仿生机器鱼运动控制方法综述
2014-11-26 01:50:46王耀威纪志坚翟海川
智能系统学报 2014年3期
王耀威,纪志坚,翟海川
(青岛大学自动化工程学院,山东青岛266071)
鱼类作为自然界最早出现的脊椎动物,其种类繁多,生活环境各异,为了觅食、御敌、繁殖后代和集群洄游等生存需要,经过亿万年的自然选择进化出了非凡的水中运动能力,其游动具有推进效率高、机动性强、隐蔽性好、噪声低等优点[1]。鱼类在水中游动的完美性,吸引着大批学者研究鱼类的运动机理和开发仿鱼类水下机器人。
人类的发展离不开资源的持续供应,随着陆上资源的日益紧缺,未来海洋资源的开发成为现在研究的热点。随着人类科学和技术的不断发展进步,适应各种非结构化环境的水下机器人将会得到迅猛的发展。传统的基于螺旋桨的人造水下航行器,在启动、加速性能、运动灵活性、受承载空间等方面的缺点限制了其作业时间和范围,进一步限制了其应用领域[2]。仿生机器鱼作为一种结合了鱼类推进模式和机器人技术的新型水下机器人,与传统的基于螺旋桨的人造水下航行器相比,具有以下几方面基本特性[3]:1)推进效率高,运动能力强,机动性能好;2)系统结构简化,机械结构简单;3)流体性能优良;4)体积小、重量轻、隐蔽性强。仿生机器鱼的这些优点将会使其在以下领域得到广泛应用:
1)仿生机器鱼可在要求作业范围大、时间长、机动性好的场合得以应用,如环境监测、管道内部结构监测、海底救生等;
2)在军事方面,仿生机器鱼良好的隐蔽性可使其作为水下侦察器或攻击性武器;
3)海洋资源开发方面,由于仿生机器鱼在游动的方式和外形上皆与鱼类相似,因此,在人类开发海洋资源和研究海洋生物资源的同时,可有效降低人类活动对海洋生态环境造成的破坏;
4)可构建多机器鱼协作系统,用来完成单个机器鱼无法完成的复杂水下任务[4];
5)在娱乐方面,随着机器人制造工艺的进步和技术创新,用于娱乐和观赏用途的仿生机器鱼将以优美的姿态和低廉的价格走向市场[5-6]。
仿生机器鱼在以上方面获得了广泛应用,而寻求一种最优高效地仿生机器鱼运动控制方法,使机器鱼更加准确和高效地完成任务成为研究的重点。本文在仿生机器鱼研究进展综述文献[7-12]的基础上,结合仿生机器鱼运动控制最新成果,对仿生机器鱼的运动控制方法进行了总结和归纳,为相关领域工作者提供有益的参考。
1 仿生机器鱼运动分析
仿生机器鱼运动控制方法可大致分为3类:基于运动学模型、基于动力学模型和仿神经元网络控制的方法。
1.1 基于运动学模型的方法
此方法是通过经验观测鱼类游动时身体的形状曲线来产生机器鱼关节的摆角。鱼类行为学家研究表明,鱼类的推进运动中隐含着一种由后颈部向尾部传播的行波。受此启发人们尝试从运动学的角度来研究鱼类的推进,以避免复杂的水动力学分析。国外对该种方法的研究起步较早。1960年,Lightill首次基于“小振幅位势理论”建立了分析鱼类鲹科推进模式的数学模型,这是鱼类推进模式研究历史上第一个关于鲹科推进模式的数学模型[13]。1996年,美国麻省理工学院的Barrett等通过实验研究,认为鱼体游动呈波动状态,鱼体波为一波幅渐增的正弦曲线,鱼体波波幅包络线具有二次曲线特征,鱼体波可以通过波幅包络线与正弦曲线的合成得到[14]。
为了产生类似鱼类的游动步态,Yu和Liu用鱼类学家对游动鱼体观测得到的运动学方程作为模型,来产生类似鱼类的游动步态,采用离线数值拟合的方法获得多个关节的控制量,并对机器鱼各个关节之间的长度比进行参数优化来最大程度地拟合鱼体波曲线[15-17]。
鱼类的身体由多根脊椎骨相互连接而成,采用尾鳍推进的鱼类在游动时主要通过脊椎曲线的波动带动尾鳍摆动来产生推进力,仿生机器鱼通过模仿鱼类的推进机理实现游动,国内外很多学者致力于此方面研究,并取得了丰硕的成果[18-22]。
鱼类游动具有极高的推进效率,在研究鱼类的运动学模型时,如何借鉴鱼类运动得到一种高效的推进模式是十分有意义的。文献[23]提出了一种将描述鱼体稳定游动的周期性运动和描述鱼体身体形状改变的非周期性运动相分离的方法,来对鱼的躯体运动进行运动学建模。文献[24]提出了多坐标系转换的运动学模型,为基于波动鳍推进模式的多鳍推进控制系统设计方案为水下机器人的仿生设计提供了一个新的思路和选择,但仅能对理想的仿鱼波动面进行运动描述。
一些学者对非鲹科鱼类进行研究,通过观察其形态学特点,对运动学特性进行观测,并建立了相应的运动学模型[25-27]。
1.2 基于动力学模型的方法
由于鱼类在水中的游动涉及鱼体的运动学和复杂的水动力学,在现有的水动力学基础上很难通过解析的方法建立精确的数学模型,因此,现阶段仿生机器鱼的运动控制皆建立在简化的水动力学模型之上。
