基于飞思卡尔MC9S12XS128芯片的智能车刹车系统的研究
2014-11-14 08:25:42曹诚伟刘一君
江苏科技信息 2014年3期
曹诚伟,刘一君
(东南大学成贤学院,江苏 南京 210088)
1 研究背景
1.1 引入刹车系统的由来
为了达到以最快速度跑完不同赛道段的目的,即每段赛道均已可平稳地用最大速度完成,理想情况下在“理想变速分界线”(见图1)速度变为下一赛道段可跑的最大速度,几乎没有“速度浪费”现象的存在。实际情况是赛车整体速度变化必须完成在一个时间区间内,而且在以线性变化、时间最短(“实际线性变速区”距离最短)的同时赛车保持平稳为最佳,这与赛道环境、摄像头等采集设备的前瞻等因素有较大关系,为了减小这些因素的影响,达到人为可控且高效地完成比赛,故引入智能车刹车系统。
1.2 实现刹车的硬件基础
赛车的动力来自电机,而电机是由BTS7960驱动芯片来驱动,主控芯片XS128通过自带的PWM模块输出端口输出2路PWM波,通过2片BTS7960驱动芯片后输出控制电机正反转的。如图2所示,PP1为控制正转的PWM波,PP3为控制反转的PWM波。以PP3的占空比来实现反转的输出量,从而实现刹车的功能。
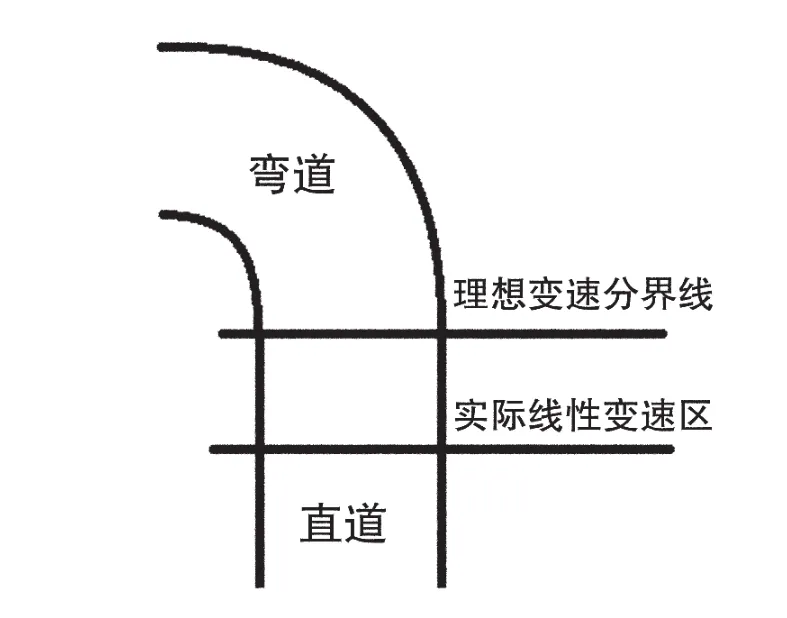
图1 赛道变化与刹车系统的联系
1.3 实现刹车的软件基础
