。由于MCS具有生命周期短和空间尺度小的特点,故使用一般的常规监测方法难以对其所在位置和发展趋势进行准确有效的监测和预报。然而,随着卫星遥测和雷达探测能力的提高,目前主要使用高时空分辨率的静止卫星红外云图和天气雷达对MCS监测、预报分析。特别是静止气象卫星在雷暴、冰雹、龙卷等中小尺度强对流天气预报和监测方面取得了较大发展。
白洁、王洪庆等人[1]利用区域平滑滤波和阈值剔除相结合的方法过滤出强对流云团,通过粗、细对比分析两个模式匹配过程对强对流云团进行追踪。师春香、吴蓉璋等人[2]使用多阈值和神经网络自动分割技术实现卫星云图云系的自动识别。方兆宝,林珲等人[3]通过对流形群运动目标的形状特征进行分析,利用最大欧几里得贴近度的择近原则和交叉匹配算法识别和追踪MCS。李汇军、孔玉寿[4]使用Gauss函数调制满足连续小波基函数的正弦波从卫星云图中提取对流云团。费增坪、王洪庆等人[5]通过对MCS云团识别标准重新定义,使用时间序列分析技术和时间序列特征统计法完成MCS的自动识别、存储和追踪。束宇,潘益农[6]通过静止卫星的红外云图数值资料,利用计算机图形学的知识快速并且较为准确的普查到MCS。李森,刘健文等[7]使用“逆向搜索法”获取强对流云团的轮廓信息,通过对轮廓线进行平滑处理,从而实现对卫星云图强对流云团的识别。王华荣,何光碧等[8]分析了四川盆地的西南低涡暴雨云团生消过程,并详细分析了卫星红外和水汽通道云顶亮温与对流云团降水之间的关系特征。翟菁,胡雯等[9]利用雷达观测结果和数值模拟结果,对一次天气过程对流云合并进行模拟,并分析了合并过程的回波结构和云物理变化特征。本文参照费增坪、王洪庆等人[5]所改进的MCS识别与追踪判定标准,研究利用Matlab图像处理技术实现MCS的自动识别和追踪。
1 MCS自动识别
1.1 MCS判别标准
Maddox于1980年从美国堪萨斯州卫星服务站提供的增强显示红外卫星云图中识别出一种α中尺度对流系统,并把该对流系统定义为中尺度对流复合体(MCC)。次年,Maddox通过详细研究和分析对成熟阶段的MCC给出定义,如表1所示。

表1 Maddox的MCC定义[10]Tab.1 MCC definition of Maddox
各国学者对Maddox定义的MCC判别标准进行详细研究和分析后,发现该判别标准过于严格,有时与实际情况相差甚远,因此许多研究人员根据各国实际情况对MCC的判别标准做了修订。中国研究人员对MCC的修订也做了大量工作,李玉兰、王倩熔、郑新江等[11]根据Maddox的定义并结合GMS图像资料总结出我国的MCC数量较少,生命周期较短的特点。