
基于和声算法的图像配准技术
2014-11-20 08:18:56王正勇何小海
电视技术 2014年7期
张 涛,王正勇,张 影,何小海
(四川大学电子信息学院图像信息研究所,四川成都610064)
美国早在20世纪70年代就开始提出图像配准,后来得到了军方的大力支持与赞助,用于当时的飞行器辅助导航系统、武器投射系统等研究中[1]。在20世纪80年代后,较为成熟的配准技术[2]开始大量应用在其他领域,如目标识别、医学诊断、自动导航、计算机视觉等。在这些领域中,配准技术都是针对其具体的应用背景,与实际情况结合发展出不同的技术。但是不同领域的配准技术之间在理论方法上又有很大的相似性。在某一领域的配准技术很容易移植到其他相关领域进行应用[3]。
目前国内外研究图像配准技术较多的应用领域有:遥感图像处理、红外图像处理、数字地图定位和医学图像处理等领域,侧重研究的方面主要是:复杂场景下的小目标运动跟踪检测、地景的匹配、飞机和导弹的导航及目标定位、基于模板匹配的图像识别等[4]。通常是对图像间存在平移、比例缩放、旋转、几何失真和扭曲等差异而进行配准研究。目前运用较多的图像配准方法[5]主要有:基于灰度相关法、基于变换域法以及基于图像特征法[6]、傅里叶变换法、点映射法。本文对比的算法就是采用基于图像特征点法。
本文运用互信息作为适应度函数,将和声搜索(Harmony Search,HS)[7]算法作为优化策略用于医学图像配准中。通过实验证明,将和声算法用于医学图像配准具有较为理想的结果。
1 和声搜索算法
和声搜索算法(HS)是韩国学者Green ZW等人[8]基于音乐演奏过程提出来的一种新的算法。在演奏过程中,每个乐师都能够发出一个音调,这些音调会形成一个和声向量值,如果这个和声比较美妙,就把它记录下来,便于下次产生更好的和声。和声搜索算法就是把演奏者发出的和声比作优化问题的解向量Yj=(yj1,yj2,…,yj n),评价类比于目标函数f(Yj),音乐家们需要寻找的是由美学评价定义的和声,而研究人员则要找的是由目标函数定义的全局最优解。HS包含了一系列的参数,比如和声记忆库(HM)、和声记忆库取值概率(HMCR)、微调概率(PAR),记忆库的大小(HMS)等,其中HMCR和PAR是主要参数。在和声搜索算法中,和声记忆库初始化存储可行解向量HMS个,HMS决定着记忆库的可行解数量。通过随机产生0~1的随机数random和HMCR相比较,从而决定是在HS里面搜素新解还是在HS之外搜索可能值。目前和声搜索算法应用于许多领域[9],以它为基础的衍生算法也很多[10]。其中和声搜索算法的基本步骤如下[7,11]。
1)设定基本参数并初始化。假设问题最小化,其形式为:minf(x),这里f(x)是目标函数,x是由决策变量xi构成的解向量,每一个决策的值域为Xi,即xi∈Xi,i=1,2,…,N。对于离散 型 变量Xi={xi(1),xi(2),…,xi(K)}。而连续型变量Xi:<Xi<,N为决策变量个数,K为离散型变量可能值的个数。
算法参数有:(1)和声记忆库保存的和声个数HMS;(2)和声记忆库取值概率HMCR;(3)音调微调概率PAR;(4)迭代的最大次数MAX;(5)和声记忆库HM。这些参数均要在第一步中进行初始化。其中记忆库形式为


式中:random表示[0,1]的随机数。然后,新的和声来自和声记忆库HM,要进行音调微调,操作如下

式中:bw为音调微调带宽;PAR为音调微调概率;rand1表示[0,1]上的随机数。
3)更新和声记忆库。若新解优于记忆库中最差的一个解,则用新解替换HM中差的解,得到新的记忆库。
4)判断是否到达结束条件,若满足,则停止迭代,输出最优解;否则,重复步骤2)、步骤3),直到迭代次数达到最大的MAX次为止。
算法步骤流程如图1所示。

图1 和声算法流程
2 互信息
互信息是信息论中的一个概念,它定义在熵的基础上。对于概率分布函数为p(a)的随机变量集A,其熵的定义如下[12]

熵表示的是一个系统的复杂性或不确定性,对灰度图像而言,灰度级别越多,像素灰度值越分散,熵值也就越大;同时,熵也是灰度直方图形状的一个测度。
联合熵H(A,B)是检验随机变量A和B相关性的统计量。对于两个离散的随机变量A和B,它们的边缘概率分布函数分别是pa和pb,联合概率分布函数是pa,b,则随机变量A和B的联合熵定义如下

