
一种改进的多点融合非均匀校正技术
2014-11-26 10:51曹伟董书莉李春梅
中国空间科学技术 2014年3期
曹伟 董书莉 李春梅
(北京空间机电研究所,北京100094)
1 引言
理想情况下,探测器受均匀辐射时,输出幅度完全一致,而实际上,由于制作器件的半导体材料不均匀(杂质浓度、晶体缺陷、内部结构的不均匀性等),及掩膜误差、工艺条件等影响,使得其输出幅度并不相同,这就是所谓响应非均匀性。实际中,引起相机系统的非均匀性因素是多方面的,主要有光学系统和棱镜材料对透过率的非均匀性,探测单元光谱响应率的非均匀性,读出电路与探测器耦合的非均匀性等[1]。而相机系统的非均匀性校正算法是将相对不一致性校正系数作用于原始图像,消除这种由于像元的响应不一致引起的条纹效应,将这些条纹的影响降低到最小程度或彻底去除[2],从而对整个相机系统的非均匀性进行校正。
在非均匀校正方面,针对图像传感器光电响应呈线性或者非线性的特点,国内外已有了较为深入的研究,如一点校正算法、二点校正算法、相邻像元算法等多种校正方法[3-5],但是对于定标过程中探测器与目标光源之间相对位置的改变而引起的非均匀性现象和问题,目前尚未系统地进行分析和研究。为此,针对宽幅相机在进行非均匀性校正过程中相机镜头与积分球输出口的相对位置发生变换后非均匀性校正精度下降的问题,文章提出了一种改进的融合多点位置的非均匀校正新方法,可以有效地削弱校正系数的敏感程度,降低测试光源不均匀性的影响,对小型宽幅相机具有良好的应用前景。
2 传统的单一位置校正法
2.1 校正原理
CCD像元的输出信号电压与输入光照度的关系为一次线性关系[6]:

式中y为像元的生成电压;x为光照度;η为光响应度,一般与普朗克常数、光照频率、曝光时间、像元的光电转换效率以及有效面积等因素有关;l为暗输出电压,与入射光子数无关。
实际上,由于固定图形噪声和暗电流非均匀性的存在,使得不同像元的η和l均不相同,这就导致CCD在均匀光照条件下,各个像元的输出存在一些差异:

式中yi为第i个像元的生成电压;ηi为第i个像元的光响应度;li为第i个像元的暗输出电压。
联合式(1)、(2),得到

式中ki为增益因子;bi为偏移量。通过非均匀校正算法可以得到ki和bi,从而使得每一个像元在同一均匀光强下的输出信号电压相同。
校正系数的计算通常由以下两个步骤获取:1)通过调节积分球的输入电压以获得不同光照度下的m幅图像;2)利用最小二乘法计算校正系数。
通过比较校正前后图像的非均匀性,可以定量得出校正算法效果,图像的非均匀性计算公式为

式中PN代表像元响应非均匀性;S(DN)为输出DN值的均值;σs(DN)为非均匀分布的均方根噪声;DN为灰度的数字量化值。PN的值越小说明像元间的一致性越好。
2.2 校正误差现象
宽幅相机的镜头和视频电路作为一个整体,在实验室非均匀性校正时,会由于拆装视频电路、验证测试系数等诸多原因而需要改变相机镜头与测试光源之间相对位置。为说明拆装过程中位置发生相对变化对非均匀性校正的影响,设定两者之间的相对位置关系如图1所示。其中提供均匀光源的大口径积分球输出口直径为600mm,相机镜头与积分球输出口距离为450mm并保持不变。