对鱼类游动时的水动力学研究,国外学者Wu[28]、Lighthill[29-30]和 Videler[31]分别提出了“二维波动板理论”、“大摆幅细长体理论”和“薄体理论”,为仿生机器鱼的动力学研究奠定了基础。20世纪80年代中后期,中国科学技术大学的童秉纲和程建宇博士采用半解析-半数值的方法,提出了三维波动板理论,得到了国际上鱼类生物力学研究群体的广泛运用和认同[32-33]。
通过分析鱼体在纵向、横向和沉浮方向的力学分析和计算,建立仿生机器鱼游动时的水动力学模型,采用几何非线性方法、在线反馈跟踪或离线运动规划等方法,对机器鱼的运动控制策略进行研究,仍是主要的研究方法。国内外在此方面的动力学建模研究成果颇丰[34-44]。
在水动力学理论的改进和优化方面,文献[45]和文献[46]通过运用改进了的“大振幅细长体理论”和“二维波动板理论”,对仿生机器鱼的动力学模型进行了分析研究。
1.3 仿神经元网络控制的方法
基于仿神经元网络的仿生机器鱼控制方法,是近年来新出现的一种运动控制方法,模仿动物的运动控制机理,以中枢模式发生器(central pattern generator,CPG)作为底层运动控制器,可以应用于机器人步态的产生。
瑞士的Ijspeert等一直致力于基于生物CPG原理的运动控制方法研究,并成功地将CPG原理的运动控制方法应用到了两栖蛇形机器人上[47]。
由于基于CPG的运动控制方法与传统的运动控制方法相比,有着无可比拟的优越性,并且CPG模型并不统一,使得基于CPG的仿生机器鱼运动控制成为研究的热点之一,国内外许多学者在这方面做了大量研究[48-55]。
CPG模型一般都含有高度非线性的环节,这给CPG的理论和应用研究带来许多困难。在CPG模型的改进和优化方面,文献[56]提出了一种进化优化的CPG结构,通过控制仿生机器鱼的关节摆角来产生类似鱼类的游动,并用量子进化算法来优化产生类似鱼类游动的参数。为了克服开环CPG只在参考信号作用时才能同步的局限性,文献[57]提出了一种新的单层CPG方法,其中CPG和物理层合并为一个单层,以确保在存在外部干扰的情况下物理执行器的同步性,并成功地将该策略运用到仿生机器龟的控制上。为使CPG的控制输出信号的参数达到最优,文献[58]提出了一种基于中枢模式发生器的粒子群算法,用以产生有节律的仿生机器鱼运动控制信号。
2 仿生机器鱼的运动控制方法
常见的仿生机器鱼运动控制方法有基于杆系结构的鱼体波曲线拟合法、简单的正弦控制器方法和基于中枢模式发生器的运动控制方法。下面就这3种常见的运动控制方法的基本原理、优缺点等进行讨论。
2.1 基于杆系结构的鱼体波曲线拟合控制方法
基于杆系结构的鱼体波曲线拟合方法从本质上说是一种基于运动学的方法。它将仿生机器鱼身体的摆动部分视为一个由铰链相连的多连杆机构,通过调节鱼体的连杆机构在运动过程中的相对位置来拟合鱼体波曲线[59]。基于杆系结构的鱼体波曲线拟合如图1所示。拟合过程中保证每一摆动时刻每一连杆的端点都落在鱼体波理论曲线上即可,如图1对应的关节角取为 φ1、φ2、φ3、φ4。
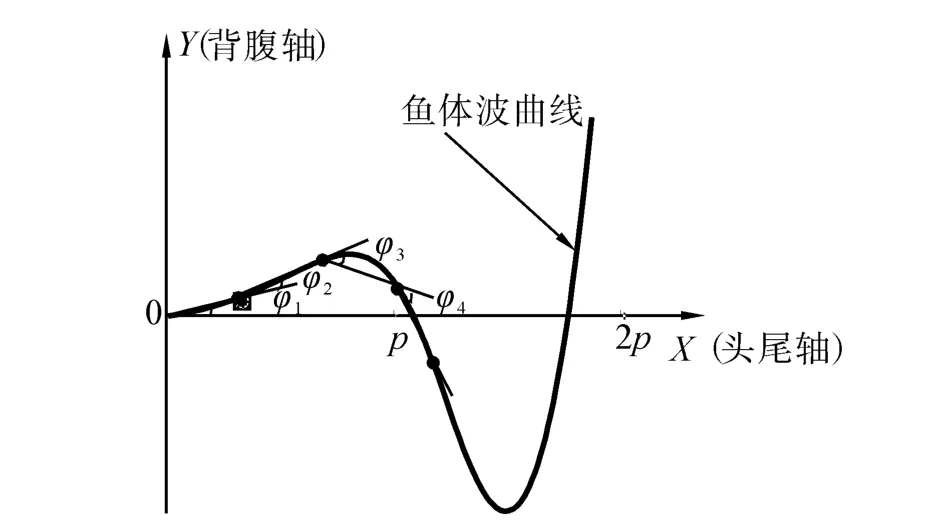
图1 基于杆系结构的鱼体波曲线拟合Fig.1 Curve fitting of fish body wave based on the structure of bar system
鲹科鱼类的鱼体波曲线可看作是鱼体波幅包络线和正弦曲线的合成,它开始于鱼体的惯性中心,延伸至尾柄,其曲线方程可表示为[59]

式中:ybody是鱼体的横向位移,x是鱼体的轴向位移,c1是鱼体波波幅包络线的一次项系数,c2是鱼体波波幅包络线的二次项系数,k是波长倍数(k=2π/λ),λ是鱼体波的波长,ω是鱼体波频率(ω =2πf=2π/T)。
基于杆系结构的鱼体波曲线拟合的运动学模型比较简单,只要选择合适的参数集就能实现仿生机器鱼游动步态的产生。但鱼体波曲线方程的表征范围和曲线柔性较为有限,对不同种类、尺寸、外形的仿生机器鱼具有不同的运动参数集,因此要优化仿生机器鱼的控制性能和游动效率比较困难。同时,由于曲线的柔性有限,使得曲线拟合法对参数突变的适应性方面较差。此外,鱼体波拟合需要大量的迭代运算,拟合出的关节摆角需要存储于仿生机器鱼的内部存储器内,受存储容量的限制,仿生机器鱼不可能具有无限多的游动步态,因此限制了仿生机器鱼游动的机动性和灵活性。
鱼体波曲线方程相应的优化和改进方案:针对波动方程表征范围较为有限的缺点,在保留曲线方程特征参数的同时,引入波长倍数k相对于x的二次增益项,从而可以实现更多的身体波曲线,增加仿生机器鱼运动的机动性和灵活性[60]。文献[61]通过构造惩罚函数将有约束问题转化为无约束优化问题,实现机器鱼多关节机构尺寸的参数优化,减小了仿生机器鱼实际中心线与理论中心线之间的误差,最大限度地体现了理想鱼体波曲线的水动力学优越性。