式中:log的底数决定熵的单位。给定图像A和B,它们的互信息互定义为
式(6)的意义:图像A的不确定性大小减去当B已知时A的不确定性大小,其中I(A,B)的值越大,A,B两幅图像的相似性越高。
3 基于和声搜索算法的图像配准
和声搜索算法应用到图像配准[13]当中去,其主要思路是将求解空间变换参数的优化问题看作音调,所有的音调都有自己的特征,另外还有一个是由参考图像和待配准图像之间的互信息作为适应度,以互信息作为图像相似性准则[14]。每个音调都在解空间中进行搜索,在搜索过程中通过不停地迭代去寻找使互信息量最大的组合,搜索出的互信息最大值的组合是最优解。
具体步骤为:
1)读取参考图像及待配准图像。
2)初始化和声搜索算法的参数,如HM,HMS,HMCR,PAR,MAX等。其中每个和声变量由水平和垂直平移、旋转三个运动量构成的一个三维向量。
3)计算各和声的适应度值,并记录最优和最差适应度值及对应的和声变量。
4)在配准过程中,程序不断检测配准结果图当前适应度值是否优于其前一次的适应度值(即互信息值是否越来越大),如果优于,则替换。
5)条件终止。如果达到最大迭代次数MAX或已经收敛,则终止迭代,得出配准结果图的互信息值;否则返回4),进行下一次迭代。
6)图像配准。根据找到的最优参数组合(即互信息取最大值)后,对待配准图像进行空间变换,得到最终配准结果。
4 实验结果及数据分析
实验选择了3组图像,并把本文提出的方法与基于特征点配准的方法进行了比较。第一组是脊椎侧面图像,如图2a所示。对其进行5°的旋转得到待配准图像,如图2b所示。第二组图像是脊椎正面图像,如图3a所示。对图3a进行5像素的水平平移后得到待配准图像,如图3b所示。第三组是CT医学图像,如图4a所示。对图4a同时进行旋转5°和平移5像素后得到待配准图像,如图4b所示。
依据最大互信息准则分别对原始图像(图2a、图3a、图4a)和待配准图像(图2b、图3b、图4b)进行配准,得到进行基于特征点配准的结果图(图5a、图6a、图7a)和采用本文方法的配准结果图(图5b、图6b、图7b)。
在这3组图片中,本文通过互信息的大小比较配准前和配准后的差异性和相关性,对比其原先数据与结果数据,如表1所示。
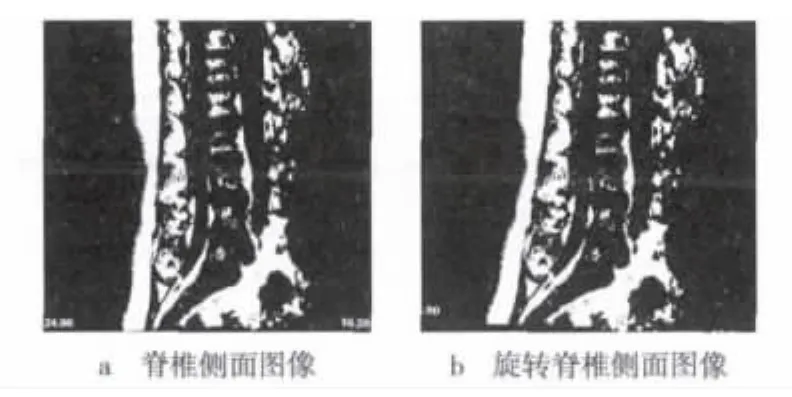
图2 图像1
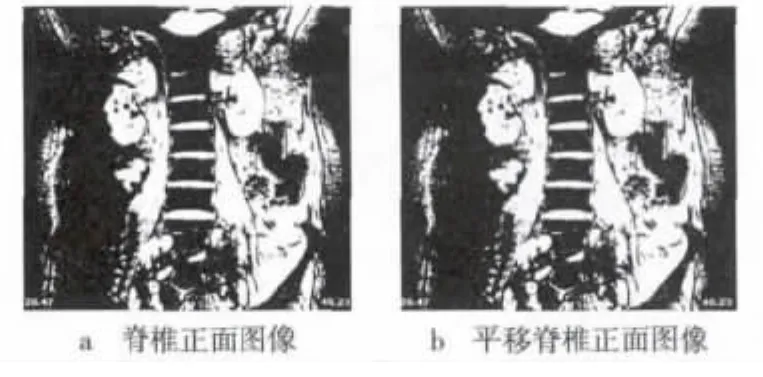
图3 图像2
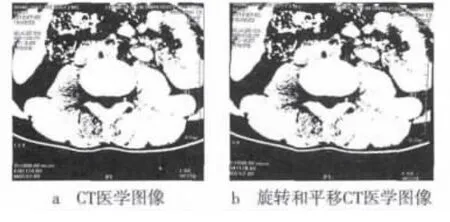
图4 图像3