本文是基于摄像头组别的智能车,摄像头采集的数据是智能车进行控制并判断的关键输入,通过软件滤波和二值化后得到的二值图像数据是当前以及前方赛道类别的重要判断依据,同时也是速度控制的重要参考指标。对二值化图像数据的处理采用区分赛道的软件算法,进而得出当前以及前方的赛道类型,同时给出该赛道相应速度的预期指标。结合编码器采集的当前车速,通过算法得出当前PWM所需的输出值。赛道分类及相应赛道变化时所预期的速度变化如表1所示。
2 研究内容
2.1 1路PWM输出控制
当只有1路PWM波输出时,只能单向控制驱动轮转速的快慢,降速控制完全只能依靠地面摩擦力等人为不可控、不确定因素来进行控制,无法对赛车的整个运行状态进行平稳有效地控制,不能满足比赛竞速的目的。
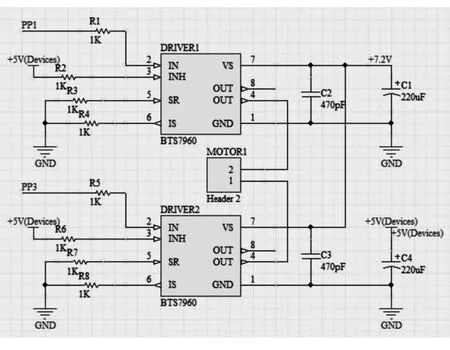
图2 电机驱动电路

表1 赛道分类及期望速度
2.2 2路PWM输出控制
2路PWM波输出可对驱动轮进行正反转控制,故可有效地实现对赛车速度进行平稳有效地控制。
由于车模结构的特殊性,飞思卡尔智能车实现刹车可以由电机抱死或电机反转2种方法来实现。由于电机是由全H桥电路驱动控制,故PWM波周期应适当,防止刹车时驱动芯片过热保护而停止工作,并在驱动芯片和主控芯片之间加缓冲芯片,防止大电流回流烧坏主控芯片。
2.2.1 电机抱死刹车
电机抱死刹车是通过输入大小相等的2路PWM波使电机停转,通过电机内部磁场将电机转轴卡死,外力无法带动转轴致使车驱动轮停转。此种方法的优点是易于精确控制停车,弊端是在赛车高速运行且驱动轮在前的情况下电机突然抱死刹车会导致翻车、甩尾或直接将赛车刹停的情况,影响赛车运行的稳定性和整体流畅性,无法很好地完成比赛竞速的目的。