图1 单一位置校正法下相机镜头与积分球的相对位置关系Fig.1 Test system views of single-position calibration
固定宽幅相机本身参数 (如增益、级数和积分时间等)不变,模拟校正系数验证过程,分别拆装视频电路两次后再恢复相机镜头至原位置,为方便说明,依次定义这3次过程为过程A、过程B和过程C,在积分球输出光强为满量程的20%亮度、50%亮度和80%亮度下,采集多幅图像,图像DN值如图2中的曲线所示。相同亮度下3个过程相互间的图像DN差值如图3所示,其中黑色的曲线为过程A与过程C在相同亮度下的图像DN差值,灰色的曲线为过程A与过程B在相同亮度下的图像DN差值。
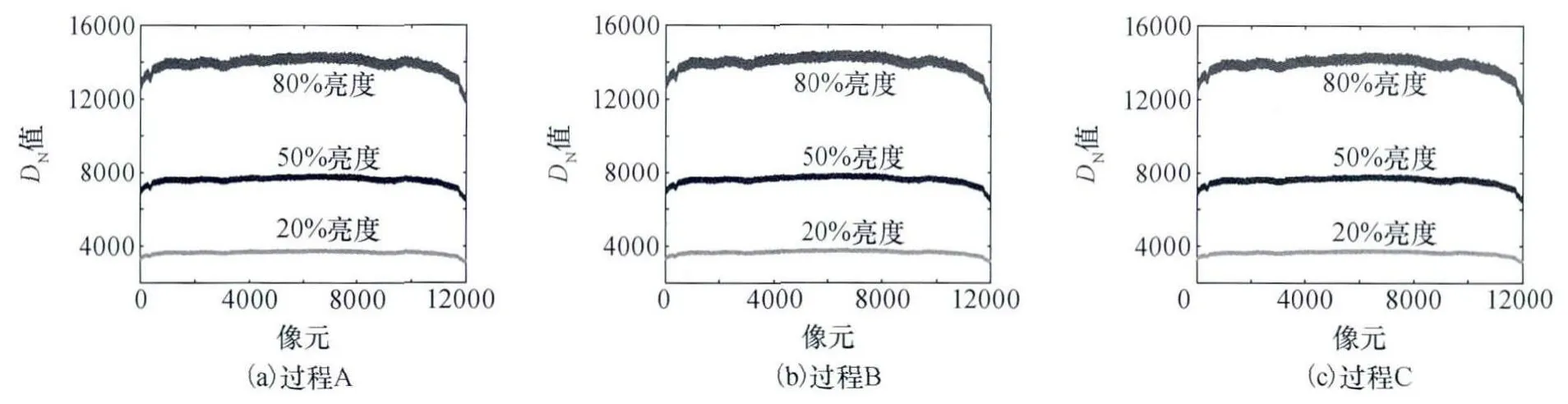
图2 过程A,B和C在不同亮度下的图像Fig.2 DNin process A,B and C at 3light intensities
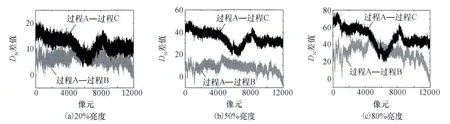
图3 过程A,B和C在相同亮度下的相互图像差值Fig.3 Difference of DNin process A,B and C at the same light intensities
2.3 校正误差原因分析
影响非均匀性校正的因素主要有以下几种:1)宽幅相机自身的参数;2)镜头与积分球输出口的相对位置;3)目标光源的均匀性。
在实验室非均匀性校正过程中,相机镜头与积分球输出口的距离基本恒定,同一台相机参数完全相同,因此可以排除镜面、光路、滤光片、CCD表面玻璃和视频电路等其他因素产生该现象的可能性。
通过比较图2和图3的这6幅图像,可以得到:
1)图2中,相同过程的不同亮度下曲线的形状近似相同,说明亮度变化不会引起图像非均匀性的变化。
2)图3中,在不同过程的相同亮度下上面的曲线与下面的曲线形状有比较大的差异,说明亮度相同,电路的拆装过程变化改变了相机镜头与积分球输出口的相对位置,引起图像非均匀性的变化。这说明不同位置的光强有一定误差,即积分球输出口的光强并非理想均匀。
综上所述可得,积分球输出光源无法达到理想的完全均匀,这就使得在实际非均匀校正过程中会由于电路拆装过程引起的不同位置校正系数的不一致,而导致不同角度、不同位置的校正精度差别比较大,无法达到很好的校正效果。
3 改进的多点融合校正法
理想定标的状况是积分球各个角度、各个球面出射光子能量完全一样,而实际积分球无法达到理想均匀,角均匀性和面均匀性只能达到一定的精度。在积分球输出光强具有一定误差的前提下,采用传统的单一位置校正法对定标图像进行非均匀性校正系数计算势必会带来校正系数对位置的敏感以及系数可靠性的下降。为保证宽幅相机非均匀性校正算法的顺利实现,本文提出了一种改进的多点融合校正法,即为了消除积分球的角均匀性和面均匀性的不足,采用获取多个位置的大量定标图像,融合求取平均值的方法得到校正系数来削弱这种影响,从而提高系数的准确性和校正后图像的均匀性,降低镜头对位置的依赖性。
3.1 多点融合校正原理
选取相机镜头与积分球输出口等距离且相互之间平行的n个位置(n∈[1,2,…]),每个位置的相机视场范围均要求在积分球输出口内。在某个位置下,逐渐调节积分球的输入电压,可以获得不同光照度xk(k=1,…,m)下的m幅图像yi,j(xk)和随机噪声,但大部分随机噪声服从正态分布,其数学期望值为0,通过在时域求平均可以去掉这些随机噪声对非均匀性的校正结果产生的干扰影响。这里假设时域求平均后的图像为zi(xk),即