图5 实验1
图6 实验2

图7 实验3
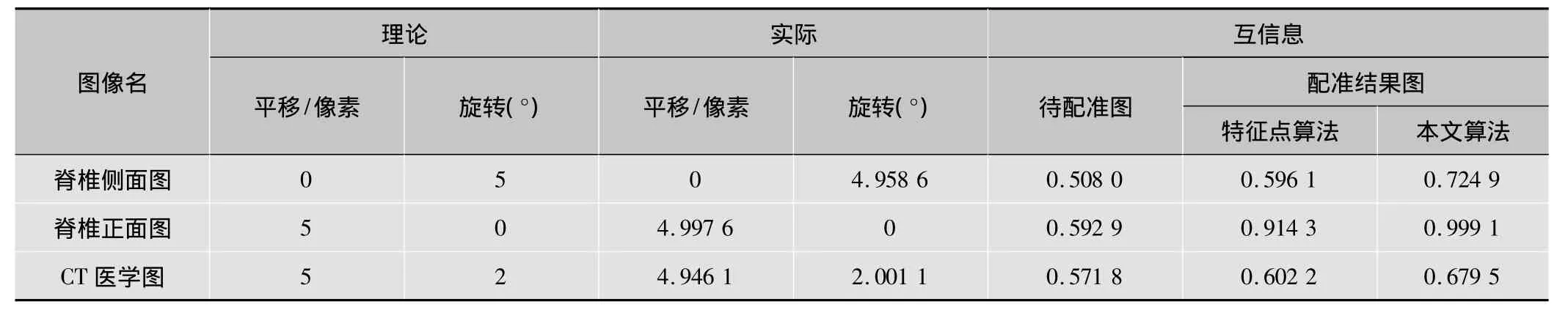
表1 数据对比
从表1可以看出,对实验原始图像进行对应的变化可能产生细微的误差,但总体上可以看出相对于基于特征点算法的图像配准,和声搜索算法无论是对原始图像进行旋转还是平移或者同时旋转和平移,配准结果都达到了理想的效果。
5 结论
本文提出了和声搜索算法在图像配准中的新应用,主要是利用和声搜索算法寻找最佳配准参数,而后通过计算互信息的取值大小,判断是否达到了图像配准的最佳效果。同时,和声搜索算法本身参数较少,作为图像配准的方法之一,较为方便。实验结果也显示出配准较为准确。
[1]夏明革,何友.多传感器图像融合应用评述[J].舰船电子对抗,2002,25(5):38-44.
[2] ZHANG Xiaohong,LEIMing,YANG Dan,et al.Multi-scale curvature product for robust image corner detection curvature scale space[J].Pattern Recognition Letters,2007(28):545-554.
[3]吕海霞.自动图像配准技术研究[D].西安:西北工业大学,2007.
[4]王倩.一种改进的和声搜索算法及其应用[D].上海:华东理工大学,2012.
[5] 王蕾.图像配准技术及应用研究[D].西安:西安电子科技大学,2007.
[6]常丽萍,冀小平,赵梁.分块的基于Harris角点检测的图像配准方法[J].电视技术,2013,37(1):45-47.
[7]雍龙泉.和声搜索算法进展[J].计算机系统应用,2011,20(7):244-248.
[8] GEEM Z,KIM J,LOGANATHANG.A new heuristic optimization algorithm:harmony search[J].Simulation,2001,76(2):60-68.
[9]梁海伶.和声搜索算法在函数优化问题中的应用研究[D].沈阳:东北大学,2009.
[10]张秀杰,李士勇,沈毅,等.和声量子遗传算法在图像配准中的应用[J].系统工程与电子技术,2012,34(10):2152-2156.
[11]陈莹珍,高岳林.多目标自适应和声搜索算法[J].计算机工程与应用,2011,47(31):108-111.
[12]张倩.基于互信息的医学图像配准算法研究[D].济南:山东大学,2009.
[13]魏晓敏.图像配准算法研究与系统设计实现[D].南京:南京航空航天大学,2010.
[14]唐红梅,宋培娇,王霞,等.基于改进粒子群优化算法的互信息图像配准[J].电视技术,2011,35(23):8-10.
猜你喜欢
新航空(2024年3期)2024-06-03 22:25:26
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:42
名作欣赏(2017年25期)2017-11-06 01:40:12
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27 06:31:53
西北工业大学学报(2015年4期)2016-01-19 03:31:47
电测与仪表(2015年15期)2015-04-12 00:43:48
电测与仪表(2015年9期)2015-04-09 11:59:22
河北科技大学学报(2015年5期)2015-03-11 16:16:37
弹箭与制导学报(2015年1期)2015-03-11 15:32:31
中央民族大学学报(自然科学版)(2014年1期)2014-06-11 01:28:38