2.2 正弦控制器运动控制方法
正弦控制器运动控制方法[62-63]的基本原理是:使用简单的正弦控制器驱动仿生机器鱼的多个串联关节,通过使前面关节的相位超前于后面关节的相位来产生推进行波。基于正弦控制器的运动控制方法从本质上来说也是一种基于运动学的方法。用方程可以表述为

式中:φlag为相邻关节间的相位滞后角,A为每个关节的最大角偏移量,ψ为角向偏移量。
正弦控制器方法模型、控制思想简单,可以在线产生仿生机器鱼的游动步态,通过对控制参数的修改可以产生多样化的游动步态。但显然采用正弦控制器时频率和幅值的突变会引起摆角的突变,因此无法实现平滑自然的速度调节。
文献[62]设计了由一系列连杆结构组成的仿生鱼鳍,凭借一个特别设计的条带,使每个连杆能够相对于相邻的连杆转动或滑动,通过正弦控制器控制连杆机构的摆动,用产生的正弦曲线来拟合鱼鳍的波动,并将正弦波控制器方法成功地应用到了装有仿生波动鳍的浮力管的运动控制上。
2.3 基于中枢模式发生器原理的运动控制方法
近年来,基于中枢模式发生器的方法越来越多地被用于各种类型的机器人及运动模式上。CPG是一种仿生方法,它是由中间神经元构成的局部振荡网络,通过神经元之间的相互抑制实现自激振荡,产生具有稳定相位互锁关系的多路(或单路)周期信号,控制肢体或躯体相关部位的节律运动[64]。CPG网络作为一种节律性运动控制机制,主要特点为[65]:
1)可以在缺乏高层命令和外部反馈的情况下自动产生稳定的节律信号,而反馈信号或高层命令又可以对CPG的行为进行调节;
2)在高层命令的调节下,通过相位锁定,可以产生多种稳定、自然的相位关系,实现不同的运动模式;
3)易于和输入信号或物理系统耦合,使节律行为在整个系统中传导;
4)可对外界刺激产生反射,从而改变运动状态,具有很强的适应性和鲁棒性。
这些特点非常适合于机器人的运动控制,因此,CPG常被作为机器人运动的底层控制器。鱼类学研究证明,鱼类的鳍和身体的运动都是由其中枢神经系统的周期性活动所引起的,因此引入了CPG控制机制用于产生模块化机器鱼的游动步态。
2.3.1 Amari-Hopfield神经元振荡器的CPG模型
基于Amari-Hopfield神经元的振荡器模型[66]是一类应用比较普遍、具有稳定极限环的CPG模型,它由兴奋和抑制2类神经元组成,神经元之间存在着兴奋性和抑制性连接。要产生类似鱼类的游动步态,可分别对仿生机器鱼的每个关节建立一个CPG的神经元模型,它同样包括兴奋和抑制2类神经元以及神经元之间的兴奋抑制连接。文献[67]通过对简单的正弦振荡器模型引入一个非线性函数项f(x,y)=ωx-x/A(x2+y2)来稳定振荡器的能量,再引入带连接权值的耦合项得到多关节耦合CPG模型,通过调节连接权值产生关节间的相位差形成多关节协调运动。多关节CPG耦合模型如下:
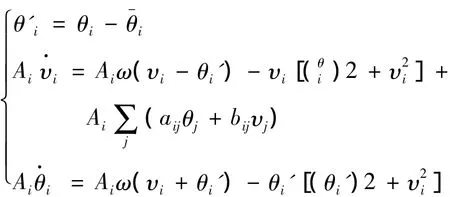
式中:T表示时间步长,θi表示第i个关节的期望摆角,θ-i表示迭加在第i个关节摆动的中心位置的偏移量,aij和bij均为第i个关节和第j个关节之间的连接权值(第j个关节对i个关节影响的权值)。对于尾部由3个关节组成的仿生机器鱼,其基于Amari-Hopfield神经元振荡器的CPG控制网络如图2。

图2 三关节仿生机器鱼CPG控制网络Fig.2 The CPG control network of three joint biomimetic robotic fish
基于Amari-Hopfield神经元振荡器的CPG模型通过采用最近相邻耦合关系,从而简化了系统的复杂程度。模型中的参数意义明确且相对独立,使其易于调节。
通过改变连接权值aij和bij可以调节各关节之间摆动的超前滞后关系,形成稳定的鱼体波,根据鱼类游动的特点可以设定振幅、频率、摆动偏移量等参数来产生合适的鱼体波。此外,文献[68]基于Amari-Hopfield神经元振荡器构建了CPG控制模型,证明了此模型具有稳定的极限环,并成功地将此CPG模型应用于一种带胸鳍的仿生机器鱼控制上。
2.3.2 递归振荡器模型
Matsuoka提出的神经振荡器模型[69]是机器人领域使用最为广泛的递归振荡器模型,它是由日本九州工业大学的Matsuoka教授融合半层振荡器概念而构建的。
在没有传感器信息输入的情况下,Matsuoka神经振荡器模型只能产生对称的振荡输出,从而限制了其在机器人领域的应用。为了使振荡器产生不对称输入,Kimura[70]在 Matsuoka振荡器模型的基础上进行了一定的改进,该振荡器模型采用2个相互抑制的神经元组成振荡器,分别对应于动物的屈肌和伸肌控制神经元,通过为屈肌神经元和伸肌神经元提供不同高层输入方式,使振荡器产生不对称的输出。因此可以用Kimura神经元振荡器模型来产生机器鱼的游动步态。Kimura神经元振荡器模型如图3所示。