项续康、江吉喜[12]从数字红外云图中的10个典型MCC案例结果发现我国MCC的偏心率比北美小,故将MCC判别标准中冷云区最大面积时的偏心率改为≥0.6。马禹,王旭等[13-15]根据Orlanski的尺度分类标准,率先提出将MβCS定义为TBB≤-32℃,且短轴长度为1.5~3.0个纬距的连续的冷云区。费增坪,郑永光等[5,15-16]根据Orlanski尺度分类标准对MβCS普查最小尺度标准进行了修正,将MβCS定义为TBB≤-32℃,直径≥20 km的连续冷云区[5][15-16]。研究所使用的MCS判别标准为费增坪,王洪庆等[5]所改进的MCS识别与追踪判定标准(表 2)。
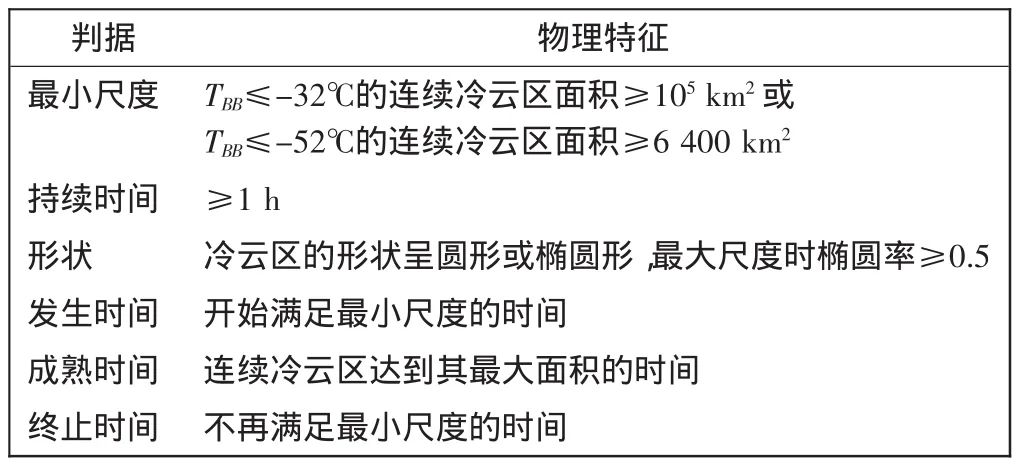
表2 MCS的识别判据[5]Tab.2 Identification criterion of MCS
1.2 卫星数据处理
红外辐射亮温资料(TBB)来源于国家卫星气象中心FY-2D红外窗区探测通(10.5~12.5 μm)测量的辐射值,通过使用普朗克函数将其转换为云顶或地球表面的黑体辐射亮度温度(以下简称为亮温),数据格式为HDF5。Matlab具有功能强大、简单易学、运用灵活等特点,包含大量的HDF应用程序和函数,仅几个简单的函数命令即可实现数据提取,无需大量繁琐的编程工作,读取HDF格式数据非常方便。基于上述特点,利用Matlab处理HDF数据。处理过程如下:
1)使用hdf5read函数读取HDF5格式亮温数据;2)将每个时次的亮温数据提取出来;
3)使用fopen,fwrite函数,将亮温数据保存为二进制格式存放。
1.3 数据矩阵转化为图像
二进制格式数据具有最高的数据存储效率、一定的数据隐蔽性和极大地节省磁盘存储空间等特点,故亮温数据使用二进制格式存放。Matlab中的文本操作函数fopen,fread能够快捷、有效地读取所存放的二进制数据,如图1所示。Matlab中的函数mat2gray能够实现图像矩阵的归一化操作。通过调用格式:I=mat2gray(A,[aminamax]),将图像矩阵 A 中介于 amin和 amax的数据做归一化处理,并将小于amin的元素都变为0,而大于amax的元素都变为1,处理结果如图2所示。
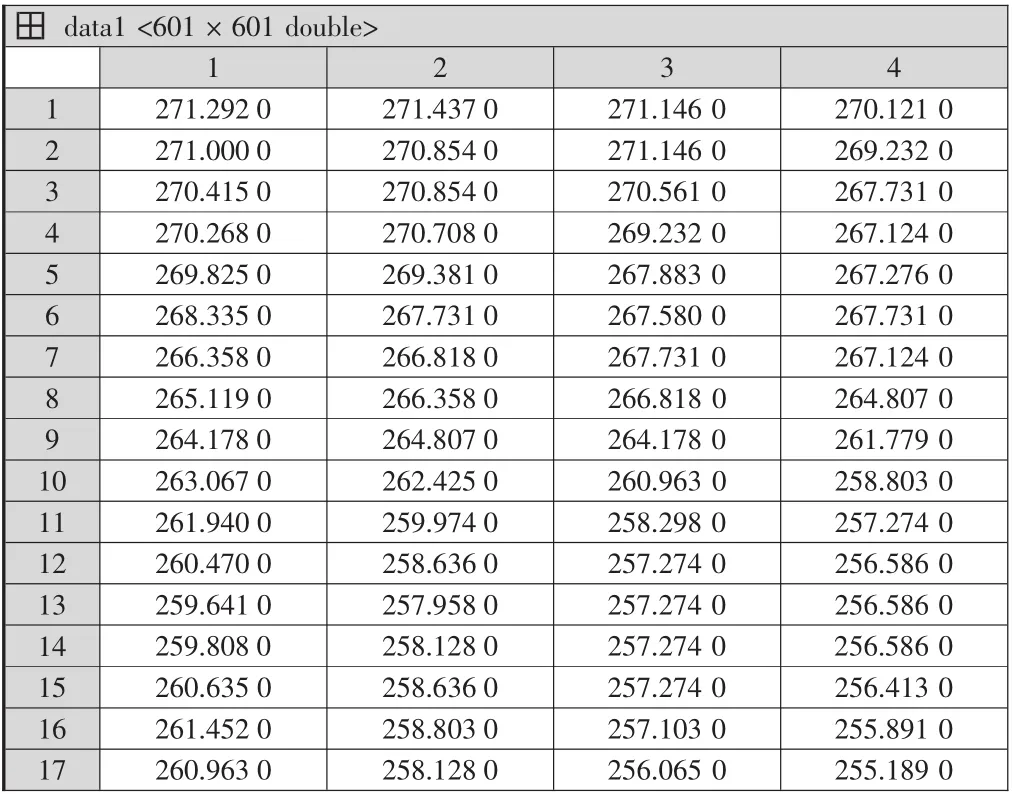
图1 TBB的二进制数据(部分)Fig.1 TBBbinary data(part)

图2 数据矩阵转化的灰度级图像Fig.2 Grayscale image transformed by data matrix
1.4 图像二值化和边缘检测