式中i代表CCD的第i个像元;j代表CCD的第j行;J代表图像的总行数。
对于每个光照度采集的图像,将每个通道所有像元输出信号值的均值作为该通道的期望输出信号值,使每个像元的信号值在校正系数的作用下都向这个期望输出值转换,即

其中:

式中N代表该通道的像元总数。
对于m个不同的光照度,有m个方程,写成矩阵形式为
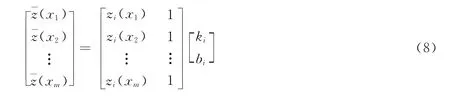
由于给出的定标点的个数多于未知数的个数,所以可以通过最小二乘法来求解校正系数,即

对选取的n个位置,均采集m个相同光源下的图像数据,并带入式(8)变换为

比较式(10)和式(8)不难发现,多点融合校正法在本质上相当于扩充了计算校正系数所使用的数据源,综合考虑了不同位置对校正系数的影响。
多点融合校正具体实施的步骤通常为:
1)选取多个(至少3个)相互平行测试位置,每个位置的相机视场范围均要求在积分球输出口内;
2)每个位置在积分球输出光强为20%,50%和80%亮度下,分别获取多幅(至少30幅)图像数据;
3)采用公式(5)~公式(10)得到多点融合后的校正系数K;
4)生成程序文件,下载至校正电路的系数文件中;
5)对相机视场范围在积分球输出口内的任何位置进行测试,验证系数是否正确。
3.2 试验验证
某宽幅相机视场角为16.44°,内有响应4个不同谱段光强的线阵CCD,在非均匀性校正中,多点融合校正法试验验证装置如图4所示。选取图4中相互平行的X、Y和Z共3个位置(在同一平面上),且每个位置的相机视场范围均在积分球输出口内。每个位置采集30个亮度下校正前后的多幅图像。
随机选取该宽幅相机中的某谱段在积分球亮度为5级时采集的图像进行两种校正方法的对比,如图5所示。由图5可以看出,采用多点融合校正法得到的校正图像比单一位置校正法得到的校正图像更平滑一致,表1提供了图5中3个位置图像采用两种方法校正前后的非均匀性数值。
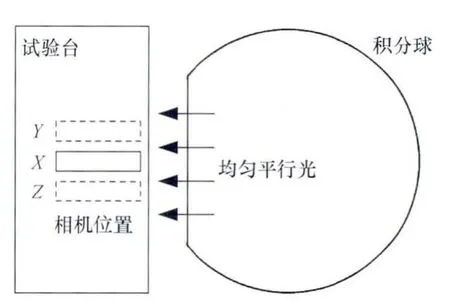
图4 多点融合校正法下相机镜头与积分球的相对位置关系Fig.4 Test system views of multi-position calibration
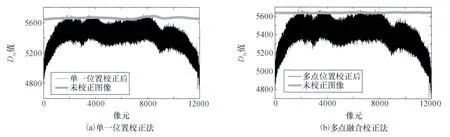
图5 两种方法校正前后的图像Fig.5 DNbefore and after the two calibrations