图3 Kimura神经振荡器模型Fig.3 Kimura neural oscillator model
可以用式(1)微分方程来描述Kimura神经振荡器的动态特性,它们皆具有稳定的极限环。,式(1)的表达式如下:
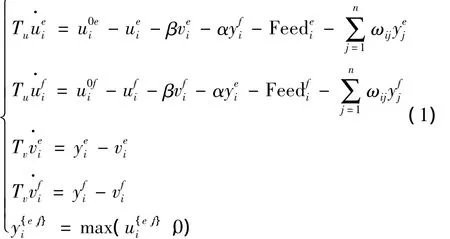
式中:Tu和Tv为时间常数;分别为第i个神经振荡器的伸肌和屈肌神经元的内部状态表示神经元疲劳(自抑制)程度;为神经元输出;β代表自抑制对神经元内部状态的影响程度;α是伸肌神经元和屈肌神经元之间的连接权重;ωij表示神经振荡器j对i的连接权重;示外部反馈输入;表示来自高层的激励输入;yi为振荡器输出,可以作为关节角度或者力矩控制信号
改进的Matsuoka神经元振荡器数学模型相对简单,可以较好地表达出CPG的生物学特性。仿生机器鱼的每个关节可由一个Kimura神经振荡器进行控制,振荡器的输出作为关节的目标角度,通过调整神经振荡器之间的耦合关系和连接权重可协调多个关节的运动,从而产生类似鱼类的游动。文献[53]设计了基于Kimura神经振荡器的CPG模型,根据CPG模型参数与反馈输入之间的关系,设计了机器鱼俯仰和转弯反馈控制方法,通过利用机器鱼反馈的信息来自主调节CPG参数,达到控制胸鳍运动模式的目的。文献[71]基于改进的Matsuoka振荡器CPG模型,研究了用CPG模型来产生机器鱼的目标关节摆角,通过推进器的协调控制,实现机器鱼多样化的游动步态。
2.3.3 相位振荡器模型
瑞士科学家Ijspeert在Cohen振荡器模型的基础上,根据蝾螈运动过程中身体的波动特征,提出一种新的用于机器人运动控制的CPG模型。该模型是一个由耦合非线性振幅控制相位振荡器构成系统。Ijspeert模型不同于其他的CPG模型,它仅是在抽象上对生物运动过程的模拟,Ijspeert模型的极限环行为具有解析解,并且这个解能够清楚地表达用来控制参数的振幅、频率和相位滞后等物理量[72-73]。Ijspeert振荡器模型可由如下方程组描述:
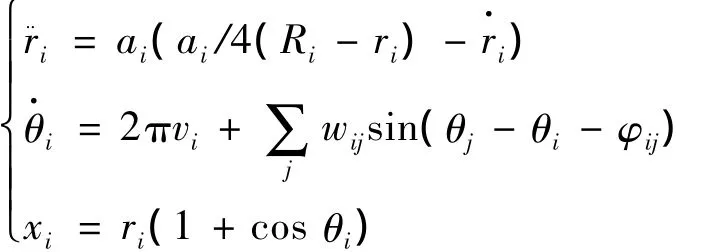
式中:θi表示第i个振荡器的相位;vi表示固有频率;wij表示耦合权重;φij表示振荡器间的相位关系;ri表示第i个振荡器的幅值;Ri表示固有幅值;ai表示幅值收敛速度;xi表示第i个振荡器的输出。Ijspeert成功地将此振荡器模型应用于仿生蝾螈机器人上。
Ijspeert振荡器模型相比Cohen的相位振荡器模型,其相位耦合关系明显,并且添加了输出函数,状态变量较少、计算量小。
文献[49]提出了一种和Ijspeert模型相似但拓扑结构不同的振荡器模型作为控制器,通过改变振荡器的频率、振幅、相位偏移等参数,使机器鱼产生期望的游动或爬行状态。最后,Crespi等用仿真和实验证明了CPG控制方法有利于鳍的在线游动步态生成,并且在参数突变时,CPG控制方法可以实现平滑的适应和过渡。
图4给出了当控制参数变化时,3种仿生机器鱼运动控制方法的相应响应曲线[71]。
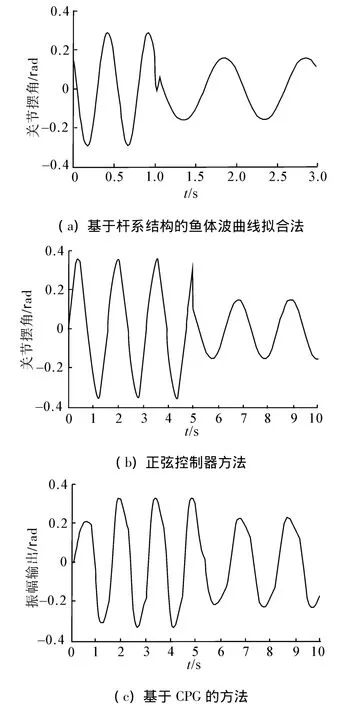
图4 3种仿生机器鱼运动控制方法对控制参数变化的响应Fig.4 Three motion control methods of biomimetic robotic fish in response to the variation of control parameter
如图4(a)所示,基于杆系结构的鱼体波曲线拟合法在t=1 s时控制参数发生突变,仿生机器鱼的关节摆角经过0.1 s的不平滑的调节过程过渡到了新值,而正弦控制器方法在t=5 s控制参数发生突变后,仿生机器鱼的关节摆角直接突变到了新值,如图4(b)所示。图4(c)中,当t=5 s时神经振荡器的激励输入和时间常数发生改变,CPG输出信号的频率和幅值并没有产生不连续的变化,而是渐近平滑地收敛到了新值。
与前2种方法相比,基于CPG的运动控制方法由于在线步态生成和模型的非线性特性而具有一系列优点:1)对参数变化引起的频率、幅值突变,各关节的摆动可以平滑地适应和过渡,从而实现平滑自然的速度调节;2)对环境中的扰动具有很好的适应性;3)可产生灵活多样的游动步态。基于CPG的运动控制研究尚处于起步阶段,CPG模型一般较为复杂、含有高度非线性环节,这给CPG模型的研究带来许多困难和应用上的不便。目前CPG模型较不统一,要得到更加稳定灵活的游动步态,并将理论成果转化为实际的工程方法还需要更加深入的研究和探索。