在将数据图像转化为灰度级图像后,通过阈值化处理可将灰度级图像转换为二值化图像,其中二值化阈值采用MCS识别判据中的-52℃,即转化为K氏温度为221.15。使亮温数据低于此阈值的像素点标记为1,其他情况标记为0。图3为二值化阈值处理后的图像。
冬季,一些厚的层状云也具有Maddox特征,为了区分其与MCS的差别,对识别出的MCS云团进行边界检测,提取边界灰度梯度大的云团,以提高对流云的识别率。Canny边缘算子具有低误判率,高定位精度,抑制虚假边缘的特点,利用Canny边缘算子进行边缘检测,梯度阈值选用0.5[17]。Canny算子的计算公式如下[18]:

图3 按照亮温判据℃得到的二值图像Fig.3 Binary image acquired by TBBcriterion TBB≤-52℃

其中:▽2f(x,y)为处理后像素(x,y)处的灰度值,f(x,y)为具有整数像素坐标的输入图像。
1.5 特征参数计算和MCS提取
通过二值化图像识别MCS,还需提取描述目标云团形态特征和强度特征的特征量。这些特征量主要包括:云团的质心坐标、几何中心坐标、特征面积、平均亮温值、椭圆率等。通过分析这些特征量,根据MCS识别判据,将面积小于6 400 km2以及椭圆率小于0.5的目标云团去除,那么剩余的目标云团则为可能的MCS云团,如图4所示。

图4 按照MCS识别判据提取的目标云团Fig.4 Target cloud acquired by MCS identification criterion
目标云区特征参数的计算方法如下所述:
1)云团所在位置:几何坐标点和质心坐标点用以描述目标云团所在的位置,其中质心点表示目标云团的物理特征,几何中心点表示其形态特征,二者存在一定的差异。
几何中心点的坐标公式为
质心点的坐标公式为

其中:n为区域目标云团像素点个数,xi、yi为第i个像素点的坐标,f(i)为第i个像素点的亮温值,fz为区域目标云团亮温值的累加总和,即
2)特征面积:目标云团内所包含的像素点的总数为目标云团的特征面积,用于衡量目标云区的范围和强度。
3)椭圆率:通常椭圆率用于描述目标云区形状的复杂程度,可用公式k=(4π×s)/c2近似表示。其中,k为椭圆率,s为目标云区的面积,c为目标云区的周长。
4)平均亮温值:平均亮温值是目标云区内各像素点对应亮温的平均值,用以判定对流云区的强度,用公式表示。
2 MCS自动追踪
MCS自动追踪是通过计算并分析相邻时间段内目标云团面积、质心位置、强度等特征量的变化,检验其是否满足目标匹配原则,如表3所示。进而判定其是否为同一目标云团,从而实现MCS的追踪。