2.2.2 电机反转刹车
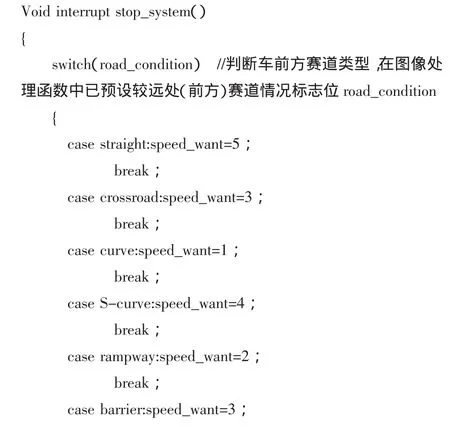
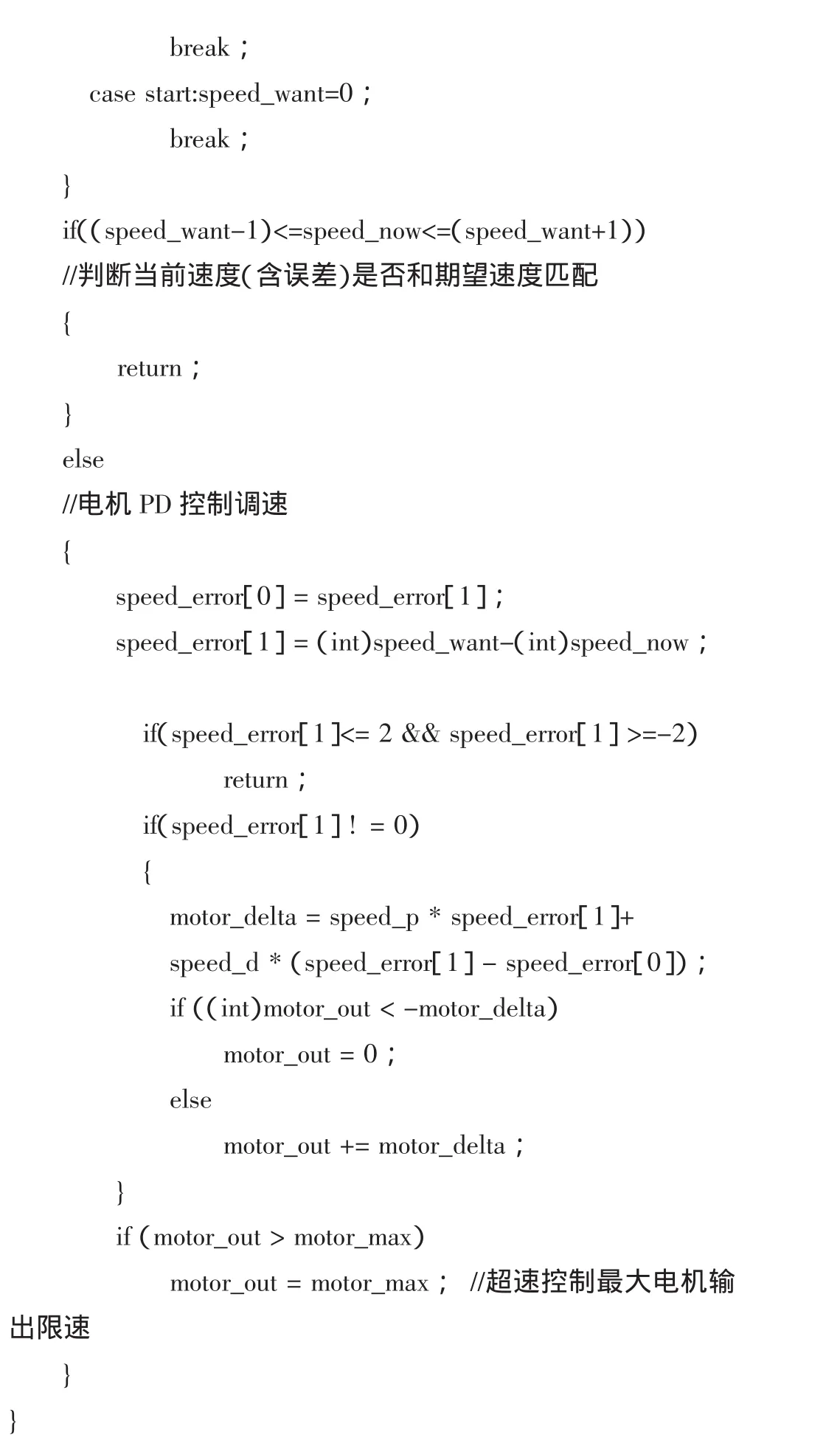
电机反转刹车是通过在正常输出正向PWM(使赛车向前进方向运动)时根据控制需要输出适当的反向PWM波使电机正转受阻从而实现降速,通过“判断当前赛道及车速、电机瞬时反转输出降速”的循环,不停修正车速,达到平稳通过前方赛道的目的。减速过程中通过PID调整控制PWM波输出,从而控制电机使车速趋于线性变化,这有利于赛车识别赛道数据信息采集的稳定性和可靠性,并且具有实时性,是一种理想可行的刹车系统解决办法。软件实现刹车系统的流程图如图3所示。
通过反转刹车实现在赛车高速行驶的情况下在不同赛道之间赛车速度平稳高效的变化响应,从而更有利于达到比赛竞速的目的。
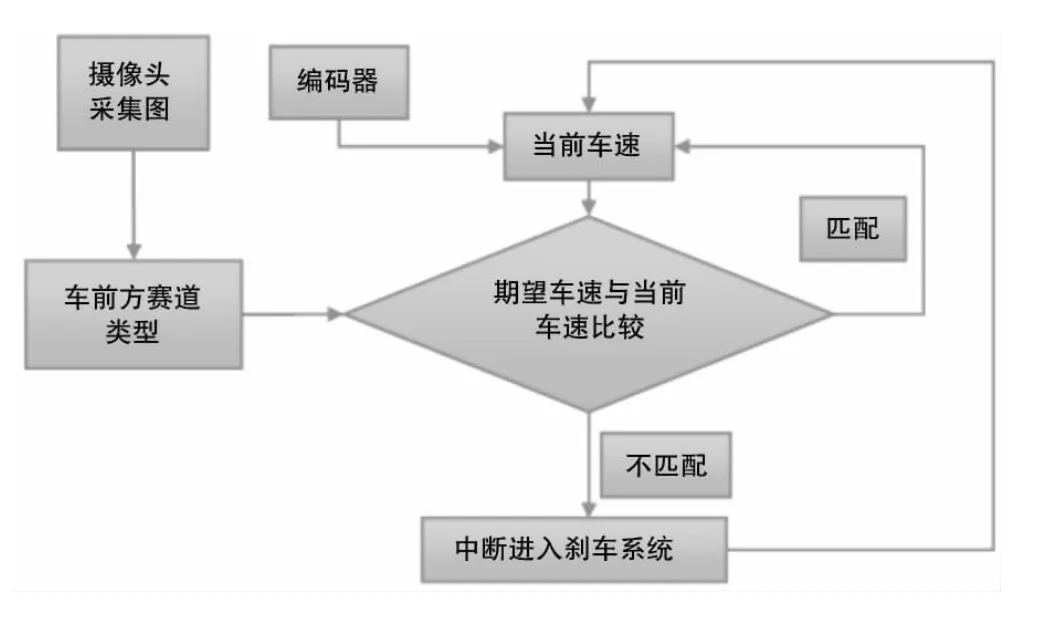
图3 软件实现刹车系统的流程
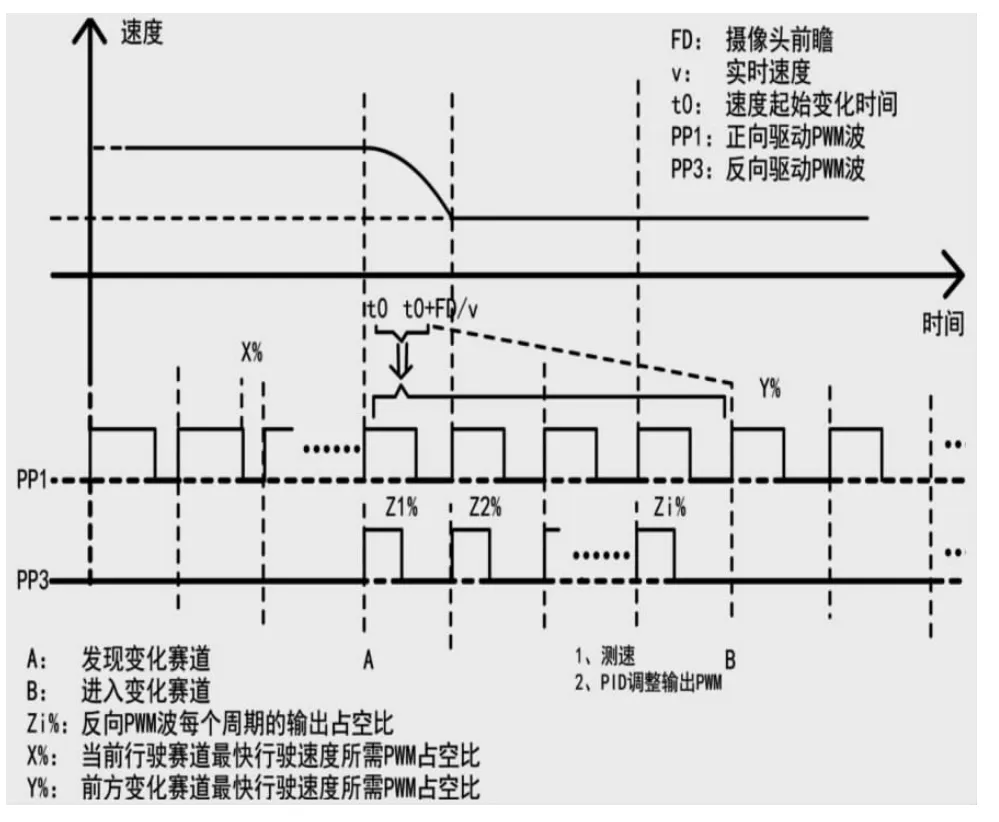
图4 刹车系统调节示意
如图4所示,当主控芯片通过摄像头对赛道类型判断出来以后,通过分析,时间轴上A点为摄像头在采集图像时第一次发现赛道变化时的时间点,在这之前2路控制正反转的PWM波PP1、PP3只有正向PWM波PP1在输出,并且输出的PWM波占空比为X%,代表当前赛道速度所需要的PWM波输出量,反向PWM波PP3没有输出量;在经过时间点A之后为通过软件对图像进行处理后发现前方开始有赛道变化即进入实际线性变速区,正向PWM波PP1的占空比需调整为Y%,代表前方赛道速度所需要的PWM波输出量。