3 结束语
本文对几种常见的仿生机器鱼运动控制方法进行了讨论,并分析了各自的优缺点,对于从事这方面研究的人员具有一定的参考价值。由于CPG控制方法本身的稳定性、可靠性以及无需节律信号输入等优点,使基于CPG的运动控制方法明显优于基于杆系结构的鱼体波曲线拟合法和正弦控制器方法,因此基于CPG模型的方法将成为未来主流的运动控制方法。
[1]TRIANTAFYLLOU M S,TRIANTAFYLLOU G S.An efficient swimming machine[J].Scientific American,1995,272(3):40-46.
[2]蒋新松.未来机器人技术发展方向的探讨[J].机器人,1996,18(5):285-291.JIANG Xinsong.An overview of the prospects of robot technologies[J].Robot,1996,18(5):285-291.
[3]李志成.仿生机器鱼建模与软硬件实现的研究[D].哈尔滨:哈尔滨工业大学,2007:1-5.LI Zhicheng.The software and hardware design and dynamic research on the robot fish[D].Harbin:Harbin Institute of Technology,2007:1-5.
[4]张芳,林良明.多移动机器人协调系统体系结构与相关问题[J].机器人,2001,23(6):554-558.ZHANG Fang,LIN Liangming.Architecture and related problems concerning cooperative mobile robot system[J].Robot,2001,23(6):554-558.
[5]HU H,LIU J,DUKES I,et al.Design of 3D swim patterns for autonomous robotic fish[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.Beijing,China,2006:2406-2411.
[6]MENZEL P,ALUISIO F D.Robo sapiens:evolution of a new species[M].Cambridge:Material World Book,2002:80-81.
[7]喻俊志,陈尔奎,王硕,等.仿生机器鱼研究的进展与分析[J].控制理论与应用,2003,20(4):485-491.YU Junzhi,CHEN Erkui,WANG Shuo,et al.Research evolution and analysis of biomimetic robot fish[J].Control Theory& Applications,2003,20(4):485-491.
[8]梁建宏,王田苗,魏洪兴.水下仿生机器鱼的研究进展I—鱼类推进机理[J].机器人,2002,24(2):107-111.LIANG Jianhong,WANG Tianmiao,WEI Hongxing.Research and development of underwater robofish I—Fish propulsion mechanism[J].Robot,2002,24(2):107-111.
[9]梁建宏,王田苗,魏洪兴,等.水下仿生机器鱼的研究进展II—小型实验机器鱼的研制[J].机器人,2002,24(3):234-238.LIANG Jianhong,WANG Tianmiao,WEI Hongxing,et al.Research and development of underwater robofish II—Development of a small experimental robofish[J].Robot,2002,24(3):234-238.
[10]梁建宏,王田苗,魏洪兴,等.水下仿生机器鱼的研究进展III—水动力学实验研究[J].机器人,2002,24(4):304-308.LIANG Jianhong,WANG Tianmiao,WEI Hongxing,et al.Underwater robofish research progress III-Hydrodynamics experiments of robofish[J].Robot,2002,24(4):304-308.