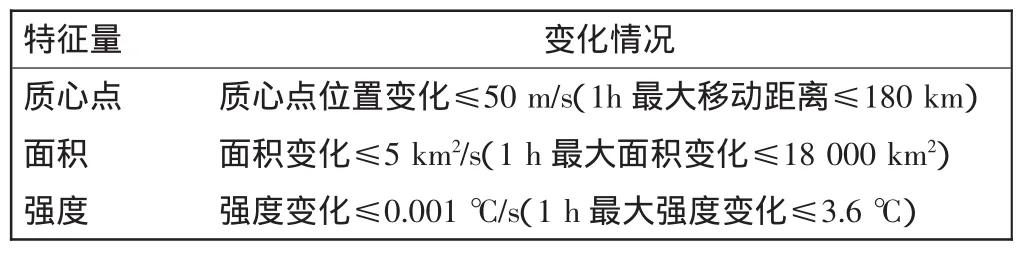
表3 MCS追踪的目标匹配原则[5]Tab.3 Target cloud matching principle of MCS tracking
若相邻时间段内的目标云团满足上述目标匹配原则,那么可以断定其为同一目标云团。否则,云团消失,不再符合对流云团的特征。云团的发展演变一般有以下几种情况:
1)一般发展情况:前一时间段内的1个目标云团指向下一时间段的1个目标云团;
2)合并:前一时间段内的若干个目标云团指向下一时间段内的1个目标云团;
3)分裂:前一时间段内的1个目标云团指向下一时间段内的若干个目标云团;
4)消失:前一时间段内的目标云团在后一时间段内未能找到满足目标匹配原则的云团。
根据上述目标匹配原则,MCS追踪结果如图5所示。

图5 MCS的自动追踪过程Fig.5 MCS automatic tracking process
根据MCS的识别判据,对第1时段识别出的MCS目标云团做标记,如图5(1)所示。将所有识别出的MCS目标云团用红色边界圈出并用蓝色字母标记。根据目标匹配原则,对MCS云团的特征量进行计算分析并将第2时段追踪到的满足MCS特征的目标云团做相应的标记,如图5(2)所示。由图5(2)可看出目标云团E已不满足MCS特征。同理,第3~6时段追踪到的MCS目标云团,分别如图5(3)~图(6)所示。特别说明,图5(4)中的G、H目标云团为新生的MCS云团,但根据相邻时次目标匹配原则,其强度、面积等特征量在第5时段已不满足MCS判别标准,故不再对其做标记,如图 5(5)所示。
3 结语
根据费增坪、王洪庆等人[5]所改进的MCS识别与追踪判定标准,将Matlab图像处理技术运用到MCS识别追踪中。首先使用Matlab提供的HDF应用程序和函数对卫星数据进行提取分析并将数据矩阵转化为图像。然后通过阈值化处理将灰度级图像转换为二值化图像,根据MCS的识别判据对其特征参数进行提取计算,实现MCS的识别。最后,基于MCS追踪目标匹配原则对相邻时段目标云团的特征量进行计算分析,完成MCS的追踪。从实验结果来看,所使用的方法能够很好地实现MCS自动识别追踪,但在追踪过程中,对于新生MCS云团的特殊情况,还需介入一些人为干预。这是今后需要改进和完善的重点。此外,由于静止卫星投射角度以及图像坐标和地理位置坐标转换存在的误差等因素的影响,MCS的识别和追踪可能存在一些偏差,需更多资料和实验的检验。
[1]白 洁,王洪庆,陶祖钰.GMS卫星红外云图云迹风的反演[J].北京大学学报(自然科学版),1997,33(1):85-92.