由于赛车的惯性以及其他不可预见的因素,赛车此时并不能将速度平稳地、线性地降到预期速度,此时需要反向PWM波PP3开始输出,即刹车系统开始作用,来协助调节车速变化,在每输出一个调节周期后通过编码器测速来检测是否在进入前方赛道前达到预期速度,若达到则停止调节,若没有则通过PID控制算法改变调节输出量即反向PWM波PP3的占空比Z%继续调节,直至通过编码器检测车速达到预期速度。这期间PID的参数会随图像分析中赛道行号的变化率做出调整,以使其在理想变速分界线之前完成调节。
由于在[t0,t0+FD/v]这段调节时间内调节动作是周期性的,故会出现失调、超调等失误行为(见图5)。
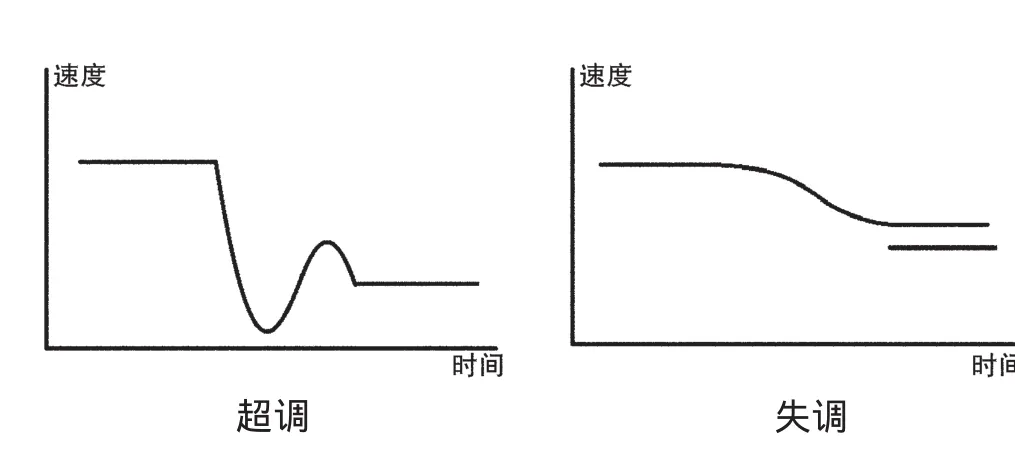
图5 非理想刹车系统波形图
此时也会对赛车的平稳运行产生一定的影响,根据软件算法的描述,即每个调节周期对2路PWM波的增加或减少量是决定是否出现超调或失调现象的关键因素,故应在每个调节周期内对采集回来的速度与下一赛道预期速度进行实时比较后对PWM波占空比的增加或减少量进行相应改变,使在调节时间内的速度保持近似线性变化。
另外PWM的初始改变量不宜过大,且是以正向PWM输出PP1从X%占空比变化到Y%为主要目的,反向PWM输出PP3辅助使速度快速(高效性)变化的同时也保持速度线性(平稳性)变化,随着每一调节周期的反馈比较进而对变化量参数改变后再进行控制输出,直至赛车在进入下一赛道类型前平稳运行在预期速度,从而达到赛车在变速的过程中依然快速且平稳运行的目的。