[11]王扬威,王振龙,李健.仿生机器鱼研究进展及发展趋势[J].机械设计与研究,2011,27(2):22-25.WANG Yangwei,WANG Zhenlong,LI Jian.Research development and tendency of biomimetic robot fish[J].Machine Design and Research,2011,27(2):22-25.
[12]魏清平,王硕,谭民,等.仿生机器鱼研究的进展与分析[J].系统科学与数学,2012,32(10):1274-1286.WEI Qingping,WANG Shuo,TAN Ming,et al.Research development and analysis of biomimetic robotic fish[J].Journal of Systems Science and Mathematical Sciences,2012,32(10):1274-1286.
[13]LIGHTILL M J.Note on the swimming of slender fish[J].Journal of Fluids Mechanics,1960,9:305-317.
[14]BARRETT D,GROSENBAUGH M,TRIANTAFYLLOU M.The optimal control of a flexible hull robotic undersea vehicle propelled by an oscillating foil[C]//Proceedings of the Symposium on Autonomous Underwater Vehicle Technology.Monterey,Canada,1996:1-9.
[15]YU J,WANG L,TAN M.A framework for biomimetic robot fish’s design and its realization[C]//Proceedings of the 2005 American Control Conference.Portland,USA.2005:1593-1598.
[16]LIU J,HU H.A methodology of modelling fish-like swim patterns for robotic fish[C]//Proceedings of the IEEE International Conference on Mechatronics and Automation.Harbin,China,2007:1316-1321.
[17]YU J,WANG L,TAN M.Geometric optimization of relative link lengths for biomimetic robotic fish[C]//Proceedings of the IEEE Transactions on Robotics.Edmonton,Canada,2007,23:382-386.
[18]YAMAMOTO I,TERADA Y,NAGAMATU T,et al.Propulsion system with flexible/rigid oscillating fin[J].IEEE Journal of Ocean Engineering,1995,20(1):23-30.
[19]MACIVER M A,FONTAINE E,BURDICK J W.Designing future underwater vehicles:principles and mechanisms of the weakly electric fish[J].IEEE Journal of O-cean Engineering,2003,29(3):651-659.
[20]WANG L,CAO Z,TAN M,et al.Mechanical design and implementation of a new biomimetic robot fish[J].High Technology Letters,2007,13(4):343-349.
[21]朱豪华,付庄,赵言正.柔性机器鱼的仿生运动拟合控制研究[J].机电一体化,2006,12(3):35-38.ZHU Haohua,FU Zhuang,ZHAO Yanzheng.Motion fit of the biotic robofish with flexible tail[J].Mechatronics,2006,12(3):35-38.
[22]晁贯良,王卫兵,牛健文,等.D-H坐标系下两栖机器鱼正向运动学分析[J].机械设计与制造,2012,3:211-213.CHAO Guanliang,WANG Weibing,NIU Jianwen,et al.Forward kinematics analysis of amphibious robot-fish in DH coordinates[J].Machinery Design & Manufacture,2012,3:211-213.
[23]ROOT R G,COURTLAND H W,SHEPHERD W,et al.Flapping flexible fish[J].Experiments in Fluids,2007,43(5):141-159.
[24]谢海斌.基于多波动鳍推进的仿生水下机器人设计、建模与控制[D].长沙:国防科技大学,2006:38-68.XIE Haibin.Design,modeling and control of bionic underwater vehicle propelled by multiple undulatory fins[D].Changsha:National University of Defense Technology,2006:38-68.
[25]蒋小勤,杜德锋,周骏.行波推进仿生机器鱼[J].海军工程大学学报,2007,19(5):1-5.JIANG Xiaoqin,DU Defeng,ZHOU Jun.Fish robot swimming by long fin traveling wave[J].Journal of Naval University of Engineering,2007,19(5):1-5.
[26]杨少波,韩小云,张代兵,等.一种新型的胸鳍摆动模式推进机器鱼设计与实现[J].机器人,2008,30(6):508-515.YANG Shaobo,HAN Xiaoyun,ZHANG Daibing,et al.Design and development of a new kind of pectoral oscillation Propulsion Robot Fish[J].Robot,2008,30(6):508-515.
[27]胡天江,沈林成,李非,等.仿生波动长鳍运动学建模及算法研究[J].控制理论与应用,2009,26(1):1-7.HU Tianjiang,SHEN Lincheng,LI Fei,et al.Kinematic modeling and motion algorithm for long undulatory fins[J].Control Theory& Applications,2009,26(1):1-7.
[28]WU T Y.Swimming of a waving plate[J].Fluid Mechanics,1961,10:326-344.
[29]LIGHTHILL M J.Aquatic animal propulsion of high hydromechanical efficiency[J].Fluid Mechanics,1970,44:265-301.
[30]LIGHTHIN M J.Large-amplitude elongated-body theory of fish locomotion[C]//Proceedings of the Royal Society of London:Series B.London,1971:125-138.
[31]VIDELER J J,HESS F.Fast continuous swimming of two pelagic predators,saithe and mackerel:a Kinematic Anal-ysis[J].Journal of Experimental Biology,1984,109:209-228.
[32]童秉纲,庄礼贤.描述鱼类波状游动的流体力学模型及其应用[J].自然杂志,1998,20(1):1-7.TONG Binggang,ZHUANG Lixian.Hydrodynamic model for fish’s undulatory motion and its applications[J].Nature,1998,20(1):1-7.