表1 两种方法校正后的图像非均匀性Tab.1 Non-uniformity comparison of the two calibrations
图5和表1数据表明,改进的多点融合校正法和传统的单一位置校正法均能较大程度改善像元间的非均匀性,但两种方法校正精度却有所不同。采用融合多点位置得到的校正系数相比采用单一位置计算得到的校正系数,校正后像元间均匀性更好,非均匀性校正精度得到大幅提高。
4 结束语
积分球输出口光强不均匀,又无法固定相机与积分球的相对位置导致非均匀校正精度下降。本文在传统的单一位置法进行CCD像元非均匀性校正的基础上,提出一种基于融合多点位置的非均匀性校正新方法,对该方法原理进行了详细的描述,并进行了试验验证。试验结果表明,多点融合的校正方法能够有效地将影响校正精度的位置因素考虑在内,增加校正系数的鲁棒性,提高了非均匀性校正的精度,对小型宽幅相机的非均匀性定标具有指导意义,在后续型号研制中具有较好的应用前景。
[1]陈锐,谈新权.红外图像非均匀性校正技术研究 [J].光电子技术,2001,21(3):189-193.CHEN RUI,TAN XINQUAN.Study on non-uniformity correction of infrared image [J].Optoelectronic Technology,2001,21(3):189-193.
[2]曾湧,张宇烽,徐建艳,等.中巴资源一号卫星02星CCD相机实验室辐射定标算法分析 [J].航天返回与遥感,2005,26(2):41-45.ZENG YONG,ZHANG YUFENG,XU JIANYAN,et al.Analysis of laboratory radiometric calibration algorithm of CBERS-02CCD camera[J].Spacecraft Recovery & Remote Sensing,2005,26(2):41-45.
[3]JAMES R JANESICK.Scientific charge-couple devices[M].WA:SPIE,2001:167-170.
[4]LIU HAITAO,ZHENG Z J JEFFREY.Two-point multi-section nonuniformity correction algorithm of infrared image and implementation of its simulation platform [C]∥Proceedings of the 2006IEEE International Conference on Information Acquisition,Weihai,2006:343-347.
[5]LI TAO,HE MINGYI,LEI NING.TDI CCD non-uniformity correction algorithm [C].4th IEEE Conference on Industrial Electronics and Applications,Xi′an,2009:1483-1487.
[6]程万胜,赵杰,蔡鹤皋.CCD像素响应非均匀的校正方法 [J].光学精密工程,2008,16(2):314-318.CHENG WANSHENG,ZHAO JIE,CAI HEGAO.Correction method for pixel response nonuniformity of CCD [J].Optics and Precision Engineering,2008,16(2):314-318.
猜你喜欢
传感器世界(2022年7期)2022-10-12
航天返回与遥感(2022年4期)2022-09-03
军民两用技术与产品(2022年6期)2022-08-06
湖北农业科学(2022年12期)2022-07-21
航天返回与遥感(2022年1期)2022-03-09
家庭影院技术(2021年6期)2021-07-28
摄影之友(影像视觉)(2019年3期)2019-03-30
数码世界(2018年5期)2018-12-21
新农村(2017年20期)2017-09-28
小天使·六年级语数英综合(2017年5期)2017-05-27