[2]师春香,吴蓉璋,项续康.多阈值和神经网络卫星云图云系自动分割试验[J].应用气象学报,2001,12(1):70-78.
[3]方兆宝,林 晖,吴立新,等.流形群运动目标自动识别与跟踪技术研究—以 MCS 自动追踪方法为例[J].遥感学报,2004,8(1):14-22.
[4]李汇军,孔玉寿.应用连续小波变换提取对流云团[J].解放军理工大学学报(自然科学版),2005,6(2):181-186.
[5]费增坪,王洪庆,张 焱,等.基于静止卫星红外云图的MCS自动识别与追踪[J].应用气象学报,2011,22(1):115-122.
[6]束 宇,潘益农.红外云图上中尺度对流系统的自动识别[J].南京大学学报(自然科学),2010,46(3):337-348.
[7]李 森,刘健文,刘玉玲.基于FY2D静止卫星云图的强对流云团识别[J].气象水文海洋仪器,2010,27(2):72-78.
[8]王华荣,何光碧,谌贵殉.西南低涡对流云团及其降水的一些特征[J].高原山地气象研究,2012,32(2):26-31.
[9]翟 菁,胡 雯,冯 妍,等.不同发展阶段对流云合并过程的数值模拟[J].大气科学,2012,36(4):697-712.
[10]MADDOX R A.Mesoscale convective complexes[J].Bull Amer Meteor Soc,1980,61(11):1374-1387.
[11]李玉兰,王倩熔,郑新江,等.我国西南—华南地区中尺度对流复合体(Mcc)的研究[J].大气科学,1989,13(4):417-422.
[12]项续康,江吉喜.我国南方地区的中尺度对流复合体[J].应用气象学报,1995,6(1):9-17.
[13]马 禹,王 旭,陶祖钰.中国及其邻近地区中尺度对流系统的普查和时空分布特征[J].自然科学进展,1997,7(6):701-706.
[14]陶祖钰,王洪庆,王 旭,等.1995年中国的中-α尺度对流系统[J].气象学报,1998,56(2),166-177.
[15]ORLANSKI L A.A rational subdivision of scales for atmospheric process[J].Bull Amer Meteor Soc,1975,56(5):527-530.
[16]费增坪,郑永光,张 焱,等.基于静止卫星红外云图的MCS普查研究进展及标准修订[J].应用气象学报,2008,19(1):82-90.
[17]包晓丹.基于卫星云图的对流云自动识别方法研究[D].广汉:中国民用航空飞行学院,2011.
[18]秦襄培,郑贤中.Matlab图像处理宝典[M].北京:电子工业出版社,2011.
猜你喜欢
少先队活动(2021年3期)2021-12-04 13:08:26
中国农资(2019年44期)2019-12-03 03:10:46
特别健康(2018年3期)2018-07-04 00:40:18
名家名作(2017年3期)2017-09-15 11:13:37
物理学报(2017年11期)2017-08-09 07:34:04
光学精密工程(2016年4期)2016-11-07 09:05:37
发明与创新(2016年26期)2016-08-22 03:23:28
润·文摘(2016年4期)2016-07-13 04:13:03
电测与仪表(2016年6期)2016-04-11 12:06:38
小天使·四年级语数英综合(2015年3期)2015-04-20 18:01:32