[33]童秉纲.鱼类波状游动的推进机制[J].力学与实践,2000,22(3):69-74.TONG Binggang.Discussions on propulsion mechanism of fish undulatory swimming[J].Mechanics in Engineering,2000,22(3):69-74.
[34]KELLY S D,MASON R J,ANHALT C T,et al.Modelling and experimental investigation of carangiform locomotion for control[C]//Proceedings of the 1998 American Control Conference.Philadelphia, USA,1998:1271-1276.
[35]MCISAAC K A,OSTROWSKI J P.Motion planning for anguilliform locomotion[C]//Proceedings of the IEEE Transactions on Robotics and Automation.Washington,USA,2003,19(4):637-652.
[36]SAIMEK S,LI P Y.Motion planning and control of a swimming machine[J].International Journal of Robotics Research,2004,23(1):27-54.
[37]MORGANSEN K A,TRIPLETT B I,KLEIN D J.Geometric methods for modeling and control of free-swimming fin-actuated underwater vehicles[J].IEEE Transactions on Robotics,2007,23(6):1184-1199.
[38]陈宏.仿生机器鱼巡游和机动的运动机理研究[D].合肥:中国科学技术大学,2006:36-54.CHEN Hong.Kinematic mechanism research on the swimming and maneuvering of robot fish[D].Hefei:Instrumentation University of Science and Technology of China,2006:36-54.
[39]刘英想,刘军考,陈维山.两关节机器鱼无升潜游动动力学建模与仿真[J].机械工程师,2007,5:19-22.LIU Yingxiang,LIU Junkao,CHEN Weishan.The dynamic mode building and simulation of two-joint fish robot in no up and down movement[J].Mechanical Engineer,2007,5:19-22.
[40]张毅,付文勇,刘洪昌,等.三关节机器鱼的尾部动力学建模与仿真[J].重庆邮电大学学报:自然科学版,2008,20(5):603-609.ZHANG Yi,FU Wenyong,LIU Hongchang,et al.Tail fin dynamic mode building and simulation of three-joint robotic fish[J].Journal of Chongqing University of Posts and Telecommunications:Natural Science Edition,2008,20(5):603-609.
[41]邹克旭,欧白羽,王晨,等.基于滑模方法的机器鱼运动控制[J].机器人技术与应用,2009,4:18-21.ZOU Kexu,OU Baiyu,WANG Chen,et al.Robotic fish motion control based on synovial method[J].Robot Technique and Application,2009,4:18-21.
[42]陈宏,彭建春,徐刚.仿生机器鱼巡游性能的优化研究[J].机床与液压,2010,38(7):52-55.CHEN Hong,PENG Jianchun,XU Gang.Optimization of swimming performance of bionic robot fish[J].Machine Tool& Hydraulics,2010,38(7):52-55.
[43]肖洋,蒋玉莲.三关节机器鱼的动力学建模及其关键运动参数的研究[J].西南民族大学学报:自然科学版,2011,37(5):247-250.XIAO Yang,JIANG Yulian.The research of dynamics model and key motion parameters for three joint robotic fish[J].Journal of Southwest University for Nationalities:Natural Science Edition,2011,37(5):247-250.
[44]万宏,王超,夏丹,等.机器鱼自主游动中变形体耦合动力学的数值研究[J].机械工程学报,2012,48(15):32-37.WAN Hong,WANG Chao,XIA Dan,et al.Numerical study on the dynamics of freely self-propelled robotic fish[J].Journal of Mechanical Engineering,2012,48(15):32-37.
[45]LIU Q.Research on dynamics performance of robotic fish based on ADAMS[C]//Proceedings of International Conference on Measuring Technology and Mechatronics Automation(ICMTMA).Changsha,China,2010,3:61-65.
[46]俞经虎,竺长安,朱家祥,等.仿生机器鱼尾鳍的动力学研究[J].系统仿真学报,2005,17(4):947-953.YU Jinghu,ZHU Changan,ZHU Jiaxiang,et al.Research of Steady Control of Tail Fin of Robotic-fish[J].Journal of System Simulation,2005,17(4):947-953.
[47]CRESPI A,BADERTSCHER A,GUIGNARD A,et al.AmphiBot I:an amphibious snake-like robot[J].Robotics and Autonomous Systems,2005,50:163-175.
[48]ZHANG D,HU D,SHEN L,et al.Design of an artificial bionic neural network to control fish-robot’s locomotion[J].Neurocomputing,2008,71(4/5/6):648-654.
[49]CRESPI A,LACHAT D,PASQUIER A,et al.Controlling swimming and crawling in a fish robot using a central pattern generator[J].Autonomous Robots,2008,25(1/2):3-13.
[50]REN Q,XU J,GAO W,et al.Generation of robotic fish locomotion through biomimetic learning[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.Vilamoura,Portugal.2012:815-821.
[51]YU J,WANG M,SU Z,et al.Dynamic modeling of a CPG-governed multijoint robotic fish[J].Advanced Robotics,2013,27(4):275-285.
[52]卢振利,马书根,李斌,等.基于循环抑制CPG模型控制的蛇形机器人三维运动[J].自动化学报,2007,33(1):54-58.LU Zhenli,MA Shugen,LI Bin,et al.3-dimensional Locomotion of a snake-like robot controlled by cyclic inhibitory CPG model[J].Acta Automatica Sinica,2007,33(1):54-58.