3 核心程序
4 结语
通过引入刹车系统实现赛车在高速运行情况下的有效制动,减少了“实际线性变速区”的范围以及赛车因速度过快却无法控制而产生的车体晃动、甩尾、漂移等不稳定情况的出现,从而增加了赛车能以更快的速度平稳跑完赛道的可能性,也为以更快速度且平稳的完成比赛提供了更多的可能。
[1]李俊,王军辉,谭秋林,等.基于MC9S12XS128控制器的智能车图像处理技术研究[J].化工自动化及仪表,2012(2).
[2]张阳,吴晔,滕勤.MC9S12XS单片机原理及嵌入式系统开发[M].北京:电子工业出版社,2011.
猜你喜欢
幼儿画刊(2023年11期)2024-01-15 10:00:32
公民与法治(2022年4期)2022-08-03 08:20:24
走向世界(2022年3期)2022-04-19 12:38:58
小哥白尼(趣味科学)(2020年6期)2020-05-22 06:43:14
疯狂英语·新悦读(2019年10期)2019-12-13 09:02:28
空中之家(2017年11期)2017-11-28 05:28:21
创新作文(小学版)(2017年4期)2017-05-17 05:33:00
创新作文(小学版)(2016年20期)2016-04-11 08:43:43
科普童话·百科探秘(2015年6期)2015-10-13 07:05:15
伴侣(2015年5期)2015-09-10 07:22:44