[53]王龙,谭民,曹志强,等.基于CPG模型的仿生机器鱼运动控制[J].控制理论与应用,2007,24(5):749-755.WANG Long,TAN Min,CAO Zhiqiang,et al.CPG based motion control of biomimetic robotic fish[J].Control Theory& Applications,2007,24(5):749-755.
[54]张代兵,沈林成,胡德文.一种新型人工神经元振荡器的设计与应用[J].机器人,2007,29(6):581-585.ZHANG Daibing,SHEN Lincheng,HU Dewen.Design and application of a novel artificial neural oscillator[J].Robot,2007,29(6):581-585.
[55]汪明,喻俊志,谭民.胸鳍推进型机器鱼的CPG控制及实现[J].机器人,2010,32(2):248-255.WANG Ming,YU Junzhi,TAN min.Central pattern generator based control and implementation for a pectoral-fin propelled robotic fish[J].Robot,2010,32(2):248-255.
[56]NA K I,PARK C S,JEONG I B,et al.Locomotion generator for robotic fish using an evolutionary optimized central pattern generator[C]//Proceedings of the IEEE International Conference on Robotics and Biomimetics(ROBIO).Tianjin,China,2010:1069-1074.
[57]SEO K,CHUNG S J,SLOTINE J J E.CPG-based control of a turtle-like underwater vehicle[J].Autonomous Robots,2010,28(3):247-269.
[58]JEONG I B,PARK C S,NA K I,et al.Particle swarm optimization-based central patter generator for robotic fish locomotion[C]//Proceedings of the IEEE Congress on Evolutionary Computation(CEC).New Orleans,USA.2011:152-157.
[59]YU J,TAN M,WANG S,et al.Development of a biomimetic robotic fish and its control algorithm[J].IEEE Transactions on Systems,Man and Cybernetics:Part Bs,2004,34(4):1798-1810.
[60]YU J,WANG L,TAN M.A framework for biomimetic robot fish’s design and its realization[C]//The Proceedings of American Control Conference,Portland,USA.2005,3:1593-1598.
[61]谢桂兰.对求解约束优化问题中的变量轮换法的改进[J].机械,2001,28(1):19-21.XIE Guilan.Improvement of cyclic varible method in solving constrained optimization problem[J].Machinery,2001,28(1):19-21.
[62]LOW K H.Mechatronics and buoyancy implementation of robotic fish swimming with modular fin mechanisms[J].Proceedings of the Institution of Mechanical Engineers Part I-Journal of Systems and Control Engineering,2007,221(13):295-309.
[63]TSAKIRIS D P,SFAKIOTAKIS M,MENCIASSI A,et al.Polychaete-like undulatory robotic locomotion[C]//Proceedings of the IEEE International Conference on Robotics and Automation.Barcelona,Spain.2005:3018-3023.
[64]DELCOMYN F.Neural basis for rhythmic behavior in animals[J].Science,1980,210(4469):492-498.
[65]郑浩峻,张秀丽,李铁民,等.基于CPG原理的机器人运动控制方法[J].高技术通讯,2003,7:64-68.ZHENG Haojun,ZHANG Xiuli,LI Tiemin,et al.CPG-based methods for motion control of robot[J].High Technology Letters,2003,7:64-68.
[66]AMARI S.Characteristics of random nets of analog neuronlike elements[J].IEEE Transactions on Systems,Man and Cybernetics,1972,2(5):643-657.
[67]ZHAO W,HU Y,ZHANG L,et al.Design and CPG-based control of biomimetic robotic fish[J].IET Control Theory& Applications,2009,3(3):281-293.
[68]WANG M,YU J,TAN M.Modeling neural control of robotic fish with pectoral fins using a CPG based network[C]//Proceeding of the 48th IEEE Conference on Decision and Control,Shanghai,China,2009:6502-9507.
[69]MATSUOKA K.Mechanisms of frequency and pattern control in the neural rhythm generators[J].Biological Cybernetics,1987,56(5/6):345-353.
[70]FUKUOKA Y,KIMURA H,COHEN A H.Adaptive dynamic walking of a quadruped robot on irregular terrain based on biological concepts[J].International Journal of Robotics Research,2003,22(3/4):187-202.
[71]HU Y,ZHAO W,WANG L,et al.Neural-based control of modular robotic fish with multiple propulsors[C]//Proceedings of 47th IEEE Conference on Decision and Control.Cancun,Mexico.2008:5232-5237.
[72]IJSPEERT A J,CRESPI A,RYCZKO D,et al.From swimming to walking with a salamander robot driven by a spinal cord model[J].Science,2007,315(5817):1416-1420.
[73]CRESPI A,IJSPEERT A J.Online optimization of swimming and crawling in an amphibious snake robot[J].IEEE Transactions on Robotics,2008,24(1):75-87.
猜你喜欢
少儿画王(3-6岁)(2023年4期)2023-06-28 11:01:55
环球时报(2022-07-13)2022-07-13 17:18:39
海洋信息技术与应用(2022年1期)2022-06-05 07:38:24
环球时报(2022-03-14)2022-03-14 18:19:44
哈尔滨轴承(2021年1期)2021-07-21 05:43:16
小学科学(2020年11期)2020-03-04 11:39:00
电影(2018年8期)2018-09-21 08:00:06
探索科学(2017年5期)2017-06-21 21:16:16
金色少年(奇趣科普)(2016年8期)2016-09-21 02:04:58
小猕猴智力画刊(2015年4期)2015-04-28 23:55:53